Одноковшовые строительные экскаваторы 3 страница
Выполнение основных видов планировочных работ осуществляется следующими движениями стрелы и ковша: планирование и зачистка наклонных поверхностей, расположенных ниже уровня стоянки машины – втягиванием телескопической стрелы с коррекцией толщины срезаемой стружки небольшим поворотом ковша; зачистка и планирование горизонтальных поверхностей на уровне и ниже уровня стоянки экскаватора – совмещением опускания и втягивания стрелы с периодической коррекцией положения ковша; зачистка и доводка боковых (наклонных и вертикальных) поверхностей земляных сооружений при расположении экскаватора вдоль оси сооружения (например, в траншеях) – втягиванием телескопической стрелы и поворотом рабочего органа относительно продольной оси стрелы на некоторый угол.
Гидропривод экскаваторов включает в себя сдвоенный насос, два золотниковых гидрораспределителя, гидромоторы и гидроцилиндры, фильтры для очистки рабочей жидкости, маслоохладитель и трубопроводы.
Техническая производительность одноковшового экскаватора (м3/ч):
где q – вместимость ковша, м3; Кн – коэффициент наполнения ковша (Кн=1...1,3); Кн = q'/q (где q' – объем разрыхленного грунта в ковше перед разгрузкой); Кр – коэффициент разрыхления грунта (Кр=1,15...1,4); n – число циклов за час работы; n = 3600/Тц (где Тц – продолжительность одного рабочего цикла, с).
Продолжительность рабочего цикла Тц (с) при совмещении отдельных операций

где tк, tпв, tв, tпз – соответственно продолжительность копания, поворота на выгрузку, выгрузки и поворота в забой, с.
Эксплуатационная производительность (м3/смен, м3/мес, м3/год)

где tр – длительность периода работы, ч; Кв – коэффициент использования машины по времени.
Мощность, расходуемая на копание грунта (кВт):
где Ауд – удельная энергоемкость копания, Дж/м3 (Ауд=1,5·105 Дж/м3 – для грунтов II категории, Ауд=2·105 Дж/м3 – для грунтов III категории, Ауд=2,5·105 Дж/м3 – для грунтов IV категории); tк – продолжительность копания, с (ориентировочно tк=(0,25...0,35)Тц); ηд – коэффициент использования номинальной мощности двигателя при копании (ηд = 0,75...0,85); ηп – КПД привода и рабочего оборудования (для экскаваторов с механическим приводом ηп = 0,6...0,65; с гидравлическим приводом ηп = 0,6...0,75).
Лекция 12. Траншейные экскаваторы
Траншейные экскаваторы применяют на строительстве линейных подземных коммуникаций открытым способом для рытья траншей прямоугольного и трапецеидального профиля под газо-, нефте-, водо- и продуктопроводы, канализационные и теплофикационные системы, кабельные линии связи и электроснабжения, а также рытья траншей под протяженные ленточные фундаменты зданий и сооружений и оконтуривания котлованов и выемок. Они представляют собой самоходные землеройные машины непрерывного действия с многоковшовым или бесковшовым (скребковым) рабочим органом, которые при своем поступательном перемещении разрабатывают сзади себя за один проход траншею определенной глубины, ширины и профиля с одновременной транспортировкой грунта в сторону от траншей. Производительность траншейных экскаваторов, постоянно передвигающихся во время работы и отделяющих грунт от массива с помощью группы непрерывно движущихся по замкнутому контуру ковшей или скребков, в 2...2,5 раза выше, чем у одноковшовых машин, при более высоком качестве работ и меньших энергозатратах на 1м3 разработанного грунта. Причем траншейные экскаваторы способны эффективно разрабатывать как немерзлые, так и мерзлые грунты. Типы и параметры траншейных экскаваторов определены ГОСТ 19618-85*. Главным параметром экскаваторов является номинальная глубина отрываемой траншеи.
Каждый траншейный экскаватор состоит из трех основных частей: базового пневмоколесного или гусеничного тягача, обеспечивающего поступательное движение (подачу) машины; рабочего оборудования, включающего рабочий орган для копания траншей и поперечное (к продольной оси движения машины) отвальное устройство для эвакуации разработанного грунта в отвал или транспортные средства; вспомогательного оборудования для подъема-опускания рабочего органа и отвального устройства.
