Плавучие краны
Плавучий кран — это грузоподъемный кран, установленный стационарно на специальном судне, как самоходном, так и не самоходном, и предназначенный для выполнения подъемно-перегрузочных работ.
2.1.1. Общие сведения
В отличие от других типов кранов, на плавучих — предусмотрены бытовые помещения для команды (постоянного экипажа), ремонтные и такелажные мастерские, столовые, дополнительное судовое оборудование, палубные механизмы [7], собственные силовые установки, позволяющие работать крану в автономном режиме вдали от берега. Механизмы плавучих кранов имеют, как правило, дизель-электрический привод. Возможно также питание электроэнергией с берега. В качестве движителей используются гребные винты или крыльчатые движители. Последние не требуют рулевого устройства и могут перемещать кран вперед, назад, вбок (лагом) или разворачивать на месте.
В зависимости от водных путей плавучие краны подведомственны Морскому регистру судоходства России [11] или Российскому речному регистру [9, 10].
В соответствии с требованиями Морского регистра [11] плавучие краны должны быть оборудованы всеми устройствами, предусматриваемыми для судов, т.е. должны иметь привальные брусья (деревянные балки, выступающие вдоль наружной части надводного борта судна непрерывно или частями, предохраняющие обшивку бортов от ударов о другие судна и сооружения), шпили (судовые механизмы в виде вертикальных воротов для подъема и отдачи якорей, подъема тяжестей, тяги швартовов и др.), кнехты (парные тумбы с общей плитой на палубе судна, предназначенные для закрепления на них тросов), якоря и якорные лебедки, а также средства световой и звуковой сигнализации, радиосвязи, водоотливные насосы и спасательные средства. В процессе эксплуатации на плавучем кране должен быть запас пресной воды, продуктов питания, топлива и смазочных материалов по нормам на время автономного плавания. Основные требования, предъявляемые к понтонам плавучих кранов – прочность конструкции, плавучесть и остойчивость.
В случае транспортировки по внутренним водным путям габаритная высота крана в походном состоянии должна соответствовать ГОСТ 5534 и назначаться с учетом подмостных размеров и возможности прохода под воздушными линиями электропередач.
По назначению краны можно классифицировать следующим образом:
Перегрузочные краны (общего назначения), предназначенные для массовых перегрузочных работ (их описание представлено в работах [2,15]). Согласно ГОСТ 5534, грузоподъемность перегрузочных плавучих кранов составляет 5, 16 и 25 тонн, максимальный вылет 30…36 м, минимальный 9…11 м, высота подъема крюка над уровнем воды 18,5…25 м, глубина опускания ниже уровня воды (например, в трюм судна) — не менее 11…20 м (в зависимости от грузоподъемности), скорости подъема 1,17…1,0 м/с (70…45 м/мин), скорость изменения вылета 0,75…1,0 м/с (45…60 м/мин), частота вращения 0,02…0,03 с-1 (1,2…1,75 об/мин) [2]. Это такие краны, как, например — «Ганц», производство Венгрии (рис. 2.1.), отечественные краны (рис. 2.2).
Краны специального назначения (большой грузоподъемности) — для перегрузки тяжеловесов, строительных, монтажных, судостроительных и аварийно-спасательных работ.
Плавучие краны, предназначенные для монтажных работ, используются при возведении гидротехнических сооружений, для работы на судостроительных и судоремонтных заводах.
Кран немецкой фирмы «Демаг» грузоподъемностью 350 тонн использовался при реконструкции ленинградских мостов, при монтаже
80-тонных портальных кранов, при переносе портальных кранов с одного района порта в другой и т.д.
Кран завода ПТО им. С. М. Кирова грузоподъемностью 250 тонн был изготовлен для монтажа нефтяных вышек на Каспийском море.
Краны «Черноморец» грузоподъемностью 100 тонн и «Богатырь» грузоподъемностью 300 тонн (рис. 2.3) удостоены Государственной премии СССР.
