Общие сведения. Датчики могут быть основаны на применении самых разнообразных физических явлений
Датчики могут быть основаны на применении самых разнообразных физических явлений. В качестве выходных величин чаще всего используются активное, индуктивное, ёмкостное сопротивления, ток, ЭДС или падение напряжения, частота и сдвиг фаз переменного тока. Основной характеристикой датчика является его чувствительность S [1, c. 407]:
 , (6.1)
, (6.1)
где, DY – приращение выходной величины;
DX – приращение входной величины.
В практике пользуются также относительной чувствительностью S0.
 , (6.2)
, (6.2)
где, Y – полное изменение выходной величины;
X – полное изменение входной величины.
Датчики могут быть линейными (S – постоянная) и нелинейными (S – переменная). У последних чувствительность зависит от значения входной величины.
Существенным параметром датчика является порог чувствительности – это изменение входной величины, вызывающее наименьшее изменение выходной величины, которое может быть обнаружено без каких – либо дополнительных устройств.
Важнейшим параметром датчика является его погрешность.
Номинальной характеристикой датчика называется зависимость выходной величины от входной, которая приписывается паспортом и используется как расчетная при проведении измерений. Экспериментально снятая, реальная зависимость «вход – выход» отличается от номинальной на погрешность.
Различают абсолютную и относительную погрешности датчика по входу.
Абсолютная погрешность DX равна:
 DX = Xвх×н – Xд, (6.3)
DX = Xвх×н – Xд, (6.3)
относительная погрешность:
g0 = DX / Xд , (6.4)
где, Xвх×н – значение входной величины датчика, определяемое по физическому значению выходной величины и номинальной характеристике;
Xд – истинное значение входной величины.
Аналогично могут быть рассмотрены погрешности датчика по выходу.
На погрешность оказывают влияние внешние условия: температура, магнитные и электрические поля, влажность окружающей среды, напряжение и частота источника питания, вибрации и др.
Допустимая интенсивность внешних (влияющих) факторов ограничивается техническими условиями или стандартом.
Погрешности датчика при нормальных значениях влияющих внешних факторов называются основными.
На рисунок 6.1. показана зависимость относительной погрешности g0 от входной величины X [1, c. 408]. Здесь XH – нижнее значение, XВ – верхнее значение входных величин, при которых нормируется основная погрешность.
Различают аддитивную погрешность, независимую от Х, и мультипликативную погрешность, зависимую от входной величины (погрешность чувствительности).
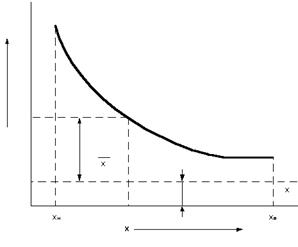
Рисунок 6.1. Погрешности датчиков
Абсолютная и относительная погрешности выражаются формулами;
 (6.5)
(6.5)
 (6.6)
(6.6)
где, D0 – аддитивная погрешность;
gS – относительная погрешность чувствительности.
Если влияющие внешние факторы выходят за границы нормируемых, то возникают дополнительные погрешности. Для уменьшения дополнительных погрешностей либо снижают чувствительность датчика к внешним факторам, либо уменьшают их действие путём экранирования и других средств.
Наряду с высокой чувствительностью и малой погрешностью датчики должны обладать следующими свойствами: необходимым диапазоном изменения входной величины, удобным согласованием с измерительной схемой, минимальным воздействием на входную величину. При быстро протекающих процессах изменения входной величины важно, чтобы датчик был малоинерционным.
Дата добавления: 2015-06-01; просмотров: 928;