Микропроцессорные цифровые автоматические приборы
В микропроцессорных автоматических приборах для измерения сопротивления, индуктивности и емкости используют методы, связанные с преобразованием измеряемого параметра: напряжение или ток, частоту или интервал времени, а также устройства, построенные на основе мостовых и компенсационных схем. Наибольшее распространение в практике получили цифровые автоматические приборы с микропроцессором, выполненных по схемам с использованием уравновешиваемых мостов. Уравновешивание мостов осуществляют автоматическим регулированием двух его узлов для каждого из измеряемых параметров. Упрощенная структурная схема цифрового автоматического измерителя комплексного сопротивления, построенная на основе микропроцессора:
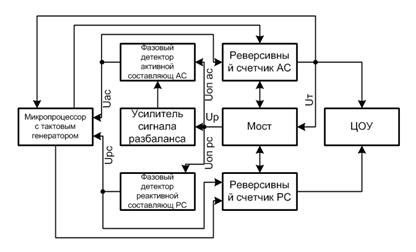
В основу этого цифрового прибора заложен мостовой метод измерения с использованием фазочувствительных детекторов уравновешивания.
Питание мостовой схемы осуществляют от генератора переменного напряжения, не указанного на схеме. Микропроцессор со встроенным тактовым генератором определенной частоты выполняет все функции управления измерительным процессом. Напряжение разбаланса моста Up через усилитель сигнала разбаланса поступает на входы фазовых детекторов АС и РС комплексного сопротивления. Опорное напряжение фазовых детекторов Uопас и Uопрс снимают с моста. С выхода фазовых детекторов Up подается на реверсивные счетчики, управляющие состоянием органов уравновешивания мостовой схемы и на микропроцессор, задающий сигналами Uас и Uрс скорость счета соответствующих реверсивных счетчиков. Направление счета реверсивных счетчиков определяет знак Uр фазовых детекторов, а скорость счета – уровень Uр.
Изменение состояния счетчика, вызванное переходом на мост очередного тактового импульса Uт с тактового генератора, приводит к изменению значения регулирующего параметра на одну младшую разряда. Опорные напряжения фазовых детекторов выбирают такими, что сигналы, вырабатываемые ими, определяются отклонением сигналов органа управления от состояния равновесия: сигнал одного детектора – отклонением по активной составляющей (АС), сигнал другого - по РС.
Управление моста осуществляется тактовыми импульсами Uт. По мере приближения к состоянию баланса моста Uр уменьшается, поэтому замедляется скорость его уравновешивания. При достижении равновесия моста дискретное уравновешивание прекращается, и результат измерения параметра поступает на ЦОУ.
Микропроцессор автоматически осуществляет самокалибровку прибора перед началом измерений и учитывает влияние внешних условий на точность измерений.
Дата добавления: 2015-05-21; просмотров: 1370;