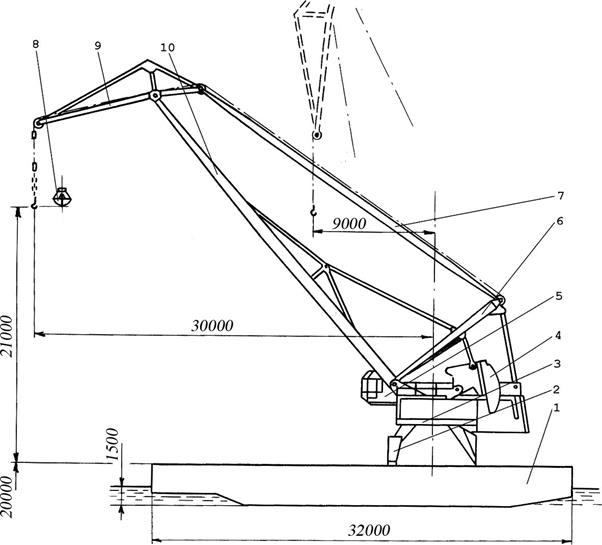 Рис. 2.1. Перегрузочный плавучий кран грузоподъемностью 16 тонн («Ганц», Венгрия): 1 – понтон; 2 – портал; 3 – поворотный круг; 4 – уравновешивающее устройство, совмещенное с тягой механизма изменения вылета; 5 – кабина; 6 – каркас; 7 – жесткая оттяжка; 8 – грейфер; 9 – хобот; 10 – стрела
Рис. 2.1. Перегрузочный плавучий кран грузоподъемностью 16 тонн («Ганц», Венгрия): 1 – понтон; 2 – портал; 3 – поворотный круг; 4 – уравновешивающее устройство, совмещенное с тягой механизма изменения вылета; 5 – кабина; 6 – каркас; 7 – жесткая оттяжка; 8 – грейфер; 9 – хобот; 10 – стрела
| ||
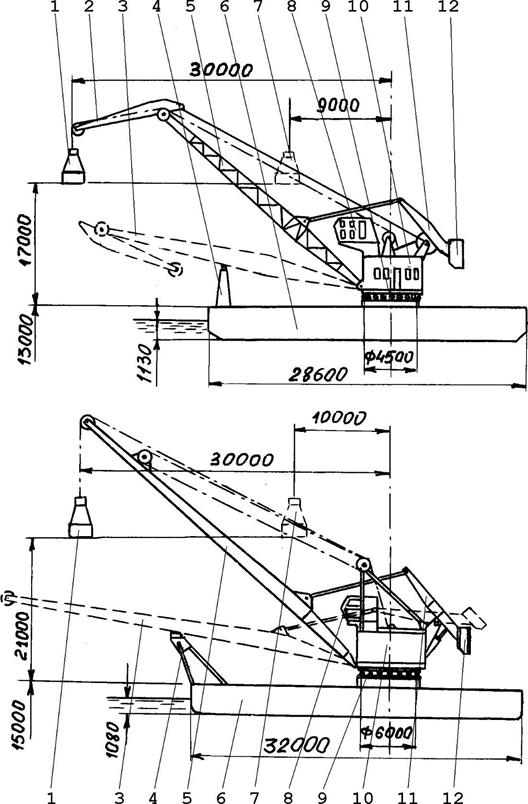
Рис. 2.2. Перегрузочные плавучие краны грузоподъемностью 5 тонн (а) и 16 тонн (б): 1 – грейфер на наибольшем вылете; 2 – хобот; 3 – стрела по-походному; 4 – упор; 5 – стрела по-рабочему; 6 – понтон; 7 – грейфер на наименьшем вылете; 8 – кабина; 9 – опорно-поворотное устройство; 10 – колонна; 11 – уравновешивающее устройство, совмещенное с механизмом изменения вылета; 12 – противовес |
Рис. 2.3. Плавучий кран «Богатырь» грузоподъемностью 300 тонн (Севастопольский завод им. С. Орджоникидзе): 1 – понтон; 2 – стрела по-походному; 3 – подвеска вспомогательного подъема; 4 – подвеска главного подъема; 5 – стрела
Кран «Витязь» (рис. 2.4) грузоподъемностью 1600 тонн применяют при работе с тяжелыми грузами, например, при установке на опоры смонтированных на берегу конструкций моста через реку. Помимо главного подъема этот кран имеет вспомогательный подъем грузоподъемностью 200 тонн. Вылет главного подъема 12 м, вспомогательного 28,5 м. Имеются плавучие краны и большей грузоподъемности.
Специальные краны, выполняющие перегрузку тяжеловесов в портах, монтажные и строительные работы при постройке судов, судоремонте и строительстве ГЭС, аварийно-спасательные работы, имеют полноповоротные верхние строения. Грузоподъемность — от 60 (кран «Астрахань») до 500 тонн, например: «Черноморца» — 100 тонн, «Севастопольца» — 140 тонн (рис. 2.5), «Богатыря» — 300 тонн, «Богатыря-М» — 500 тонн. На рис. 2.6 представлены краны «Богатырь» с различными модификациями стрел и соответствующими графиками грузоподъемности, переменной по вылету.
Специализированные краны для судоподъемных и аварийно-спасательных работ и монтажа крупногабаритных тяжеловесных конструкций, как правило, неповоротные.
 Рис. 2.4. Плавучий кран «Витязь» грузоподъемностью 1600 тонн (Севастопольский завод им. С. Орджоникидзе): 1 – понтон; 2 – лебедка изменения вылета; 3 – лебедка палубных талей грузоподъемностью 2х200 тонн, используемая при подъеме грузов 1600 тонн; 4 – лебедка вспомогательного подъема; 5 – лебедка главного подъема; 6 – судовой кран; 7 – стрела; 8 – подвески главного подъема; 9 – подвеска вспомогательного подъема
Рис. 2.4. Плавучий кран «Витязь» грузоподъемностью 1600 тонн (Севастопольский завод им. С. Орджоникидзе): 1 – понтон; 2 – лебедка изменения вылета; 3 – лебедка палубных талей грузоподъемностью 2х200 тонн, используемая при подъеме грузов 1600 тонн; 4 – лебедка вспомогательного подъема; 5 – лебедка главного подъема; 6 – судовой кран; 7 – стрела; 8 – подвески главного подъема; 9 – подвеска вспомогательного подъема
|
Рис. 2.5. Плавучий кран «Севастополец» грузоподъемностью 140 тонн (Севастопольский завод им. С. Орджоникидзе): 1 – понтон; 2 – стрела по-походному; 3 – стрела по-рабочему
|
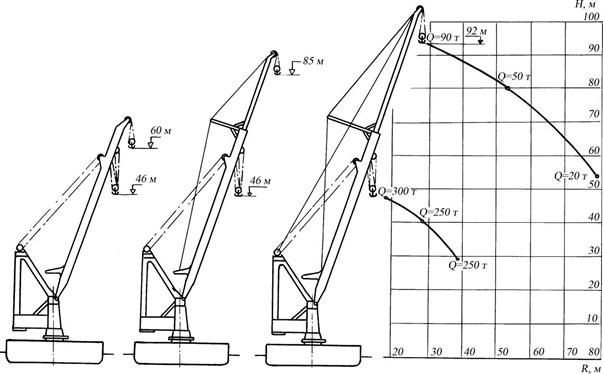
Рис. 2.6. Плавучие краны: а – «Богатырь»; б – «Богатырь-3» с дополнительной стрелой; в – «Богатырь-6» с удлиненной дополнительной стрелой; Q – допустимая грузоподъемность на вылете R; Н – высота подъема
Примерами таких кранов могут служить: «Волгарь» — 1400 тонн; «Витязь» — 1600 тонн (рис. 2.4), подъем груза весом 1600 тонн производят с привлечением лебедки трех палубных талей, «Магнус» (Magnus, ФРГ) грузоподъемностью от 200 до 1600 тонн (рис. 2.7), «Балдер» (Balder, Голландия) грузоподъемностью от 2000 до 3000 тонн (рис. 2.8).
