УПРАВЛЕНИЕ РУЛЯМИ
Управление рулями осуществляется трехканальными необратимыми приводами, которые питаются от трех независимых гидросистем. Подключение гидропитания к рулевым приводам производится тремя выключателями «Бустерное управление», которые расположены на верхнем электрощитке слева. Во включенном положении выключатели «Бустерное управление» закрываются колпачком.
Управление рулем высоты
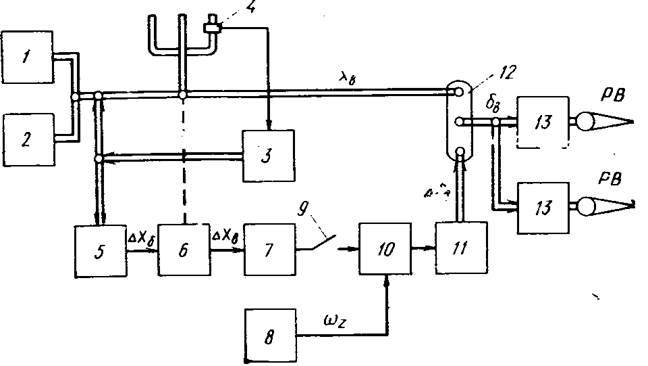
Система управления рулем высоты предназначена для штурвального и автоматического управления самолетом в вертикальной плоскости (рис. 19). Система состоит из двух колонок, двух рулевых приводов РП-56 (13), двух пружинных загружателей 1,2, механизма эффекта триммирования МЭТ-4Б (3), проводки управления, дифференциальной качалки 12, рулевого агрегата PA-56B-l(11), датчиков ДПС-l (5), ДПС-2 (6), БДГ-26 (8) и блоков системы АБСУ-I54.
|
Рис. 19. Блок-схема штурвального управления рулем высоты:
l-взлетно-посадочный пружинный загружатель; 2-попетный пружинный загружатель; 3-мехаиизм эффекта триммирования МЭТ-4Б; 4 -переключатель механизма МЭТ-4 Б; 5-строенный датчик положения ДПС-l; 6-датчик ДПС-2: 7-блок штурвального управления БШУ-l; 8-блок демпфирующих гироскопов БДГ-26; 9-выключателъ «Продольная управляемость». 10~блок автопилота БАП-l-l; 11-рулевой агрегат РА-56В-1; 12-дифференциалъная качалка; 13-рулевой привод; Хв -сигнал механики; ∆δв сигнал отклонения РВ от РА-56В; ∆Хб -сигнал автоматики; δв -снгнал отклонения РВ; ω –снгнал угловой скорости относительно поперечной оси
В штурвальном режиме управления руль высоты отклоняется пропор-ционально алгебраической сумме двух перемещении от колонки и от агрегата РА-56В- 1. Суммирование этих перемещений осуществляется на дифферен-циальной качалке, причем перемещения, выдаваемые рулевым агрегатом, :не передаются на командные рычаги пилотов. Агрегат РА-56В-1 является трехканальным элекгрогидравлическим рулевым агрегатом, который питается от трех независимых гидросистем. Выключатели гидропитания подканалов
РА-56В-1 расположены на приборной доске бортинженера. В продольном канале режима штурвального управления АБСУ-I54 улучшает характеристики устойчивости и управляемости самолета. Сигналы управляемости снимаются с датчиком ДПС-I и ДПС-2 (датчики положения строенные). Сигналы устойчивости снимаются с блока демпфирующих гироскопов БДГ-26.
Датчик ДПС- 1 выдает сигналы, пропорциональные перемещению штока МЭТ-4Б МЭТ-ЧУ (3), Хб (сигнал балансировки), датчик ДПС-2 - сигналы, пропорциональные отклонению колонки от балансировочного положения в процессе управления пилотом. Умножение сигналов ДПС-I осуществляется в ДПС-2. Сигналы с ДПС-2 подаются в блок штурвального управления БШУ-I (7), где преобразуются и подаются в блок автопилота БАП-I-I (10), суммируются с сигналами демпфера, снятыми с БДГ-26, и подаются на подканалы сервопривода СП-l Г рулевого агрегата РА-56В-1 (11) канала тангажа.
