Ж) Корректирующие устройства
Для улучшения динамических свойств в систему, кроме рассмотренных функционально необходимых элементов, вводят корректирующие устройства, которые в зависимости от места включения бывают последовательными ипараллельными. Последовательное корректирующее устройство 3 включается в цепь сигнала ошибки и обычно находится между отдельными каскадами усилителя. Параллельное корректирующее устройство 5 выполняется в виде местных обратных связей, которыми охватываются наиболее инерционные элементы
Корректирующее устройство, путем различных дополнительных воздействий на рабочий процесс системы, изменяет протекание процесса регулирования. Эти воздействия могут быть пропорциональны регулируемой величине или какому-либо другому избранному параметру, или пропорциональны скорости изменения избранных параметров, а в некоторых случаях и ускорению.
Иногда требуется, чтобы дополнительное воздействие корректирующего устройства было пропорционально интегральному значению изменения избранного параметра за заданный промежуток времени.
Если в регуляторе отсутствует усиление сигналов управления по мощности, то он называется регулятором прямого действия. В регуляторе прямого действия измерительное устройство непосредственно соединяется с регулирующим органом.
Регулирующий орган непосредственно воздействует на регулируемую среду, поступающую в объект регулирования с целью количественного или качественного изменения этой среды для поддержания заданного значения регулируемого параметра.
Как правило, регулирующий орган тесно связан с объектом регулирования и, во многих случаях, конструктивно встроен в объект. (например, у всех силовых двигателей).
Для возможности управления энергоблоком в его конструкции предусмотрены специальные клапаны на трубопроводах питательной воды и пара, направляющие аппараты вентиляторов и т. д.
Разделение всех элементов, входящих в цепь регулирования, на регулируемый объект и автоматический регулятор в ряде случаев оказывается условным, так как некоторые из элементов схемы в равной степени можно отнести и к регулятору и к объекту (например, регулирующий орган).
Поплавковый регулятор уровня. Одним из первых в мире технических регуляторов является поплавковый регулятор уровня жидкости, построенный И. И. Ползуновым в 1795 г. для поддержания постоянного уровня воды в паровом котле. Сейчас регуляторы такого типа находят широкое применение в технике. Примером простейшего и в то же время наиболее распространенного современного регулятора уровня является поплавковая камера автомобильного карбюратора (рис. 1.24, а). 
Объектом регулирования является камера 1, в которой уровень бензина Н непосредственно измеряется положением поплавка 2. Системой рычагов с поплавком связана игла 3, регулирующая приток бензина в камеру Q. При уровне Н = Н0 игла полностью запирает канал притока бензина, т. е. Q = 0. Величина H 0 задает требуемое значение регулируемой величины; она устанавливается при наладке регулировкой рычага иглы.
Внешним неконтролируемым воздействием служит расход бензина Q, поступающего к жиклерам двигателя. Этот расход приводит к уменьшению уровня в поплавковой камере.
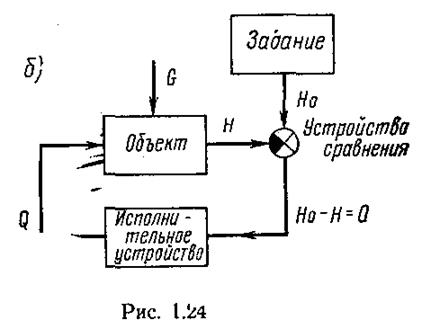
Функциональная схема рассматриваемого регулятора показана на рис. 1.24, б. В ней выделено два элемента системы: поплавковая камера, служащая объектом, совмещенным с измерительным устройством, на вход которого подается разность Q - G, а выходной величиной является уровень бензина H; исполнительное устройство, представляющее собой управляемый изменением положения поплавка и перемещением иглы канал притока бензина, задающий величину Q.
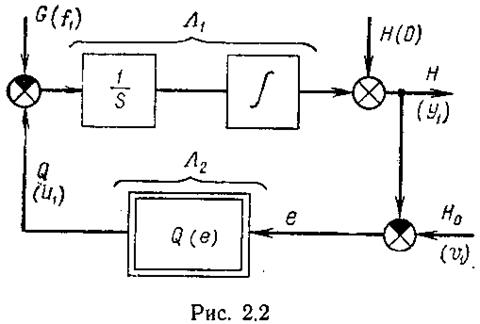
Поплавковый регулятор уровня. Зависимость между перемещением поплавка е = Н0 — Н по отношению к заданному уровню Н0 и скоростью притока бензина Q в поплавковую камеру выражается некоторой монотонной функцией Q (e). Учитывая уравнение резервуара (1.3), для регулятора можно записать уравнение: 
которое соответствует общему выражению (2.1) при x  = H,. v, = H0, f =G.
= H,. v, = H0, f =G.
.В качестве координаты вектора у можно принять y = Н.Структурная схема, соответствующая уравнению (2,3), представлена на рис. 2.2
Тема IV: Основные принципы регулирования и математического описания динамики объектов и систем
Дата добавления: 2015-05-16; просмотров: 1194;