Нефтепромысловые. Крановые суда для снабжения морских нефтепромыслов и строительства нефте- и газопромысловых сооружений на шельфе обычно имеют поворотные верхние строения, значительный вылет и высоту подъема и способны обслуживать стационарные буровые платформы. К таким кранам относятся, например, «Якуб Кязимов» — грузоподъемностью 25 тонн (рис. 2.9), «Керр-оглы» — грузоподъемностью 250 тонн [15]. В связи с освоением континентального шельфа отмечается тенденция к росту параметров кранов этой группы (грузоподъемности — до 2000…2500 тонн и более) [15].
Рис. 2.7. Плавучий кран «Магнус» грузоподъемностью 800 тонн (HDW, ФРГ): 1 – понтон; 2 – стрела по-походному; 3 – палубная лебедка; 4 – лебедка наклона гуська; 5 – подкос; 6 – стрела; 7 – гусек; 8 – подвеска главного подъема; 9 – подвеска вспомогательного подъема
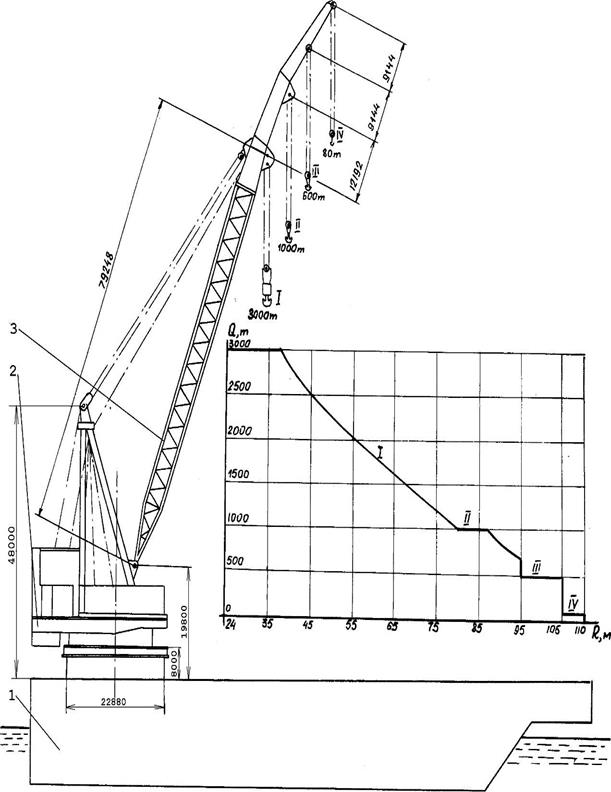
Рис. 2.8. Плавучий кран «Балдер» грузоподъемностью 3000 тонн («Густо», Голландия – (а) и график изменения допустимой грузоподъемности Q от вылета R (б)):
1 – понтон; 2 – поворотная платформа; 3 – стрела; I … IV – крюковые подвески
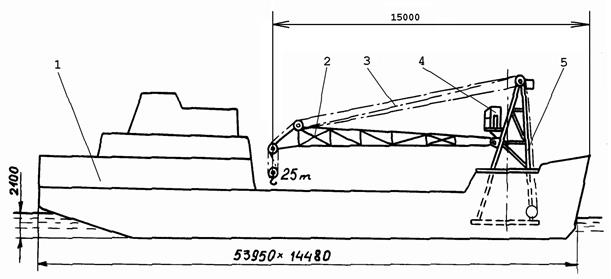
Рис. 2.9. Крановое судно «Якуб Кязимов»: 1 – понтон; 2 – стрела по-походному; 3 – уравнительный полиспаст; 4 – кабина; 5 – каркас поворотной части
В зависимости от мореходных качеств, краны можно классифицировать следующим образом:
1) портовые (для выполнения перегрузочных работ в портах и гаванях, закрытых водоемах и прибрежных морских (каботажные) и речных районах, на судостроительных и судоремонтных верфях);
2) мореходные (для работ в открытом море с возможностью длительных самостоятельных переходов).
Для отечественного краностроения характерно стремление к созданию универсальных кранов, а для зарубежного — узкоспециализированных кранов.
2.1.2. Устройство плавучих кранов
Плавучие краны состоят из верхнего строения (собственно крана) и понтона (специального или кранового судна).