Классификация и индексация. Траншейные экскаваторы классифицируют по следующим основным признакам: по типу рабочего органа – на цепные (ЭТЦ) и роторные (ЭТР); по способу соединения рабочего оборудования с базовым тягачом – с навесным и полуприцепным рабочим оборудованием; по типу ходового устройства базового тягача – на гусеничные и пневмоколесные; по типу привода – с механическим, гидравлическим, электрическим и комбинированным приводом. Наибольшее распространение получили гусеничные траншейные экскаваторы с комбинированным приводом.
В индексе траншейных экскаваторов (рис. 43) первые две буквы ЭТ означают – экскаватор траншейный, а третья – тип рабочего органа (Ц – цепной, Ρ – роторный). Первые две цифры индекса обозначают наибольшую глубину отрываемой траншеи (в дм), третья – порядковый номер модели. Первая из дополнительных букв после цифрового индекса (А, Б, В и т. д.) означает порядковую модернизацию машины, последующие — вид специального климатического исполнения (ХЛ – северное, Τ – тропическое, ТВ – для работы во влажных тропиках). Например, индекс ЭТЦ-252А обозначает: экскаватор траншейный цепной, глубина копания 25 дм, вторая модель — 2, прошедшая первую модернизацию — А.

Рис. 43. Схема индексации траншейных экскаваторов
Рабочим органом цепных экскаваторов (рис. 44) является однорядная или двухрядная свободно провисающая бесконечная цепь 5, огибающая наклонную раму 7 и несущая на себе ковши 6 или скребки.
Рабочим органом роторных экскаваторов (рис. 45) является жесткий ротор (колесо) 12 с ковшами 11 или скребками, вращающийся на роликах 8 рамы 9. Ширина отрываемых рабочими органами ЭТЦ и ЭТР траншей прямоугольного профиля зависит от ширины ковша или скребка и расположения на них режущих элементов. На один и тот же базовый тягач могут быть навешены сменные рабочие органы с различной шириной и количеством ковшей (скребков) для рытья траншей с различными параметрами профиля. Для получения траншей трапецеидального профиля рабочие органы ЭТЦ и ЭТР оборудуют активными и пассивными откосообразователями.
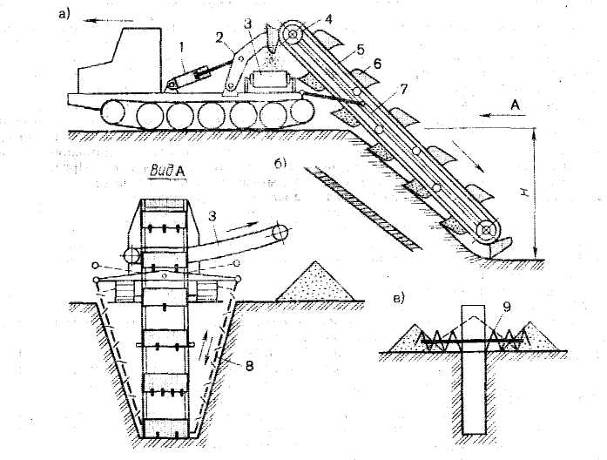
Рис. 44. Схема цепного траншейного экскаватора
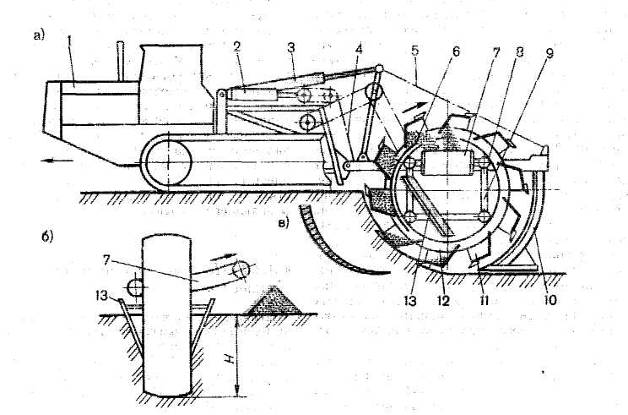
Рис. 45. Схема роторного траншейного экскаватора
Активные откосообразователи двухцепных ЭТЦ (рис. 44, а) представляют собой наклонно расположенные цепи 8 с поперечными резцами, совершающие возвратно-поступательное движение. Пассивные откосообразователи роторных машин выполнены в виде двух наклонных сменных ножей 13 (рис. 45, а), жестко закрепленных по бокам рамы ротора. Откосообразователи применяют при работе в немерзлых грунтах с низкой несущей способностью. Для разработки мерзлых грунтов цепные экскаваторы оборудуют специальными сменными рабочими органами. Ковши ЭТР при разработке мерзлых грунтов оснащаются специальными сменными зубьями, армированными твердосплавными износостойкими пластинами. Копание мерзлых грунтов ведется на пониженных скоростях тягача и рабочего органа и поэтому производительность экскаваторов снижается в 3...5 раз.
