Синтез алгоритмов последовательностных автоматов
5.5.1. Общая структура последовательностного автомата
Последовательностными автоматами называются управляющие устройства, выходные сигналы которых зависят не только от комбинации входных сигналов, имевших место в текущем такте технологического цикла, но и от комбинаций входных сигналов, имевших место в предыдущих тактах и повлиявших на внутреннее состояние автомата. Так, при перемещении рабочего органа станка по линейной траектории и достижении заданной точки рабочей зоны станка система программного управления переходит к выполнению нового кадра программы, в котором может быть задано опять же перемещение по линейной траектории, но в другом на правлении и с другой скоростью. Сигналом к переходу на отработку нового кадра программы является в этом случае совокупность сигналов датчиков положения о достижении заданной точки в пространстве.
В простейших последовательностных автоматах, которые далее будем называть просто автоматами, программа работы жестко закладывается в конструкцию автомата и определяет последовательность смены его состояний. Каждое состояние автомата характеризуется отличным от соседнего состояния способом реагирования на поступающие входные сигналы. Переход от одного состояния к другому определяется как комбинацией входных сигналов, так и конкретным состоянием, в котором находится автомат.
Самым простым способом смены состояний является случай, когда все состояния пронумерованы и их смена производится в порядке увеличения (или уменьшения) номеров. Запоминание состояний автомата обычно производится с помощью двоичных элементов памяти, таких как электронный триггер (см. подразд. 5.6) или электромагнитное реле. Число состояний М, которые можно запомнить с помощью совокупности из т таких элементов, достигает М = 2т, так что число запоминающих элементов т определяют с помощью неравенства
т > log2M. (5.7)
Если обозначить через ^совокупность сигналов обратной связи (входных сигналов), поступающих от ТО, через Y — совокупность сигналов управления (выходных сигналов), подаваемых на ТО, а через Z — совокупность внутренних управляющих сигналов, отображающих текущее состояние автомата, то окажется, что одним и тем же значениям А'соответствуют различные значения Y, если при тех же X значения Z различны.
Общая структура последовательностного автомата приведена на рис. 5.8. Автомат состоит из двух основных блоков: арифметико-логического устройства (АЛУ) и устройства формирования состояний (УФС). Блок АЛУ является комбинационной частью последовательностного автомата. Он производит заданные арифметические и логические операции над входными сигналами X' и управляющими сигналами Z'~', причем у простейших автоматов производятся только логические операции.
Блок УФС, действуя посредством совокупности управляющих сигналов Zf-\ задает операции, которые должно произвести АЛУ над входными сигналами X' в текущем рабочем такте. Выходные сигналы АЛУ подразделяются на две группы: Y' и Z', причем индекс t означает момент времени или номер такта, в котором были выработаны данные сигналы.-
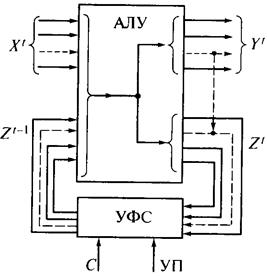
Рис. 5.8. Общая структура последовательностного автомата
Сигналы V — это управляющие сигналы, подаваемые на технологический объект, а сигналы Z' — это внутренние управляющие сигналы, характеризующие внутреннее состояние автомата. Они подаются совместно с некоторыми сигналами У в УФС и там запоминаются. Затем эти сигналы обрабатываются в соответствии с действиями, предусмотренными очередным кадром управляющей программы (УП), и подаются на вход АЛУ после прихода очередного тактового импульса Сна вход синхронизации. Синхронизация предотвращает подачу управляющих сигналов Z'-1 до того, как они будут полностью сформирован ы в УФС. После того как они сформируются и будут поданы в АЛУ, в УФС смогут поступить новые сигналы Z' и V — сигналы следующего такта управления. Следовательно, управляющие сигналы Z' 1 на входе АЛУ относятся к предыдущему такту работы АЛУ, о чем свидетельствует индекс
У простейших автоматов внешняя УП после задания режима работы в УФС не поступает. Их поведение в технологическом цикле целиком определяется распределением сигналов Y' и Z', которые поступают в УФС и там запоминаются. После подачи тактового импульса на вход С совокупность сигналов Z (часть которых может совпадать с выходными сигналами Y) поступает на входы АЛУ, задавая логические операции, которые оно должно совершить в течение нового рабочего такта.