Штоки подканалов РА-56В-I (11) перемещают траверсу. Траверса РА-56В-I передает движение на дифференциальную качалку 12, где про изводится алгебраическое суммирование сигнала от колонки и от PA-56B-l.
Сигналами с датчика ДПС-I и ДПС-2 подбирается коэффициент передачи от колонки на руль высоты при каждом балансировочном положении самолета в продольном канале, т. е. сигнал управляемости обеспечивает требуемый расход колонки на единицу перегрузки. В случае отказа блока БШУ-I (загорается табло «Продольная управляемость») сигналы продольной управляемости необходимо отключить выключателем «Продольная управляемость» на приборной доске бортинженера. При этом отключаются сигналы с ДПС-I и ДПС-2. Управление самолетом в продольном канале будет осуществляться от колонки, а АБСУ-I54 будет работать как демпфер рыскания в продольном канале.
В режиме автоматического управления в продольном канале руль высоты управляется только от РА-56В-1. В зависимости от включенного режима системы АБСУ-I54 в продольном канале сигналы с соответствующих датчиков будут подаваться в блок автопилота БАП-I-I (10), если самолет уйдет от стабилизируемого параметра. Эти сигналы будут суммироваться с сигналами демпфера и подаваться на подканалы сервопривода агрегата PA-56B-l, который через дифференциальную качалку переместит руль высоты (РВ). РВ отклонится и приведет самолет на стабилизируемый параметр (рис. 20).
При изменении центровки самолета (выработка топлива, выпуск и уборка механизации, изменение скорости полета) изменится угол тангажа, т. е. появится статическая ошибка тангажа. Сигнал ошибки тангажа подается на РА-56В-1 и устройство автоматического триммирования (УАТ) 3. УА Т выдает сигнал на 1 подканал МЭТ-4Б (МЭТ-4У), который переместит тягу управления

Рис. 20. Упрощенная блок схема управления pyлeм высоты в автоматическом режиме:
1-пружинный загружатель: 2-механизм эффекта триммирования МЭТ-4Б; 3-устройство автоматического триммирования; 4-дифференцнальная качалка; 5-рулевой привод; б-мало-габаритная гировертикаль: 7-пульт управления; 8-вычислитель корректора высоты; 9-блок демпфирующих гироскопов; 10-блок автопилота БАП-l-l; 11-рулевой агрегат PA-56B-l; υ-сигнал тангажа; γ-сигнал крена; γ зад-сигнал от рукоятки «Спуск -Подъем; ∆H -сигнал отклонения от стабилизатора высоты; ωz- сигнал угловой скорости; ∆δв-сигнал агрегата PA-56B-l.; δв-угол отклонения РВ
руля высоты, а, следовательно, руль высоты и колонку в новое балан-сировочное положение. Таким образом, осуществляется автотриммирование в продольном канале режима автоматического управления. При отказе 1 под-канала МЭТ-4Б (МЭТ-4У) автоматически включается II подканал и система автотриммирования продолжает работать. При отказе обоих подканалов автотриммирования режим автоматического управления продольного канала отключается системой контроля АБСУ-154. Дальнейшее управление рулем высоты будет осуществляться в режиме штурвального управления.
2. Управление элеронами
Система управления элеронами предназначена для штурвального и автоматического управления самолетом в боковой плоскости (рис. 21).
Система состоит из штурвала, рулевого привода РП-55 (8), пружинного загружателя 1 проводки, механизма триммерного эффекта, рулевого агрегата РА-56В-1 (5), датчиков и блоков АБСУ-154.