Во время работы цепь или ротор движутся в плоскости передвижения тягача. Отделение грунта от массива и заполнение им рабочего органа осуществляются в результате сообщения цепи или ротору двух совмещенных движений копания: основного — поступательного относительно рамы (для цепи) или вращательного вокруг своей оси (для ротора) и подачи поступательного в направлении движения машины. Основное движение способствует отделению слоя грунта и направлено по касательной к траектории копания. Движение подачи регулирует толщину отделяемого слоя грунта и направлено перпендикулярно (нормально) касательному. Соотношение скоростей этих движений определяет траекторию движения режущих элементов рабочего органа в продольно-вертикальной плоскости, которая представляет собой наклонную прямую у цепных экскаваторов (рис. 44, б) и трахоиду – у роторных (рис. 45, в).
Толщина стружки, отделяемая цепным рабочим органом, практически постоянна по всей высоте забоя. Роторный рабочий орган отделяет стружку переменной толщины, достигающей максимального значения на уровне оси вращения ротора. Скорость движения копания рабочего органа и скорость подачи (передвижения машины) подбирают такими, чтобы независимо от глубины траншей обеспечивалось 100%-ное наполнение ковшей. Рабочая скорость передвижения экскаваторов при копании траншей бесступенчато регулируется в широком диапазоне в зависимости от условий работы, физико-механических свойств грунтов и составляет 5...800 м/ч у цепных машин и 10...500 м/ч - у роторных. Для получения таких скоростей трансмиссии ходовых устройств базовых тягачей ЭТЦ и ЭТР оборудуют гидромеханическими ходоуменьшителями. Скорость движения рабочего органа во многом определяется способом разгрузки ковшей у роторных экскаваторов и динамическими нагрузками, действующими на цепь, у цепных. Скорость рабочего органа цепных машин не превышает 2,4 м/с, у роторных – 2 м/с. Рабочие органы современных траншейных экскаваторов имеют несколько скоростей движения, причем пониженные скорости используют при копании траншей в тяжелых талых и мерзлых грунтах. На обоих типах машин применяют гравитационный способ разгрузки под действием собственного веса грунта.
Разгрузка отделенного от массива и поднятого из траншеи грунта производится у двухцепных ЭТЦ на поперечный отвальный ленточный конвейер 3 (рис. 44, а) при повороте ковшей 6 или скребков относительно приводных звездочек 4 цепей. Эвакуация поднятого скребками на поверхность грунта по обе стороны от траншеи у одноцепных ЭТЦ осуществляется двумя шнеками 9 (рис. 44, в) винтового отвального конвейера, приводимого во вращение от цепи рабочего органа, или скребковым конвейером. У роторных экскаваторов (рис. 45, а) грунт из ковшей 11 разгружается при достижении ими верхнего крайнего положения над поперечным отвальным ленточным конвейером 7, расположенным внутри ротора 12. Преждевременному высыпанию грунта из ковшей во внутреннюю полость ротора при их подъеме препятствует передний донный щит 6. Ленточные конвейеры ЭТЦ и ЭТР отбрасывают грунт в правую или левую сторону параллельно траншее в отвал или в транспортные средства (рис. 44, а и рис. 45, в). Обычно конвейеры имеют криволинейную форму, что в сочетании с довольно большой скоростью ленты (3,5...5 м/с) обеспечивает необходимую высоту подъема и дальность отброса грунта.
Глубина отрываемой траншеи у ЭТЦ и ЭТР регулируется гидравлическим подъемным механизмом, которым осуществляется также перевод рабочего органа из транспортного положения в рабочее и наоборот. Рабочий орган ЭТЦ соединен с гидроцилиндрами 1 (рис. 44, а) подъемного механизма рычажной системой 2 и заглубляется ими в грунт, удерживается в заданном положении и выглубляется из грунта принудительно.