Верхнее строение плавучего крана, кранового судна и т.п. – грузоподъемное сооружение, установленное на открытой палубе, рассчитанной на несение грузоподъемного устройства и груза.
Понтоны, подобно корпусам судов состоят из поперечных (шпангоутов и палубных бимсов) и продольных (киля и кильсонов) элементов, обшитых листовой сталью.
Шпангоут – криволинейная поперечная балка набора корпуса судна, обеспечивающая прочность и устойчивость бортов и днища.
Бимс – поперечная балка, связывающая правую и левую ветви шпангоута. На бимс настилают палубу.
Киль – продольная связь, устанавливаемая в диаметральной плоскости судна у днища, простирающаяся по всей его длине. Киль крупных и средних судов (внутренний вертикальный) представляет собой лист, установленный в диаметральной плоскости между настилом двойного дна и обшивкой днища. Для уменьшения качки устанавливают боковые кили нормально к наружной обшивке судна. Длина бокового киля составляет до 2 / 3 длины судна.
Кильсон – продольная связь на судах без двойного дна, устанавливаемая по днищу и соединяющая нижние части шпангоутов для совместной их работы.
По форме понтоны представляют собой параллелепипед с закругленными углами либо имеют корабельные обводы. Понтоны с прямоугольными углами имеют плоское дно и срез в кормовой (или носовой) части (рис. 2.10). Иногда кран монтируют на двух понтонах (кран-катамаран). В этих случаях каждых понтон имеет более или менее выраженный киль и форму, аналогичную форме корпусов обычных судов. Понтоны плавучих кранов делают иногда непотопляемыми, т.е. снабжают продольными и поперечными переборками. Для увеличения остойчивости плавучего крана, т.е. способности возвращаться из отклоненного положения в положение равновесия после снятия нагрузки, необходимо по возможности понизить его центр тяжести. Для этого следует избегать высоких надстроек, а жилые помещения для команды крана и склады помещать внутри понтона. На палубу выносят только рубку (кабину управления судном), камбуз (корабельную кухню) и столовую. Внутри понтона, вдоль его бортов, располагаются танки (цистерны) для дизельного топлива и пресной воды.
Плавучие краны могут быть самоходными и несамоходными. Если кран предназначен для обслуживания нескольких портов или для перемещения на значительные расстояния, то он должен быть самоходным. В этом случае применяют понтоны с корабельными обводами. Мореходные краны имеют понтоны с судовыми обводами, на ряде тяжелых кранов применены катамаранные понтоны («Кер-оглы» грузоподъемностью 250 тонн; кран фирмы «Вяртсиля», Финляндия, грузоподъемностью 1600 тонн и др.).
По конструкции верхнего строения плавучие краны можно классифицировать на неповоротные, полноповоротные и комбинированные.
Неповоротные (мачтовые, козловые, с качающимися (наклоняющимися) стрелами). Мачтовые краны (с неподвижными мачтами) имеют простую конструкцию и малую стоимость. Горизонтальное перемещение груза осуществляется при перемещении понтона, поэтому производительность таких кранов очень мала.
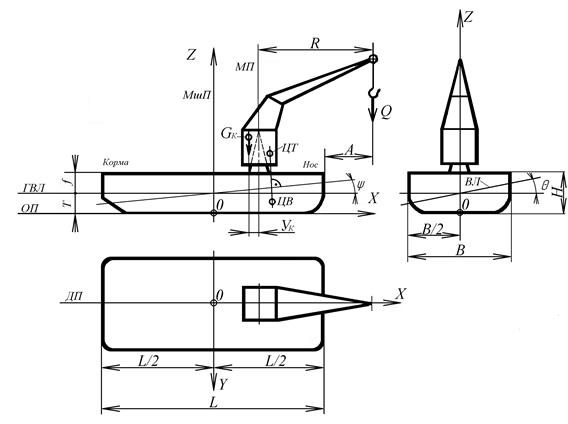
Рис. 2.10. Схема понтона плавучего крана
Для работы с тяжеловесами более пригодны плавучие краны с наклоняющимися стрелами. При переменном вылете их производительность больше, чем мачтовых. Эти краны имеют простую конструкцию, малую стоимость и большую грузоподъемность. Стрела крана состоит из двух стоек, сходящихся к вершине под острым углом, и имеет шарнирное закрепление в носовой части понтона. Подъем стрелы осуществляется жесткой штангой (гидравлическим цилиндром, зубчатой рейкой или винтовым устройством) или при помощи полиспастного механизма (например на кране «Витязь»). Стрелу в транспортном положении закрепляют на специальной опоре (рис. 2.3). Для выполнения этой операции используют стрелоподъемную и вспомогательную лебедки.
Плавучий козловой кран представляет собой обычный козловой кран, установленный на понтоне. Мост крана расположен вдоль продольной оси понтона, а его единственная консоль выступает за контуры понтона на расстояние, иногда называемое внешним вылетом. Внешний вылет обычно составляет 7…10 м. грузоподъемность плавучих козловых кранов достигает 500 тонн. Однако вследствие большой металлоемкости плавучие козловые краны в нашей стране не выпускают.
Полноповоротные (универсальные) краны бывают с поворотной платформой или колонной. В настоящее время широко распространены поворотные краны с наклоняющейся стрелой. Они наиболее производительны. Их стрелы не только наклоняются, но и вращаются вокруг вертикальной оси. Грузоподъемность поворотных кранов изменяется в широких пределах и может достигать сотен тонн.