У очень простых автоматов, работающих по принципу асинхронного управления, особый генератор тактовых импульсов отсутствует, а гонка импульсов предотвращается тем, что при любых переходах из одного состояния в другое допускается изменение значения только одного сигнала из всей совокупности внутренних управляющих сигналов Z. В этом случае изменение очередного сигнала ц из совокупности Z является как бы синхронизирующим импульсом, задающим функционирование АЛУ в новом такте //+, работы автомата. Алгоритм последовательностного автомата удобно составлять исходя из структурной схемы, приведенной на рис. 5.8. На этой схеме АЛУ является комбинационной частью автомата, а УФС включает в себя ЗУ, задающие посредством сигналов Z'"1 режим работы АЛУ в каждом рабочем такте автомата в течение технологического цикла. В простейших автоматах сигналы Z'~1 — это сигналы Z' и, возможно, часть сигналов Y', сформированных в предыдущем такте автомата и запомненных в УФС. Следовательно, составление алгоритма простого автомата естественным образом разделяется на два этапа. На первом этапе составляется алгоритм функционирования АЛУ в виде

по правилам составления комбинационных схем, а на втором этапе уточняются структура ЗУ в составе УФС и порядок формирования синхронизирующих импульсов. Функцию Y' принято называть функцией выходов, а функцию Z' — функцией переходов от состояния к состоянию автомата.
Благодаря обратной связи последовательностные автоматы обладают специфическим свойством, отличающим их от комбинационных и характерным для замкнутых систем управления - они могут быть устойчивыми и неустойчивыми. Устойчивым будем называть состояние, когда комбинация выходов меняется лишь вследствие изменения входа. Неустойчивые автоматы могут после установления комбинации входов несколько раз менять комбинацию на выходе, проходя ряд неустойчивых состояний. Такой процесс может завершиться переходом в устойчивое состояние (затухание колебаний) либо продолжаться неограниченное время (автоколебания).
Разрыв цепи ОСпревращает последовательностные автоматы в комбинационные.
Комбинационные автоматы (разомкнутые) всегда устойчивы, как и разомкнутые аналоговые звенья. Формальным признаком устойчивого состояния является равенство
а неустойчивого — неравенство
5.5.2. Составление схемы простейшего автомата
Для лучшего усвоения положений теории последовательностных автоматов рассмотрим пример составления схемы такого автомата в релейно-контактном и электронном вариантах.
Пример 5.2.Составить схему регулирования уровня рабочей жидкости в резервуаре в пределах от нижнего уровня, контролируемого поплавковым датчиком dH, до верхнего уровня, контролируемого аналогичным датчиком dB.
Нормальным состоянием датчиков будет считаться такое состояние, при котором заданный уровень достигнут и контакты датчиков разомкнуты (du = 0, dn = 0). Пока не достигнут верхний уровень, т.е. пока dR = 1,насос Н, питающий резервуар, должен быть включен (Н = 1).При достижении верхнего уровня, когда da = 0, насос должен отключиться и оставаться отключенным (Н = 0) до тех пор, пока жидкость не опустится ниже нижнего контролируемого уровня, т.е. пока не замкнутся контакты нижнего датчика (dH = 1).
Технологический цикл регулирования уровня жидкости отображен циклограммой, представленной в табл. 5.7.