Рабочий орган ЭТР подвешен на пластинчатых цепях 4 и 5 (рис. 45, а) подъемного механизма и заглубляется в грунт до заданной отметки под действием собственной силы тяжести, а удерживается в заданном положении и выглубляется из грунта принудительно гидроцилиндрами 2 и 3. Независимый принудительный подъем и опускание обоих концов рабочего органа позволяют заглублять ротор и выводить его из траншеи при неподвижно стоящем экскаваторе и вести работы в стесненных городских условиях, характеризующихся, наличием густой сети дорог, подземных коммуникаций и т. п. Задняя часть рабочего органа ЭТР при копании находится в подвешенном состоянии или опирается на пневмоколесо. Позади ротора установлено зачистное устройство 10 для зачистки дна траншеи от осыпающегося грунта.
Лекция 13. Цепные траншейные экскаваторы
Цепные траншейные экскаваторы выпускаются на базе пневмоколесных и гусеничных тракторов и оснащаются одноцепным (ЭТЦ-165А) и двухцепным (ЭТЦ-151, ЭТЦ-252А) скребковым рабочим органом для разработки немерзлых грунтов, а также специальным цепным рабочим органом с резцами (ЭТЦ-208В) для разработки мерзлых грунтов.
Экскаватор ЭТЦ-165А (рис. 46) на базе колесного трактора МТЗ-82 предназначен для рытья траншей прямоугольного профиля глубиной до 1,6м и шириной 0,2...0,4 м в однородных без каменистых включений грунтах I...III категорий под укладку кабелей различного назначения и трубопроводов малых диаметров. Наиболее эффективно экскаватор используется при выполнении рассредоточенных земляных работ небольшого объема на предварительно спланированных площадках. Экскаватор оснащен поворотным гидроуправляемым бульдозерным отвалом 11 для несложных планировочных работ и засыпки траншей после укладки в них коммуникаций. На экскаватор может быть навешено сменное баровое оборудование (вместо основного рабочего) для нарезания щелей шириной 0,14 м и глубиной до 1,3м в мерзлых грунтах.
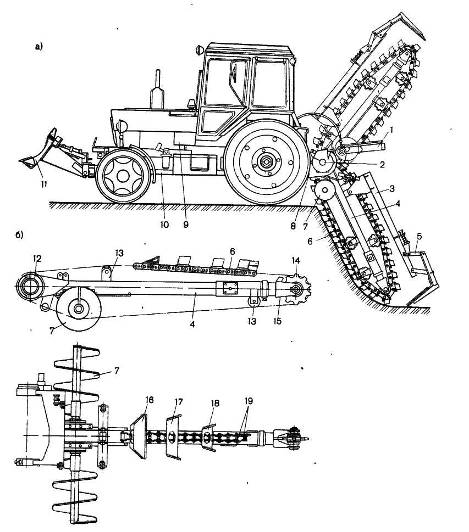
Рис. 46. Экскаватор ЭТЦ-165А:
а-общий вид; б-рабочий орган
В комплект навесного экскаваторного оборудования входят: цепной рабочий орган с зачистным башмаком и отвальным винтовым конвейером, механизм подъема – опускания рабочего органа и гидромеханический ходоуменьшитель. Однорядная втулочно-роликовая цепь 6 рабочего органа установлена на ведущей 12 и ведомой 14 звездочках и несет на себе сменные резцы 17...19 для послойного срезания грунта и сменные скребки 16 для подъема грунта из траншеи. Резцы и скребки располагаются на цепи по определенной схеме, способствующей равномерному распределению нагрузки на цепь при копании и повышению долговечности цепи. Производя смену резцов и скребков, получают траншеи различной ширины (0,2; 0,27 и 0,4 м). Цепь обегает наклонную раму 4, шарнирно прикрепляемую сзади к базовому трактору, и опирается на ролики 13. Ведущая звездочка 12 цепи, закрепленная на приводном валу 2, получает вращение от вала отбора мощности базового трактора 10 через трехступенчатый редуктор 8 с переменным передаточным числом, обеспечивающим четыре рабочие скорости (от 0,8 до 2,1 м/с) и реверсивный ход цепи. В редукторе привода цепи установлена предохранительная фрикционная муфта предельного момента. Натяжение цепи регулируется перемещением натяжной звездочки 14 относительно рамы винтовым натяжным устройством 15. Скребки выносят из траншеи грунт в направлении ведущей звездочки, образуя первоначальный отвал в виде пирамиды (рис. 44, в). Эвакуацию грунта в боковые отвалы производят два шнека 7 (рис. 46) винтового конвейера, установленного на раме рабочего органа. Шнеки имеют общий вал и приводятся во вращение скребковой цепью. Положение конвейера относительно рамы меняется в зависимости от глубины копания. К дополнительной раме 3 рабочего органа за скребковой цепью крепится сменный консольный зачистной башмак 5 для зачистки и сглаживания дна траншеи.