В режиме штурвального управления элероны и элероны-интерцепторы отклоняются пропорционально алгебраической сумме сигналов от штурвала и
Рис. 21. Блок-схема управления элеронами в штурвальном режиме:
l- пружинный загружатель; 2-строенный датчик положения ДПС-2; 3-блок штурваль-ного управления БШУ-I; 4-блок автопилота БАП-I-l; 5 рулевой агрегат крена РА-5б B-I; 6- блок демпфирующих гироскопов крена БДГ-26; 7 - дифференциальная качалка; 8- рулевой привод; Хэ- сигнал механического управления; ∆Хэ.- сигнал управляемости; ∆δэ-сигнал от-клонения элеронов; ωу – сигнал угловой скорости относительно вертикальной скорости
от PA-56B-I, которые суммируются на дифференциальной качалке 7. Система АБСУ-154 улучшает управляемость и устойчивость самолета. Сигналы, пропорциональные отклонению штурвала, снимаются с ДПС-2 и подаются в блок штурвального управления БШУ-I (3), сигнал блока 3 суммируется с сигналом демпфера с БДГ-26 (6) в блоке автопилота и подается на сервопривод подканалов агрегата Ра- 56В-1 (5). Траверса РА-56В-1 выдает перемещение на дифференциальную качалку, где сигнал от агрегата РА-56В-1 складывается с сигналом от штурвала.
Система АБСУ-154 в режиме штурвального управления уменьшает рас-
Рис. 22. Блок-схема управления элеронами в автоматическом режиме: l- малогабаритная гировертикаль МГВ; 2-точная курсовая система ТКС-П2; 3- пульт управления: 4- блок автопилота БАП-I-I; 5- рулевой агрегат РА-56-1; 6- диффереищиальиая качалка: 7-рулевой привод; 8-блок БДГ-26; νтек -сигнал текущего крена; ψ тек - текущего курса; ν зад - сигнал заданного крена от рукоятки «Разворот»; ∆δэ -сигнал иа дифференциаль- ную качалку от РА-5б-I; δэ - угол отклонения эnеронqв; ω х - сигнал угловой скорости относительно продольной оси.
ход колонки и устраняет рыскание самолета относительно продольной оси.
В режиме автоматического управления элероны управляются только от РА-56В-l. В зависимости от включенного режима АБСУ 154 в канале крена агрегат РА-56В-l отклоняет элероны пропорционально сигналам от соответ-ствующих датчиков (рис. 22).
3. Управление рулем направления
Система управления рулем направления предназначена для штурвального и автоматического управления самолетом по курсу. Система состоит из педалей 3 (рис.23), жесткой проводки, рулевого привода РП-56 (5), пружинных загружателей 1 и 2, рулевого агрегата РА-Б6В-l (3), датчика блока БДГ-26 (1)

Рис. 23, Блок-схема управления рулем направления без системы АБСУ154:
-взлетно-посадочный пружинный загружатель; 2-полетный пружинный загружатель; 3-педали; 4-дифференциальная качалка; 5-рулетный пружинный загружатель; 3-педали; 4-дифференциальная качалка; 5-ру левой привод РП-56
(рис. 24) и блоков АБСУ-154.
В режиме штурвального управления перемещение РН paвно алге-браической сумме сигналов от педалей и от РА-56В-l, кoтopые суммируются на
Рис. 24. Блок-схема управления рулем направления в автоматическом режиме:
-блок демпфирующих гироскопов БДГ-26 курса; 2 -блок автопилота БАП-l - l; 3- рулевой агрегат PA-56B-l; 4-дифференциальная качалка; 5-рулевой привод РП-56
дифференциальной качалке. На агрегат PA-56B-l воздействуют только сигналы демпфера с БДГ-26. Поэтому АБСУ-154 в канале курса выполняет роль демпфера рыскания относительно вертикальной оси.
В режиме автоматического управления руль направления управляется так же, как и в штурвальном режиме, только отсутствует перемещение от педалей.
В штурвальном и автоматическом режимах управления осуществляется автоматический контроль РА-56В-1.
Если загорается красное табло «Демпфер крен» или «Демпфер курс», или «Демпфер тангаж» на средней приборной доске, то это значит отказал соответствующий РА-56В-1 и управление данным
Рис. 25. Блок-схема управления рулем высоты без системы АБСУ-154
l-взлетно-посадочный пружинный загружатель; 2-полетный пружинный загружатель; 3-дифферепциальная качалка; 4-рулевой привод РП-56
рулем будет только от рычага управления без АБСУ-154, т. е. на золотник рулевого привода перемещение передается только через механические тяги (рис. 25,26).
Рис. 26. Блок-схема управления элеронами без системы АБСУ-154
-пружинный загружатель; 2-дифференциальнаи качалка: 3-рулевой привод РП-~7
Дата добавления: 2015-05-05; просмотров: 3296;