Когда оба датчика сигнализируют о том, что заданный уровень не достигнут (d„ = 1и dR = 1),насос включен (Н = 1).Когда оба датчика сигнализируют о том, что заданный уровень достигнут (d„ = 0 и dK = 0), насос выключен (Н = 0). Но когда нижний датчик сигнализирует о том, что заданный уровень достигнут (dn = 0), а верхний датчик сигнализирует о том, что заданный уровень не
Таблица 5.7
| Элементы | Такты | |||
| схемы | ||||
| Датчик dH | ||||
| Датчик dB | ||||
| Насос Н | ||||
| Состояния |
достигнут (dB = 1),то в такте 2 насос должен оставаться включенным, а в такте 4— выключенным. Для того чтобы различать эти два случая, обозначим один из них состоянием 1,а второй — состоянием 2. В системе управления насосом для различения состояний 1и 2 можно было бы ввести некую функцию Z, но поскольку она совпадает с функцией Н включения насоса (см. табл. 5.7), принимаем Z= Н.
Составим таблицу истинности для выхода Н' комбинационной части (АЛУ) проектируемого устройства регулирования уровня (табл. 5.8). В данном случае, поскольку Z= Н, составленная таблица выходов, отображающая функцию выхода Н', совпадает с таблицей переходов, отображающей функцию переходов насоса из одного состояния в другое.
В табл. 5.8 Н' 1 означает значение Н в предыдущем такте работы проектируемого устройства, а значение Н' — это то значение, которое должно формироваться в текущем такте. Если Н'= Н'_|, то данное состояние устойчиво, а если Н'* Н'~', то данное состояние не устойчиво и перейдет в другое состояние, соответству-
Таблица 5.8
| Входы | Выход | ||
| d» | d. | Н'-' | Н' |
| *(0) | |||
| *(0) | |||
ющее тому же сочетанию входных сигналов, но другому значению Н. Так, состояние, записанное во второй строке (сверху) табл. 5.8, имеет Н'"1 = 1,а Н' = 0.Оно переходит в состояние, записанное в первой (верхней) строке, где Н'_| = Н' = 0.Это означает, что когда при работающем насосе (Н' 1 = 1)будет достигнут верхний уровень заполнения резервуара (dH = 0и J„ = 0),система управления должна выключить насос (Н' - 0).Если в этой ситуации насос окажется выключенным (Н'"1 = 0,dH - 0,dB = 0),то он и далее должен оставаться выключенным (Н' = 0).
При составлении таблицы перебирались все сочетания значений dH, dB и Н'"1 от 000до 111в порядке счета в двоичном арифметическом коде (см. подразд. 2.3) и определялось, каким должно быть дальнейшее состояние Н' насоса при данной комбинации сигналов датчиков и текущем состоянии Н'"' насоса. Так, если рассмотрим предпоследнюю строку таблицы истинности (1101),то увидим, что в этой ситуации сигналы датчиков (dH = I и dB = 1)свидетельствуют о том, что уровень жидкости в резервуаре снизился ниже допустимого минимума, а насос отключен (Н'_| = 0).Следовательно, система управления должна его включить, о чем свидетельствует последующий выходной сигнал Н'= 1.
В пятой и шестой строках табл. 5.8 на месте значений Н' проставлены звездочки, которые свидетельствуют о невозможности данной ситуации (dH = 1и dB = 0)при нормальном функционировании системы регулирования. Ведь если действительно d„ = 1,то уровень жидкости в резервуаре ниже допустимого минимума, так что и верхний датчик должен выдавать сигнал dB — 1. Если же сигнал du = 0верен, то уровень жидкости выше верхнего допустимого максимума и нижний датчик, тем более, должен выдавать сигнал dH = 0.Следовательно, при dH = 1и dB = 0один из датчиков явно неисправен и система регулирования не может нормально функционировать.
В этой ситуации естественным решением является блокирование автоматической системы регулирования и переход к ручному управлению наполнением резервуара. Для этого следует предусмотреть отключение насоса при появлении неправильной комбинации входных сигналов, т.е. в пятой и шестой строках табл. 5.8 проставить Н' = 0.Если неисправен датчик dB, т.е. всегда dB = 0,то при появлении такой неисправности система регулирования уровня, однажды отключив насос, уже не сможет его включить. Если неисправен датчик d„, т.е. всегда du= 1,то система регулирования сможет включать насос при dH = 1и dB = 1, но сигнал на включение будет возникать всякий раз, когда контролируемый уровень жидкости окажется меньше максимально возможного уровня, контролируемого датчиком dB. При этом частота цикла включений-отключений оказывается чрезмерно большой, что вынуждает перейти на ручное управление.