Заглубление рабочего органа в грунт с принудительным напором по всему диапазону глубины копания, а также его подъем при переводе в транспортное положение осуществляются гидравлическим подъемным механизмом 1, гидроцилиндр которого связан с рабочим органом рычажной системой. Для получения пониженных рабочих скоростей движения машины при копании траншей и их бесступенчатого регулирования в широком диапазоне от 20 до 800 м/ч в трансмиссию базового трактора включен гидромеханический ходоуменьшитель 9 в виде многоступенчатого цилиндрического редуктора с приводом от аксиально-поршневого гидромотора. При транспортных переездах машины ходоуменьшитель отключается. Гидромотор ходоуменьшителя, гидроцилиндры механизма подъема рабочего органа и управления отвалом бульдозера обслуживаются гидронасосами с приводом от дизеля через редуктор, а управление ими ведется из кабины машиниста с помощью двух золотниковых распределителей.
Скребковые двухцепные экскаваторы ЭТЦ-151 и ЭТЦ-252А представляют собой навесное на переоборудованный серийный гусеничный трактор ТТ-4 землеройное оборудование в виде наклонного двухцепного скребкового рабочего органа для разработки грунта с отвальным ленточным конвейером для эвакуации грунта в сторону от разрабатываемой выемки. Экскаватор ЭТЦ-252А предназначен для рытья траншей прямоугольного и трапецеидального профиля глубиной до 3,5м, шириной по дну 0,8 и 1,0м и шириной по верху до 2,8м в талых грунтах I…III категорий с каменистыми включениями, размером до 200мм.
Экскаватор ЭТЦ-151 является модификацией экскаватора ЭТЦ-252А и применяется для рытья кюветов и каналов трапецеидального профиля, глубиной до 1,5 м, шириной по дну 0,8 м и шириной по верху 3,8...5,3 м. Экскаваторы имеют механический привод рабочего органа, бесступенчатое регулирование скоростей рабочего хода гидромеханическим ходоуменьшителем, гидравлический привод отвального конвейера и механизма подъема — опускания рабочего органа.
Рабочий орган экскаватора ЭТЦ-252А (рис. 47) включает наклонную раму 12 коробчатого сечения, шарнирно прикрепляемую сзади к тягачу 1, и обегающие раму замкнутые пластинчатые цепи 6, к которым на одинаковом расстоянии друг от друга крепятся режущие элементы скребкового типа 8 и транспортирующие заслонки 9, образующие подобие ковшей. В передней части рамы смонтирован приводной (турасный) вал с двумя ведущими звездочками 5 цепей и предохранительной муфтой предельного момента, в задней – натяжные звездочки 10 цепей с винтовым натяжным устройством. На раме установлены также промежуточные ролики 11, поддерживающие рабочие ветви цепей и уменьшающие провисание их холостых ветвей. Для увеличения глубины копания раму рабочего органа удлиняют дополнительной вставкой, увеличивают длину цепей и количество скребков.
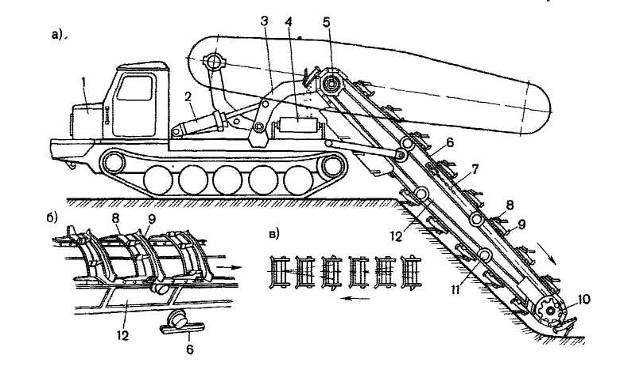
Рис. 47. Экскаватор ЭТЦ-252А:
а-общтй вид; б-рабочий орган; в-схема размещения скребков
Скребки на рабочем органе размещены по специальной схеме (рис. 47, в), обеспечивающей наименьшую энергоемкость процесса копания. При движении тягача вперед и одновременном движении скребковой цепи относительно наклонной рамы скребки отделяют грунт от массива, а заслонки поднимают его из траншеи на высоту приводных звездочек цепи, при огибании которых грунт выгружается на поперечный (к продольной оси движения машины) ленточный конвейер 4 и отбрасывается им в сторону от траншеи. Глубина отрываемой траншеи зависит от угла наклона рамы рабочего органа и регулируется механизмом ее подъема, включающим два гидроцилиндра 2 и два рычага 3. При копании траншей с наклонными стенками на рабочем органе устанавливают активные цепные откосообразователи 7. Верхние концы цепей шарнирно прикреплены к качающемуся балансирному рычагу с центральным шарниром, нижние – к эксцентрично установленным пальцам натяжных звездочек 10 рабочего органа, сообщающих откосообразователям возвратно-поступательное движение.
