Регулирование частоты вращения.
Частота вращения ротора асинхронного двигателя определяется выражением:
 ,
,
из которого следует, что частоту вращения асинхронных двигателей можно регулировать изменением какой-либо из трех величин: скольжения, частоты тока в статоре или числа пар полюсов в обмотке статора.
Регулирование частоты вращения изменением скольжения возможно тремя способами: изменением величины подводимого к обмотке статора напряжения U1, нарушением симметрии этого напряжения и изменением активного сопротивления цепи ротора.
Регулирование частоты вращения изменением величины напряжения U1. Возможность этого способа регулирования подтверждается графиками M=f(s), построенными для разных значений U1 (рис. 3.22). При неизменной нагрузке на двигатель MС=const увеличение U1 вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшой, что объясняется узкой зоной устойчивой работы двигателя (см. раздел 3.1.10), ограниченной критическим скольжением и недопустимостью значительного отклонения U1 от номинального значения. Последнее обусловлено тем, что при U1 < U1ном снижается перегрузочная способность двигателя Mmax/Mном (см. , раздел 3.1.9), а при U1 > U1ном возникает опасность чрезмерного перегрева двигателя, вызванного увеличением электрических и магнитных потерь.
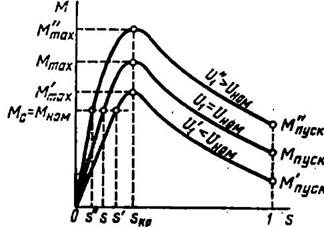
Рис. 3.22. Механические характеристики асинхронного двигателя при разных напряжениях
Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии трехфазной системы напряжении вращающееся поле статора становится эллиптическим (см. § 9.2). При этом оно приобретает обратную составляющую, которая создает момент, направленный встречно электромагнитному вращающему моменту двигателя, что ведет к уменьшению результирующего момента.
Механические характеристики двигателя при этом способе регулирования располагаются в зоне между характеристикой при симметричном трехфазном питании двигателя (рис. 3.23.а, кривая 1) и характеристикой при однофазном питании (кривая 2) – пределом несимметрии трехфазного напряжения (см. §9.1).
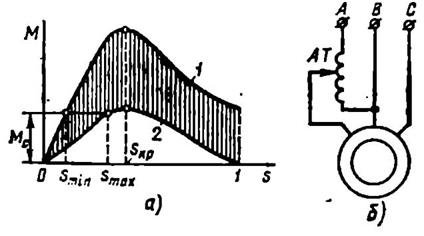
Рис. 3.23. Регулирование частоты вращения асинхронного двигателя нарушением симметрии подводимого напряжения
Регулирование несимметрии можно осуществить посредством однофазного регулировочного автотрансформатора АТ (рис. 3.23.б). При уменьшении напряжения на выходе АТ несимиетрия напряжения увеличивается, а частота вращения ротора уменьшается.
Недостатки этого метода – узкая зона регулирования (  на рис. 3.19,а) и ухудшение к.п.д. двигателя по мере увеличения несимметрии напряжения.
на рис. 3.19,а) и ухудшение к.п.д. двигателя по мере увеличения несимметрии напряжения.
Рассмотренный способ обычно применяют в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования возможен лишь в асинхронных двигателях с фазным ротором.
Концы фаз обмотки ротора у этих двигателей через контактные кольца и щетки выведены наружу, что дает возможность включить последовательно с обмоткой ротора регулировочный реостат Rдоб и с его помощью изменять активное сопротивление цепи ротора (см. рис. 3.6.б)
Механические характеристики асинхронного двигателя, построенные для разных значений активного сопротивления цепи ротора, показывают, что с увеличением активного сопротивления возрастает скольжение, соответствующее заданному нагрузочному моменту сопротивления Мс (рис. 3.20). Частота вращения при этом уменьшается.
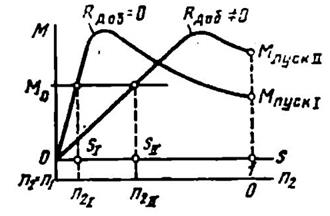
Рис. 3.24 Влияние активного сопротивления в цепи ротора на частоту вращения асинхронного двигателя
Зависимость скольжения (частоты вращения) от активного сопротивления цепи ротора выражается формулой, полученной преобразованием (3.55) и введением величины Rдоб:
 (3.74)
(3.74)
Данный способ регулирования имеет два существенных недостатка: 1) применение его ограничено лишь двигателями с фазным ротором, которые почти не применяются в автоматике; 2) он сопровождается значительными электрическими потерями в цепи ротора  . величина которых пропорциональна скольжению [см. (3.1.9)]. Кроме того, рост потерь в цепи ротора при уменьшении частоты вращения у двигателей с самовентиляцией сопровождается ухудшением условий охлаждения, так как с понижением частоты вращения уменьшается количество охлаждающего воздуха, прогоняемого вентилятором через двигатель.
