Примеры объектов управления
1.
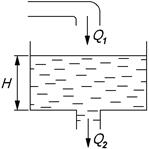
у = Н - управляемая величина (уровень жидкости);
х = Q1 - управляющее воздействие (приток жидкости);
z = Q2 – нагрузка (расход жидкости).
Динамическая характеристика:
где S – площадь поперечного сечения резервуара.
Y = f(X, Z, t) – взаимосвязь всех координат.
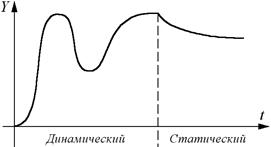
Каждый объект характеризуется двумя характеристиками (режимами): статической и динамической.
Статическая характеристика (установившийся режим) – это характеристика, в которой постоянное входное воздействие Х и возмущение Z постоянны во времени, тогда управляемая величина Y = f(X,Z).
Статические характеристики бывают монотонные и экстремальные.
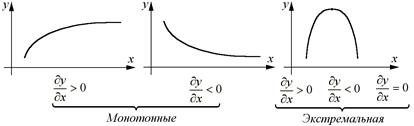
Частным случаем статической характеристики является квазистатическая характеристика, когда на вход подается гармоническое воздействие (sin), тогда в установившемся режиме тоже будет гармоническая величина.
Динамическая характеристика, когда управляемая величина Y не является постоянной во времени и описывается следующим уравнением: Y(t) = f(X(t), Z(t), t). Все переменные описываются системой обыкновенных дифференциальных уравнений (ОДУ), либо системой нелинейных дифференциальных уравнений (НДУ).
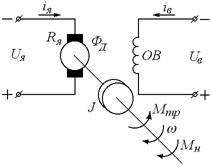
2. Электродвигатель постоянного тока.
Фд - магнитный поток двигателя;
iя - ток якоря двигателя;
Uя - напряжение якоря двигателя;
Rя - сопротивление якоря двигателя;
iв - ток обмотки возбуждения;
Uв - напряжение обмотки возбуждения;
Мтр - момент трения, возникающий на валу двигателя;
w - частота вращения вала двигателя;
J - момент инерции механизма, приведенного к валу двигателя;
Мнагр - момент нагрузки на валу двигателя.
Запишем уравнения:
 - динамические характеристики.
- динамические характеристики.
При статической характеристике все производные зануляются.
a1 и c1 -конструктивные параметры двигателя;
Фд - является нелинейной функцией от тока возбуждения;
Мтр - является нелинейной функцией от частоты вращения вала двигателя;
Управляющим воздействием является Х = Uя(Uв), управляемой величиной – У = w, нагрузка (внешнее воздействие) – Z = Uв(Uя), Мнагр, Мтр – помеха.
Дата добавления: 2015-02-16; просмотров: 1405;