Грунт, отделяемый цепями от целика, обрушивается на дно траншеи, откуда выносится на поверхность транспортирующими заслонками рабочего органа. Сменное рабочее оборудование экскаватора для разработки мерзлых грунтов, промерзших на глубину до 1,2м, монтируется на основной раме рабочего органа и представляет собой скребковый рабочий орган, оснащенный зубьями с износостойкой наплавкой.
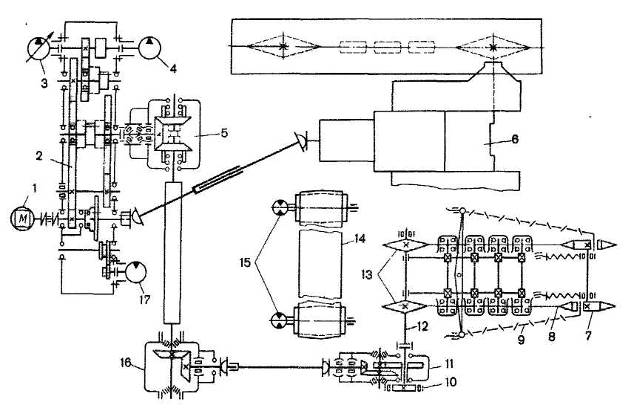
Рис. 48. кинематическая схема экскаватора ЭТЦ-252А
Кинематическая схема экскаватора ЭТЦ-252А показана на рис. 48. Вращение приводному (турасному) валу 12 с ведущими звездочками 13 цепей 8 передается от дизеля 1 через муфту сцепления, распределительную коробку 2, редуктор реверса 5, конический редуктор 16, верхний редуктор 11 и пневмокамерную муфту 10 предельного момента. С помощью редуктора реверса можно изменять направление движения цепей рабочего органа. Движение цепным откосообразователям 9 сообщается от натяжных звездочек 7 рабочего органа. Автономный привод ведущих концевых барабанов ленточного конвейера 14 осуществляется от гидромотора 15 через встроенный в каждый барабан планетарный редуктор. Питаются гидромоторы конвейера от нерегулируемого насоса 4. Регулируемый насос 3 питает гидромотор 17, который обеспечивает передвижение экскаватора при копании траншей и бесступенчатое регулирование скоростей рабочего хода в диапазоне 5...150 м/ч. Для транспортного передвижения используется механическая трансмиссия базового трактора 6.
Экскаватор ЭТЦ-208В на базе гусеничного трактора Т-130МГ-1 предназначен для рытья траншей прямоугольного профиля глубиной до 2 м и шириной 0,6 м в однородных мерзлых грунтах и устойчивых немерзлых грунтах II...IV категорий при выполнении общестроительных работ.
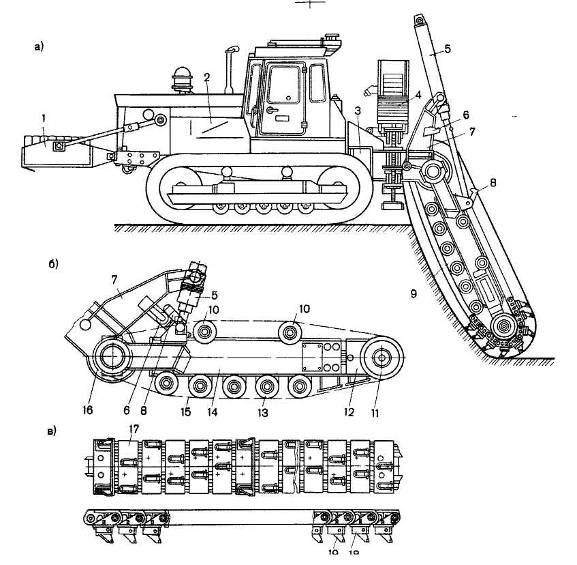
Рис. 49. Экскаватор ЭТЦ-208В:
а-общий вид; б-рама рабочего органа; в-рабочая цепь
Экскаватор (рис. 49) состоит из базового трактора, 2, спереди которого навешен противовес 1, сзади установлены цепной рабочий орган 9 с двумя гидроцилиндрами 5 подъема, опускания, редуктор 3 привода рабочего органа и боковой скребковый конвейер 4 для эвакуации разработанного грунта в сторону от траншеи. Рабочий орган, конвейер и механизм подъема с кронштейном 7 прикреплены к корпусу редуктора. Цепной рабочий орган разрабатывает грунт, выносит его из забоя и состоит (рис. 49, б, в) из рабочей цепи 15, установленной на приводной 16 и натяжной 11 звездочках, рамы 14 с устройством 12 для натяжения цепи, верхних 10 и нижних 13 поддерживающих цепь роликов.