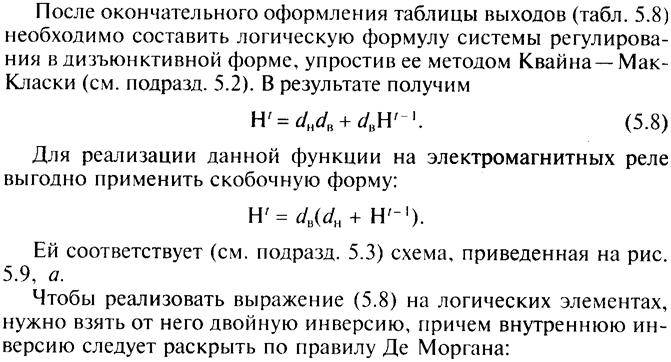
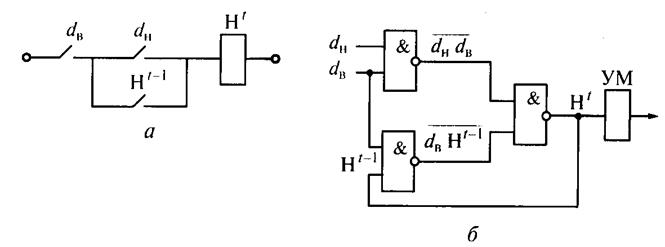
Рис. 5.9. Схемы регулирования уровня жидкости в резервуаре на электромагнитных реле (а) и на логических элементах И—НЕ (б)
Аналогично действует обратная связь в схеме на логических элементах. Например, когда сформируются единичные входные сигналы dH - 1и da = 1,в этот момент времени на вход Н' 1 еще подан сигнал Н' = 0, а не Н' = 1,который соответствует согласно выражению (5.8) входным сигналам dn = 1и dB = 1.Сигнал Н' = 1появится лишь после прохождения управляющего сигнала, обусловленного значениями dlf = 1и dB = 1, через два элемента И — НЕ (см. рис. 5.9, б). Теперь, если сравнить схемы, приведенные на рис. 5.9, с общей структурой последовательностного автомата, приведенной на рис. 5.8, то окажется, что релейно-контактная структура, представленная на рис. 5.9, о, и вся логическая схема, представленная на рис. 5.9, б, кроме проводника Н'— Н' ', входят в состав АЛУ, комбинационной части автомата. На долю УФС остаются электромеханическая часть реле Н', управляющая положением контактов Н'"1, и проводник Н'— Н'"1 в логической схеме, представленной на рис. 5.9, б. Однако этого достаточно, чтобы обеспечить запоминание каждого из двух состояний насоса (включенного и отключенного) и четкий переход из одного состояния в другое.
Простота АЛУ, которое реализует в данном случае только логические операции, и УФС, которое просто передает с элементарной задержкой сигнал о состоянии автомата и обеспечивает запоминание этого сигнала, не должны нас смущать. Несмотря на простоту структура рассмотренной схемы регулирования уровня жидкости в резервуаре соответствует структуре последовательностного автомата, приведенной на рис. 5.8.
Отметим также экономичность релейно-контактного варианта по сравнению с электронным. Ведь реле Н' может быть смонтировано на той же панели, что и силовой контактор, и питается оно от того же источника питания. А электронная схема требует применения особой монтажной платы и особого источника питания, да и стоимость электронных компонентов схемы может оказаться выше стоимости реле Н'. Указанные факторы определяют экономичность несложных релейно-контактных схем управления по сравнению с электронными схемами при небольшой частоте переключений.
Дата добавления: 2015-05-16; просмотров: 1959;