К полноповоротным кранам относятся кран «Богатырь» грузоподъемностью 300 тонн и внешним вылетом 10,4 м при высоте подъема главного крюка (гака) над уровнем моря 40 м, а также морское транспортно-монтажное судно «Илья Муромец». Последнее имеет грузоподъемность 2×300 тонн на внешнем вылете 31 м. Высота кранового судна с поднятой стрелой 110 м. Эти краны способны совершать переходы по морю при шторме 6…7 баллов и ветре 9 баллов. Автономность плавания 20 суток. Скорость хода крана «Богатырь» 6 узлов, а кранового судна «Илья Муромец» 9 узлов. Оба судна оборудованы комплексом механизмов и приспособлений, обеспечивающих высокий уровень механизации основных и вспомогательных процессов. В транспортном положении стрелы обоих описанных судов укладывают на специальные опоры и закрепляют.
Комбинированные. К ним можно отнести, например, плавучие козловые краны, по мосту которых перемещается поворотный кран.
Преобладающий тип стрелового устройства плавучих кранов — прямая стрела с уравнительным полиспастом; реже применяют шарнирно-сочлененные стреловые устройства, однако их использование сопряжено с трудностями укладки по-походному.
Для исключения запрокидывания прямых стрел морских кранов при волнении, под действием сил инерции и ветра, а также при обрыве и сбросе груза стрелы оснащают предохранительными устройствами в виде ограничительных упоров или специальных систем уравновешивания [15]. У кранов «Магнус» стрела с грузом удерживается жестким подкосом.
По мере развития конструкций стрел был осуществлен переход от решетчатых и безраскосных стрел к сплошностенным (коробчатым, реже — трубчатым) стрелам в балочном или вантовом исполнении. На кранах последних лет выпуска чаще применяют листовые коробчатые стрелы. Известны, однако, решетчатые стрелы некоторых зарубежных кранов очень большой грузоподъемности (кран «Балдер», см. рис. 2.8). При модернизации кранов базовые стрелы часто удлиняют дополнительными вантовыми стрелами (см. рис. 2.6), что позволяет значительно увеличить наибольшие вылет и высоту подъема и одновременно обеспечить широкую унификацию с базовой моделью.
Основные типы опорно-поворотных устройств плавучих кранов — поворотная и неповоротная колонна, многокатковый поворотный круг, опорно-поворотный круг в виде двухрядного роликового подшипника. Отмечается тенденция к применению опорно-поворотных кругов в виде роликовых подшипников на кранах грузоподъемностью до 500 тонн. На более тяжелых кранах пока используют многокатковые поворотные круги, ведутся работы по созданию для таких кранов сегментных роликовых подшипников [15].
Механизмы подъема, применяемые на плавучих кранах — грейферные лебедки с независимыми барабанами и дифференциальными переключателями. Согласно ГОСТ 5534, предусмотрена уменьшенная скорость посадки грейфера на груз, составляющая 20…30 % основной скорости. Возможна замена грейфера крюковой подвеской.
Механизмы поворота (один или два) чаще имеют цилиндроконические редукторы с многодисковыми муфтами предельного момента и открытую зубчатую или цевочную передачу.
Механизм изменения вылета — секторный с установкой секторов на рычаге противовеса или гидравлический с гидроцилиндром, соединенным с платформой, и штоком, соединенным с рычагом противовеса. Известны краны с винтовым механизмом изменения вылета [15]. Конструкции механизмов изменения вылета представлены в разделе 1 «Портальные краны».
Плавучие перегрузочные грейферные краны в речных и морских портах эксплуатируют весьма интенсивно. Для механизмов подъема значения ПВ достигают 75…80 %, механизмов поворота — 75 %, механизмов изменения вылета — 50 %, число включений в час — 600 [15].
2.1.3. Особенности расчета
Геометрия понтона.При проектировании и расчете [6] понтон рассматривают в трех взаимно перпендикулярных плоскостях (см. рис. 2.10). Основной плоскостью называется горизонтальная плоскость, касательная к днищу понтона. Одна из вертикальных плоскостей, так называемая диаметральная плоскость, проходит вдоль понтона и делит его на равные части. Линию пересечения основной и диаметральной плоскостей принимают за ось X. Другую вертикальную плоскость проводят через середину длины понтона и называют плоскостью мидель-шпангоута, или миделевой. Линию пересечения основной и миделевой плоскостей принимают за ось Y, а линию пересечения миделевой и диаметральной плоскостей – за ось Z.
Плоскость, параллельную плоскости миделя и проходящую через ось вращения поворотного крана, называют медиальной. Линии пересечения поверхности корпуса понтона с плоскостями, параллельными плоскости миделя, называют шпангоутами (так называют и поперечные элементы судна, образующие каркас его корпуса). Линии пересечения поверхности корпуса понтона с плоскостями, параллельными основной плоскости, называют ватерлиниями. Такое же название имеет след поверхности воды на корпусе понтона.
Так как понтон, находящийся на воде, может быть наклонен, то полученную при этом ватерлинию называют действующей. Плоскость действующей ватерлинии, непараллельная плоскостям остальных ватерлиний, делит понтон на две части: надводную и подводную. Ватерлиния, соответствующая положению на воде крана без груза, уравновешенного таким образом, что основная его плоскость параллельна поверхности воды, называется главной ватерлинией.