Цепь рабочего органа состоит из звеньев гусеничной цепи трактора Т-100М, к которым прикреплены специальные каретки 17 с карманами 18 для крепления зубьев 19, оснащенных пластинками из твердого сплава. Зубья на цепи расставлены по специальной схеме, способствующей снижению энергоемкости копания и динамических нагрузок на цепь. Вращение приводной звездочке цепи сообщается от вала отбора мощности базового трактора через редуктор 3 с дисковой фрикционной муфтой предельного момента. Редуктор обеспечивает две скорости (1,7 и 2,4 м/с) и реверс рабочей цепи. Через него осуществляется также привод рабочего передвижения машины при копании траншей. Получение рабочих скоростей передвижения экскаватора обеспечивает гидромеханический ходоуменьшитель, состоящий их гидромотора, червячного и цилиндрического редукторов.
Скорости рабочего передвижения машины изменяют ступенчато с помощью тракторной коробки передач, а в пределах каждой скорости бесступенчато путем изменения частоты вращения гидромотора дросселированием рабочей жидкости, поступающей к гидромотору. Транспортные скорости передвижения экскаватора обеспечиваются тракторной коробкой передач. Боковой скребковый конвейер приводится в действие гидромотором через планетарный редуктор и переводится из транспортного положения в рабочее и обратно индивидуальным гидроцилиндром. Для фиксации рабочего органа в транспортном положении при переездах машины служат неподвижный и подвижный крюки 6 и 8.
Модификации экскаватора ЭТЦ-208В – экскаваторы ЭТЦ-208Д и ЭТЦ-208Э (модернизированный вариант ЭТЦ-208Д) оснащаются баровыми рабочими органами и применяются для нарезания щелей в однородных мерзлых грунтах без включения скальных пород.
Эксплуатационная производительность цепных траншейных экскаваторов со скребковым рабочим органом (м3/ч)

где bс – ширина скребка, м; hс – высота скребка, м; vц – скорость движения скребковой цепи, м/с; Кн – коэффициент заполнения экскавационных емкостей (Кн = 0,35...0,75 и зависит от характера грунта, толщины срезаемой стружки, длины и формы забоя, угла наклона рабочей цепи к горизонту); Кв – коэффициент использования машины по времени (Кв = 0,5...0,65); КР – коэффициент разрыхления грунта в процессе разработки (КР = 1,1...1.5).
Лекция 14. Роторные траншейные экскаваторы
Роторные траншейные экскаваторы представляют собой навесное или полуприцепное к переоборудованному гусеничному трактору или специальному тягачу землеройное оборудование и предназначены для разработки траншей прямоугольного и трапецеидального профиля в однородных немерзлых грунтах I...IV категорий, не содержащих крупных каменистых включений (до 300 мм), а также в мерзлых грунтах при различной глубине промерзания верхнего слоя.
Глубина отрываемых ЭТР траншей определяется диаметром ротора. Увеличение глубины копания связано со значительным возрастанием диаметра и массы ротора и поэтому рациональный предел глубины копания для ЭТР не превышает 3 м. Передача энергии от дизеля тягача к основным исполнительным механизмам (роторному колесу, отвальному конвейеру, гусеничному движителю) и вспомогательному оборудованию (механизмам подъема рабочего органа и конвейера) осуществляется с помощью механической, гидравлической или электромеханической трансмиссии.
Промышленность выпускает роторные траншейные экскаваторы ЭТР-134, ЭТР-204А, ЭТР-223А, ЭТР-224А, ЭТР-253А и ЭТР-254А. Экскаваторы ЭТР-204А и ЭТР-223А способны разрабатывать мерзлые грунты с промерзанием на глубину до 1м, ЭТР-224А – до 1,2м, ЭТР-134 – до 1,3м, ЭТР-253А и ЭТР-254А – до 2,5м.