. величина которых пропорциональна скольжению [см. (3.1.9)]. Кроме того, рост потерь в цепи ротора при уменьшении частоты вращения у двигателей с самовентиляцией сопровождается ухудшением условий охлаждения, так как с понижением частоты вращения уменьшается количество охлаждающего воздуха, прогоняемого вентилятором через двигатель.
Однако, несмотря на указанные недостатки, рассмотренный способ регулирования имеет существенные достоинства – плавность регулирования в широком диапазоне частот вращения и улучшение пусковых свойств двигателя (МпускII > МпускI, IпускII < IпускI).
Регулирование частоты вращения изменением частоты тока (частотное регулирование). Этот способ регулирования основан на изменении синхронной частоты вращения, величина которой пропорциональна частоте тока в обмотке статора (n1  f1). Для осуществления такого регулирования необходим источник питания двигателя с регулируемой частотой тока f1. В качестве источника могут применяться электромашинные и полупроводниковые преобразователи частоты.
f1). Для осуществления такого регулирования необходим источник питания двигателя с регулируемой частотой тока f1. В качестве источника могут применяться электромашинные и полупроводниковые преобразователи частоты.
Необходимо иметь в виду, что с изменением f1 меняется и максимальный момент двигателя [см. (3.59)]. Поэтому для сохранения перегрузочной способности, коэффициента мощности и к.п.д. двигателя на требуемом уровне необходимо одновременно с изменением f1 изменять и напряжение питания U1.
Характер одновременного изменения f1 и U1 определяется уравнением:
 (3.75)
(3.75)
где U1 и М – напряжение и электромагнитный момент при частоте f1;  и
и  – напряжение и момент при частоте
– напряжение и момент при частоте  .
.
Если регулирование частоты вращения двигателя производится при условии постоянства нагрузочного момента (  ), то подводимое напряжение необходимо изменять пропорционально изменению частоты тока:
), то подводимое напряжение необходимо изменять пропорционально изменению частоты тока:
 (3.76)
(3.76)
Частотное регулирование позволяет плавно изменять частоту вращения двигателей в широком диапазоне (до 12:1). Однако источники питания с регулируемой частотой тока несколько удорожают установку, что иногда является причиной, ограничивающей применение этого способа регулирования частоты вращения. Поэтому частотное регулирование до недавнего времени ограничивалось применением для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговые двигатели).
За последние годы благодаря развитию силовой полупроводниковой техники созданы устройства частотного управления, технико-экономические показатели которых позволяют применять их для индивидуального регулирования асинхронными двигателями. Использование асинхронных двигателей, укомплектованных такими устройствами, весьма перспективно, особенно в пожаро- и взрывоопасных средах (химическая и нефтеперерабатывающая промышленность), где коллекторные двигатели неприменимы из-за наличия щеточного контакта.
Регулирование частоты вращения изменением числа полюсов обмотки статора.Этот способ регулирования дает ступенчатое изменение частоты вращения. Он может осуществляться двумя путями, но только в двигателях с короткозамкнутым ротором.
Первый способ состоит в том, что в пазы статора укладывают две электрически не связанные обмотки с разным числом пар полюсов, например, обмотка с р=1 (n1 = 3000об/мин) и обмотка с р=2 (n1=1500 об/мин). Включая в сеть разные обмотки, меняют и частоту вращения двигателя.
Второй способ предусматривает размещение на статоре одной обмотки, схема которой позволяет путем переключений изменять число пар полюсов (рис. 3.21).
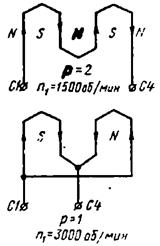
Рис. 3.25. Изменение числа полюсов в обмотке статора
Применение двух обмоток статора с разным числом полюсов увеличивает массу и габариты машины, а также приводит к неполному использованию двигателя при любой частоте вращения. Поэтому чаще применяют однообмоточные многоскоростные двигатели с одной полюсно-переключаемой обмоткой, допускающей получение до четырех различных чисел полюсов, например восемь, шесть, четыре, два. При частоте тока 50 Гц в таком двигателе возможно получение четырех синхронных частот вращения: 750, 1000, 1500 и 3000 об/мин.
Дата добавления: 2015-02-23; просмотров: 1458;