Электромагнитный момент асинхронного двигателя. Механические характеристики.
Подставив в выражение (3.55) значение тока  из (3.44), найдем зависимость электромагнитного момента от параметров двигателя:
из (3.44), найдем зависимость электромагнитного момента от параметров двигателя:
 (3.56)
(3.56)
Так как параметры  ,
,  ,
,  и
и  асинхронного двигателя при работе с различными частотами вращения (скольжениями s) остаются практически постоянными, так же как и синхронная частота вращения w1 (то величина электромагнитного (вращающего) момента М изменяется лишь от напряжения сети U1, и скольжения s.
асинхронного двигателя при работе с различными частотами вращения (скольжениями s) остаются практически постоянными, так же как и синхронная частота вращения w1 (то величина электромагнитного (вращающего) момента М изменяется лишь от напряжения сети U1, и скольжения s.
На рис. 3.16 построена зависимость вращающего момента асинхронной машины от скольжения при постоянном напряжении U1. Там же указаны зоны, соответствующие различным режимам работы асинхронной машины. В диапазоне скольжений 0<s<1 машина работает в режиме двигателя, в диапазоне s<0 – в режиме генератора, в диапазоне s>1 – в режиме тормоза.
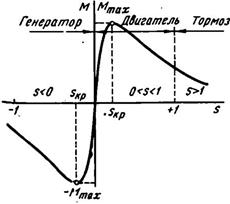
Рис. 3.16. Режимы работы асинхронной машины
Величина вращающего момента асинхронной машины пропорциональна квадрату напряжения –  . Этого нельзя забывать при работе с асинхронными машинами, ибо снижение напряжения хотя бы на 20% от номинального
. Этого нельзя забывать при работе с асинхронными машинами, ибо снижение напряжения хотя бы на 20% от номинального  ведет к уменьшению момента на 36%
ведет к уменьшению момента на 36% 
Скольжение s однозначно связано с частотой вращения n2, поэтому выражение (3.56) является уравнением механической характеристики асинхронного двигателя  при
при  .
.
Механические характеристики асинхронного двигателя выражаются либо как при , либо как  при , либо как
при , либо как  при . Различные виды механических характеристик одного и того же двигателя представлены на рис. 3.17 и рис. 3.18. Для того чтобы их понять, достаточно вспомнить, что s=0 соответствует n2=nl, a s=1 соответствует n2=0.
при . Различные виды механических характеристик одного и того же двигателя представлены на рис. 3.17 и рис. 3.18. Для того чтобы их понять, достаточно вспомнить, что s=0 соответствует n2=nl, a s=1 соответствует n2=0.
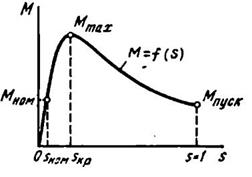
Рис.3.17. Зависимость момента от скольжения
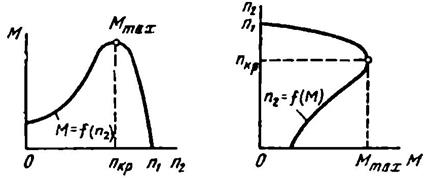
Рис 3.18. Механические характеристики асинхронного двигателя
Рассматривая характеристику при (см. рис. 3.17) нетрудно заметить, что при s=0 (n2=nl) момент M=0. Затем с увеличением s (уменьшением n2) момент растет, достигает максимума Mmax при критическом скольжении sкр (критической частоте вращения nкр), а затем уменьшается.
Продифференцировав выражение момента (3.56) по скольжению и приравняв производную к нулю, найдем соответствующее максимальному моменту – критическое скольжение:
 (3.57)
(3.57)
Или, пренебрегая r1,которое обычно мало,
 (3.58)
(3.58)
Подставив  из (3.57) в (3.56) найдем выражение максимального вращающего момента асинхронного двигателя
из (3.57) в (3.56) найдем выражение максимального вращающего момента асинхронного двигателя
 (3.59)
(3.59)
Отношение максимального момента  к номинальному
к номинальному  характеризует перегрузочную способность асинхронных двигателей. Для современных двигателей
характеризует перегрузочную способность асинхронных двигателей. Для современных двигателей  .
.
Из анализа выражений (3.58) и (3.59) следует, что величина максимального момента асинхронного двигателя не зависит от активного сопротивления ротора . В то же время величина критического скольжения , при котором момент достигает максимальной величины, прямо пропорциональна активному сопротивлению , т.е. 
Это значит, что с увеличением механическая характеристика двигателя смещается в сторону больших скольжений (рис. 8.23). При этом с изменением до определенной величины  будет увеличиваться начальный пусковой момент Мпуск (МпускI < МпускII < МпускIII), т.е. момент при s=1 (n2=0). Выражение начального пускового момента можно получить из (8.45) путем подстановки в него s=1:
будет увеличиваться начальный пусковой момент Мпуск (МпускI < МпускII < МпускIII), т.е. момент при s=1 (n2=0). Выражение начального пускового момента можно получить из (8.45) путем подстановки в него s=1:
 (3.60)
(3.60)
Начальный пусковой момент  характеризует пусковые свойства асинхронного двигателя. Чем больше пусковой момент и меньше пусковой ток, тем лучше пусковые свойства двигателя.
характеризует пусковые свойства асинхронного двигателя. Чем больше пусковой момент и меньше пусковой ток, тем лучше пусковые свойства двигателя.
У современных трехфазных асинхронных двигателей с короткозамкнутым ротором, кратность пускового момента – отношение пускового момента к номинальному  – обычно составляет
– обычно составляет  , а кратность пускового тока
, а кратность пускового тока  . Меньшую кратность пускового тока имеют двигатели малой мощности:
. Меньшую кратность пускового тока имеют двигатели малой мощности:
Для приводов большой мощности, требующих значительных пусковых моментов при сравнительно небольших токах, обычно применяют асинхронные двигатели с фазными роторами. На время пуска в цепь ротора таких двигателей с помощью контактных колец и щеток вводят (см. рис. 8.6, б) сопротивления Rдоб, тем самым смещая механическую характеристику M=f(s) в сторону больших скольжений (рис. 3.19). Это способствует увеличению пускового момента и одновременно уменьшению пускового тока  . По мере разгона ротора двигателя сопротивление Rдоб постепенно выводится, а при достижении ротором номинальной частоты вращения обмотка ротора замыкается накоротко (Rдоб = 0).
. По мере разгона ротора двигателя сопротивление Rдоб постепенно выводится, а при достижении ротором номинальной частоты вращения обмотка ротора замыкается накоротко (Rдоб = 0).
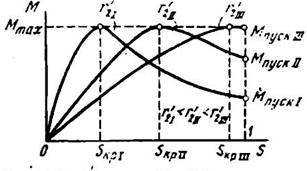
Рис. 3.19. Графики зависимости момента от скольжения для различных значений активного сопротивления якоря асинхронного двигателя
Максимальный пусковой момент может быть достигнут при сопротивлении Rдоб, смещающем максимум кривой M=f(s) до величины, соответствующей s=1. Добавочное сопротивление, отвечающее этому условию:
 (3.61)
(3.61)
Дата добавления: 2015-02-23; просмотров: 1792;