. 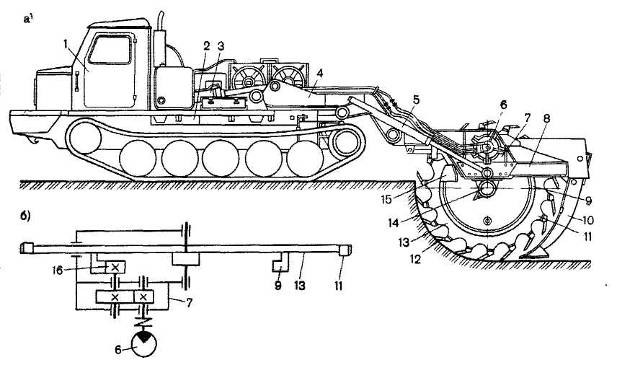
Рис. 50. Экскаватор ЭТР-134:
а-общий вид; б-кинематическая схема привода рабочего органа
Экскаватор ЭТР-134 на базе трактора 1 модели ТТ- 4 (рис. 50) предназначен для рытья траншей и щелей шириной 0,28м и глубиной до 1,3м в мерзлых и плотных грунтах. Навесное рабочее оборудование экскаватора включает дисковый ротор с гидравлическим приводом, раму 8 с зачистным устройством 10 и гидравлический механизм подъема – опускания ротора. Ротор состоит из диска 13, на котором с помощью зубодержателей 11 установлены 18 зубьев 12, разрабатывающих грунт и выносящих его на поверхность. Ротор установлен на опоре 14 рамы и приводится во вращение от высокомоментного гидромотора 6 через зубчатый редуктор 7. Выходная шестерня 16 редуктора входит в зацепление с зубчатым венцом 9, жестко прикрепленным к диску ротора.
Рабочий орган не имеет специального оборудования для транспортирования разработанного грунта; вынесенный зубьями на поверхность грунт отодвигается в обе стороны от бровки траншеи плужками 15 рамы 8 и располагается валиком вдоль отрываемой траншеи. Подъем и опускание рабочего органа осуществляется гидравлическим подъемным механизмом, включающим два гидроцилиндра 3, раму 4 и телескопические тяги 5. Рабочие скорости экскаватора при копании траншей обеспечиваются гидромеханическим ходоуменьшителем и бесступенчато регулируются в диапазоне 10...480 м/ч.
Для получения транспортных скоростей передвижения машины (2,2...9,8 км/ч) используется тракторная коробка передач. Привод насосов гидросистемы экскаватора и гидромотора ходоуменьшителя осуществляется от раздаточной коробки 2. Ряд узлов трансмиссии экскаваторов ЭТР-134 и ЭТЦ-252А унифицирован.
Экскаваторы ЭТР-204А, ЭТР-223А, ЭТР-224А предназначены для рытья траншей прямоугольного и трапецеидального профиля в грунтах I...IV категорий, а также в мерзлых грунтах при глубине промерзания верхнего слоя не более 1,0...1,2 м. Они представляют собой группу максимально унифицированных машин с одинаковой кинематической схемой и механическим приводом рабочего органа, которые различаются между собой в основном размерами разрабатываемых траншей и базируются на тягаче, выполненном с использованием узлов трактора Т-130МГ.
Экскаватор ЭТР-204А (рис. 51, а) состоит из гусеничного тягача 1 и навесного рабочего органа для рытья траншей и отброса грунта, шарнирно соединенных между собой в вертикальной плоскости. Рабочий орган машины – опирающийся на четыре пары роликов 13 жесткий ротор 12 с 14 ковшами 11, внутри которого помещен поперечный двухсекционный ленточный конвейер 10, состоящий из горизонтальной и наклонной (откидной) секций. Позади ротора установлен зачистной башмак 9 для зачистки и сглаживания дна траншей. У тягача уширен и удлинен гусеничный движитель для повышения устойчивости и проходимости машины и исключения возможного обрушения стенок траншеи при движении над ней тягача.
В трансмиссию тягача включен гидромеханический ходоуменьшитель для бесступенчатого регулирования рабочих скоростей движения машины при копании траншей. На тягаче установлена дополнительная рама 2 с размещенными на ней механизмами привода 7 и подъема – опускания рабочего органа.
Дата добавления: 2015-03-07; просмотров: 4123;