Преобразователи координат и фаз. Математическая основа преобразования координат поясняется на рис.61
Математическая основа преобразования координат поясняется на рис.61
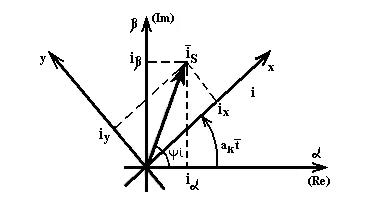
Рис.61 Преобразование координат
В неподвижной системе координат (  ,
,  ) вектор тока (напряжения, потокосцепления) может быть представлен в алгебраической и показательной форме:
) вектор тока (напряжения, потокосцепления) может быть представлен в алгебраической и показательной форме:

Аналогично, в системе вращающихся координат (  ), тот же вектор может быть представлен в виде:
), тот же вектор может быть представлен в виде:

Отсюда легко получить уравнение перехода от неподвижной системы координат к вращающейся, и наоборот:
 ,
,  ,
, 
При построении реальных систем электропривода переменного тока, как асинхронных, так и синхронных, практически всегда в систему управления включаются преобразователи координат. Это обусловлено тем, что реальные токи в обмотках статора - это токи в неподвижной системе координат.
Поэтому, как правило, современные электроприводы переменные тока содержат преобразователи обоих типов. Кроме того, они содержат преобразователи фаз 2/3 и 3/2. Первые преобразовывают токи  и
и  в фазные токи
в фазные токи  ,
,  ,
,  , в соответствии с выражениями:
, в соответствии с выражениями:
 ,
,  ,
, 
А вторые преобразовывают токи , , в проекции и , в соответствии с выражениями:
 ,
, 
В итоге, функциональная схема электропривода приобретает вид, представленный на рис.62.
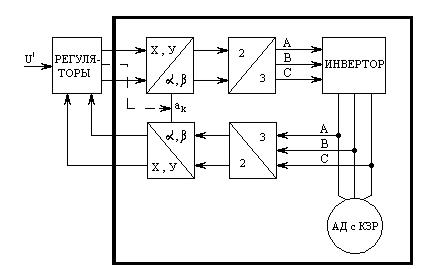
Рис.62 Функциональная схема асинхронного электропривода
В блоке регуляторов на основе задающего сигнала  и сигналов из каналов обратной связи, переменными состояниями вырабатываются сигналы управления во вращающейся системе координат, а также скорость вращения системы координат (
и сигналов из каналов обратной связи, переменными состояниями вырабатываются сигналы управления во вращающейся системе координат, а также скорость вращения системы координат (  ). Затем эти сигналы переводятся в систему неподвижных координат, которые управляют инвертором. Используя вращающуюся систему координат при анализе и синтезе асинхронного электропривода, удается часть схемы, обведённую жирной линией на рис.62, описать одной системой уравнений (55) . это описание достаточно точно, когда инвертор управляется синусоидальным ШИМ. В этом случае моделирование не встречает больших затруднений.
). Затем эти сигналы переводятся в систему неподвижных координат, которые управляют инвертором. Используя вращающуюся систему координат при анализе и синтезе асинхронного электропривода, удается часть схемы, обведённую жирной линией на рис.62, описать одной системой уравнений (55) . это описание достаточно точно, когда инвертор управляется синусоидальным ШИМ. В этом случае моделирование не встречает больших затруднений.
Дата добавления: 2015-05-08; просмотров: 1287;