Наклон судна на нос или корму называют дифферентом, а наклон судна на правый или левый борт – креном. Угол ψ (см. рис. 2.10) между действующей и главной ватерлиниями в диаметральной плоскости называют углом дифферента, а угол θ между этими же линиями в плоскости миделя — углом крена. При дифференте на нос и при крене в сторону стрелы углы ψ и θ считаются положительными.
Длину L понтона измеряют обычно по главной ватерлинии, расчетную ширину B понтона — в наиболее широком месте понтона по ватерлинии, а расчетную высоту H борта — от основной плоскости до бортовой линии палубы (см. рис. 2.10). Расстояние от основной плоскости до действующей ватерлинии называют осадкой Т понтона, которая имеет разные значения у носа понтона ТH и у кормы ТK. Разность значений ТH – TК называется дифферентом. Разность между высотой и осадкой Н – T называют высотой f надводного борта. Если форма понтона не представляет собой параллелепипеда, т.е. имеет плавные обводы, то для расчетов составляют так называемый теоретический чертеж, определяющий внешнюю форму корпуса (несколько сечений по шпангоутам). При прямоугольных понтонах нет необходимости в составлении такого чертежа.
Объем V подводной части понтона называется объемным водоизмещением. Центр тяжести этого объема называется центром величины и обозначается ЦВ. Масса воды в объеме V называется массовым водоизмещением D.
Остойчивость плавучих кранов. Остойчивость — способность судна возвращаться в положение равновесия после прекращения действия сил, вызывающих его наклонение.
Особенности расчета остойчивости плавучих кранов в значительной степени сводятся к учету влияния крена и дифферента. Кран без груза должен иметь дифферент на корму, а с грузом — на нос. Если стрела расположена в медиальной плоскости без груза, кран должен иметь крен в сторону противовеса, а с грузом — в сторону груза. Изменение вылета за счет крена или дифферента может составить несколько метров. За расчетный вылет принимают вылет, который имеет кран при горизонтальном положении понтона.
Для крана с грузом поворотная часть крана с противовесом создает момент, который частично уравновешивает грузовой момент и называется уравновешивающим (см. рис. 2.10): MУ = GKyK,где GK — вес верхнего строения; yK — расстояние от оси вращения крана до центра тяжести верхнего строения (с учетом противовесов).
Для кранов с подвижными противовесами уравновешивающий момент определяют как сумму моментов от весов верхнего строения и противовесов.
Грузовой момент MГ = GR,где G — вес груза с крюковой подвеской; R — вылет стрелы. Отношение уравновешивающего момента к грузовому называется коэффициентом уравновешивания φ = МУ / МГ.
Для определения кренящего и дифферентующего моментов рассмотрим рис. 2.11, на котором изображены понтон и стрела в плане. Вес поворотной части кранас грузом GK приложен на расстоянии e от оси O1 вращения стрелы. Действие веса GK на плече e можно заменить действием вертикальной силы GK в точке O1 и моментом GKe в плоскости стрелы. Вес понтона с балластом G0 приложен в точке O2. Кроме того, на кран действует вертикальный момент от ветровой нагрузки, имеющий составляющие относительно соответствующих осей MВХ и MВY. Тогда кренящий момент определяется по зависимости вида MK = MX = GK e cos φ + MBX, а дифферентующий момент MД = МУ = GК e sin φ + MВY.
Для определения восстанавливающего момента рассмотрим рис. 2.12, на котором показано сечение понтона по плоскости миделя в положениях до и после приложения кренящего момента. Центр тяжести крана с понтоном обозначен ЦТ. На кран, находящийся в состоянии покоя, действуют вертикальные силы, имеющие равнодействующую N, и выталкивающая сила D = Vρg, где V — вытесненный объем; ρ — плотность воды; g — ускорение свободного падения. Согласно закону Архимеда, D = N.
В состоянии равновесия силы N и D действуют по одной вертикали, проходящей через центр тяжести и центр величины и называемой осью плавания. В этом случае угол крена может иметь некоторое значение θ (см.рис. 2.10).
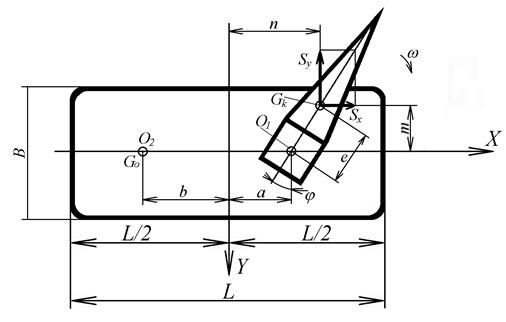
Рис. 2.11. Схема к определению кренящего и дифферентующего моментов
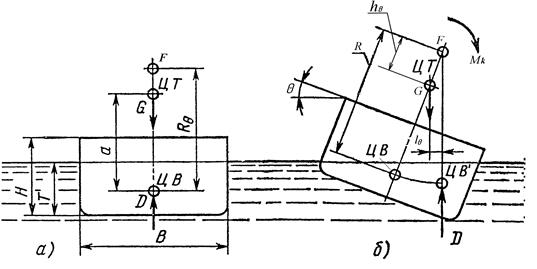
Рис. 2.12. Схема положения понтона до (а) и после (б) приложения кренящего момента
Допустим, что к крану приложен статический кренящий момент МК, вызываемый, например, весом груза G на конце стрелы крана. При этом центр величины смещается. Изменением сил D и G по сравнению с состоянием равновесия можно пренебречь, так как вес груза существенно меньше веса крана. Тогда сила D в наклонном положении крана будет приложена в точке ЦВ (рис. 2.12,б). В этом случае возникнет восстанавливающий момент сил D и N = D на плече lθ, равный кренящему моменту MK, т.е.  , где
, где  — поперечная метацентрическая высота, т.е. расстояние от метацентра до центра тяжести.
— поперечная метацентрическая высота, т.е. расстояние от метацентра до центра тяжести.
Метацентром называется точка F пересечения оси плавания с линией действия силы D , а метацентрическим радиусом — расстояние  от метацентра F до центра величины.
от метацентра F до центра величины.
При дифференте на угол ψ восстанавливающий момент равен дифферентующему моменту MД, т.е.  , где
, где  — продольная метацентрическая высота; a — расстояние между центрами тяжести и величины. Произведения
— продольная метацентрическая высота; a — расстояние между центрами тяжести и величины. Произведения  и
и  называются коэффициентами статической остойчивости.
называются коэффициентами статической остойчивости.
Определим метацентрические радиусы и  . Из теории корабля [6] известно следующее:
. Из теории корабля [6] известно следующее:
1) при малых углах крена θ и дифферента ψ положение метацентра F неизменно, а центр величины перемещается по дуге окружности, описанной вокруг метацентра;
2) метацентрический радиус R = J / V, где J — момент инерции площади, ограниченной ватерлинией, относительно соответствующей оси, вокруг которой происходит наклон крана.
Для крана, находящегося в состоянии покоя, ограниченная ватерлинией площадь равна BL.
Для прямоугольного понтона (без учета обводов и скосов) моменты инерции относительно главных осей JХ = L B3 / 12; JY = B L3 / 12,а вытесненный объем воды V = B L T. В этом случае метацентрические радиусы  ;
;  .
.
Таким образом, углы крена и дифферента в зависимости от кренящего и дифферентующего моментов определяют из выражений
 ;
;  .
.
|
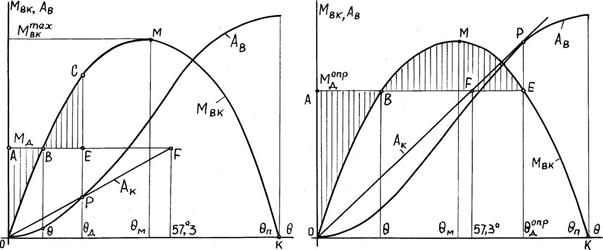
Рис. 2.13. Диаграммы остойчивости плавучего крана: а – статической МВК (q); б – динамической АВ (q)
Для поворотных кранов с качающейся стрелой эти углы переменны как по вылету, так и по углу вращения.
Восстанавливающие моменты при крене и дифференте определяются по формулам вида:
 ;
;  (2.1)
(2.1)
При углах крена, больших 15°, формула (2.1) неприменима, а восстанавливающий момент МВК в зависимости от угла θ изменяется по диаграмме статической остойчивости (рис. 2.13) [6]. При постепенном возрастании кренящего момента до значения, равного максимальному значению восстанавливающего момента МВК max на диаграмме, угол крена достигает θМ, и кран будет неустойчивым, так как любое случайное наклонение в сторону крена приведет к опрокидыванию. Приложение кренящих моментов Mθ ³ МВК maxнедопустимо. Точка К (закат диаграммы) характеризует предельный угол крена θП, при превышении которого МВК < 0 и кран опрокидывается [6]. Диаграмма статической остойчивости входит в обязательную документацию крана; ее построение по чертежу понтона либо по приближенным формулам приведено в работе [6].
При внезапном (или за время, меньшее полупериода собственных колебаний) приложении к ненакрененному понтону динамического момента МД (см. рис. 2.13,а), остающегося в дальнейшем постоянным, в начальный период крена МД > МВК и судно будет крениться с ускорением, накапливая кинетическую энергию. Дойдя до угла статического крена q (точка В), судно будет крениться дальше до угла динамического крена qД, когда запас кинетической энергии израсходуется на преодоление работы восстанавливающего момента и сил сопротивления (точка С, отвечающая равенству площадей ОАВ и СВЕ). При qД £ 10…15О (рис. 2.13, а) можно считать qД = 2q (с учетом сопротивления воды qД= 2 xq, где x — коэффициент затухания (x »0,7) [14]; при наличии начального угла крена ±q0угол динамического крена qД = ±q0+2q. Опрокидывающий динамический момент МД.ОПР и угол опрокидывания qД.ОПР определяют, найдя прямую АЕ, отсекающую на диаграмме статической остойчивости равные площади ОАВ и ВМЕ (рис. 2.13,б).
Диаграмма динамической остойчивости (см. рис. 2.13) — это график зависимости работы восстанавливающего момента АВ=D от угла крена (lq — плечо восстанавливающего момента при крене (см. рис. 2.12); она является интегральной кривой по отношению к диаграмме статической остойчивости; величина dВ = АВ / D =
от угла крена (lq — плечо восстанавливающего момента при крене (см. рис. 2.12); она является интегральной кривой по отношению к диаграмме статической остойчивости; величина dВ = АВ / D =  называется плечом динамической остойчивости [6, 14]. Работа кренящего момента АК = МД qД = D dК,где dК = АК / DД = МД qД / D–удельная работа кренящего момента. График АК (qД) есть прямая OF, проходящая через точки Oи F с координатами (1 рад, МД); Точка Р пересечения (см. рис. 2.13,а) или касания (см. рис. 2.13,б) диаграммы динамической остойчивости с прямой OFопределяет угол динамического крена qД (а) или угол опрокидывания при динамическом крене qД.ОПР (б).
называется плечом динамической остойчивости [6, 14]. Работа кренящего момента АК = МД qД = D dК,где dК = АК / DД = МД qД / D–удельная работа кренящего момента. График АК (qД) есть прямая OF, проходящая через точки Oи F с координатами (1 рад, МД); Точка Р пересечения (см. рис. 2.13,а) или касания (см. рис. 2.13,б) диаграммы динамической остойчивости с прямой OFопределяет угол динамического крена qД (а) или угол опрокидывания при динамическом крене qД.ОПР (б).
Динамический крен (или дифферент) возникает при подъеме груза рывком или при обрыве груза. На рис. 2.14 показаны положения зеркала воды относительно понтона для крана без груза (положение равновесия 1 при угле крена q0) и с грузом при статическом крене (положение 2 при угле крена q). Для нормальной эксплуатации крана желательно иметь равенство абсолютных величин углов крена для груженого и порожнего крана. При обрыве груза кран будет колебаться относительно положения равновесия 1 с амплитудой Δq (см. рис. 2.14), достигая положения 3 при угле динамического крена qДИН = q0 +Δq. Значения последнего получают более точными, если учитывают сопротивление воды, по формуле
qДИН=q0+ (0,5 – 0,7) Δq.
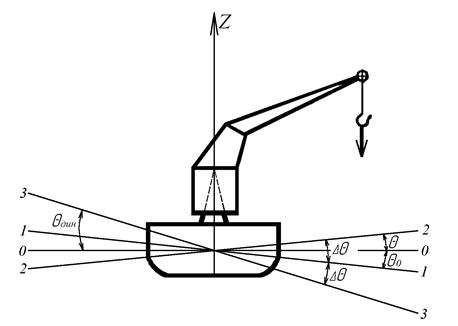
Рис. 2.14. Схема понтона к определению динамического крена
Определение опрокидывающего момента и угла динамического крена в рабочем состоянии при обрыве груза по диаграмме динамической остойчивости, а также проверка остойчивости крана при переходе, перегоне, в нерабочем состоянии; определение опрокидывающего момента в походном состоянии и максимального восстанавливающего момента в нерабочем состоянии подробно рассмотрены в работе [6].
Нагрузки на механизм вращения и изменения вылета.На рис. 2.15,а показаны поперечное (в плоскости Y) и продольное (в плоскости X) сечения понтона после крена на угол q и дифферента на угол ψ.
Вес GК поворотной части крана с грузом имеет составляющие SУи SX, действующие в плоскости вращения и определяемые по зависимостям вида SУ = GК sinq и SХ = GК sin ψ.
Для плавучего крана дополнительный момент, вызываемый креном и дифферентом и действующий на механизм вращения (рис. 2.11), определяется по формуле

Это выражение можно исследовать на максимум Мφ. В частности, если составляющая дифферентующего момента Мψ= GК a – G0 b = 0 (уравновешенный понтон), то максимум Мφдостигается при φ = 45o.
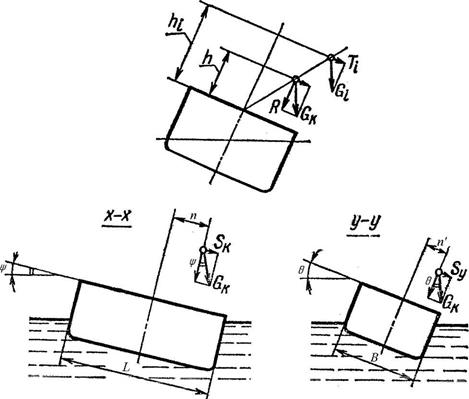
Рис. 2.15. Схемы к расчету дополнительных нагрузок от крена и дифферента на механизмы: а) изменения вылета; б) вращения |
Силы SХ и SУ имеют составляющие, действующие в плоскости качания стрелы и перпендикулярно ей. Составляющие, действующие перпендикулярно плоскости качания стрелы, создают момент, нагружающий механизм вращения, выражение для которого получено выше. Суммарная сила Т составляющих сил SХ и SУ в плоскости качания стрелы определяется по выражению вида Т= SХ sin φ + SY cos φ = GК (sinq sin φ – sin ψ cos φ).
Эта сила действует в плоскости качания стрелы и направлена вдоль понтона. На рис. 2.15, б показано разложение веса GК на силу R, перпендикулярную основной плоскости понтона и учитываемую в расчетах механизма изменения вылета, и на силу T, параллельную продольной оси понтона и создающую дополнительную нагрузку, вызываемую креном и дифферентом. Таким образом, в центре тяжести каждого узла поворотной части крана (стрелы, хобота и т.д.) весом Gi возникает сила Ti, вызванная креном и дифферентом. Дополнительный момент М, нагружающий механизм изменения вылета, определяется по формуле  .
.
Нагрузки от сил инерции, действующие на кран при поперечной и продольной качках судна, подробно представлены в работах [6, 14].
Непотопляемость – способность судна сохранять минимально необходимые плавучесть и остойчивость после затопления одного или нескольких отсеков корпуса. Расчет непотопляемости подробно представлен в работе [6].
Дата добавления: 2015-02-19; просмотров: 26838;