Типовая функциональная схема САР (замкнутая)
U(t) – задающее воздействие (общий сигнал в систему),
x(t) – управляющее воздействие (то, что вырабатывает регулятор),
y(t) – управляемая величина,
e(t) – отклонение (ошибка) управляемой величины от задающего воздействия.
Структура САУ:
1 - Задающее устройство, которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
Å 2 - сравнивающее устройство, вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
3 - преобразующее устройство, преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическая®механическая);
4 и 8 - корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. 4 - последовательная коррекция, 8 - параллельная коррекция.
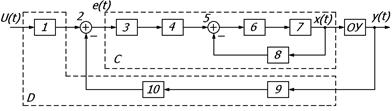
Å 5 - сравнивающее устройство местной обратной связи;
6 -усилительное устройство, усиливает мощность сигнала;
7 - исполнительное устройство, вырабатывает управляющее воздействие x(t) непосредственно на объект управления;
9 - чувствительный элемент, фиксирует (измеряет) управляемую величину y(t);
10 - элемент главной обратной связи, преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
ОУ - объект управления.
Блоки 1, 10, 9 образуют датчик, а блоки 3, 4, 5, 6, 7, 8 – сервомеханизм.
Тогда, с учетом укрупнений, получим:
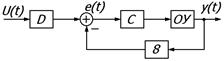
Датчик измеряет управляемую величину и задающую. Сервомеханизм вырабатывает и реализует управляющее воздействие.
Реальная САУ может не содержать некоторые из рассматриваемых пронумерованных блоков. Некоторые блоки могут объединяться. То, что называли блоками, носит название звеньев. И регулятор, и ОУ могут состоять из нескольких звеньев.
 Два сигнала – входной и выходной.
Два сигнала – входной и выходной.
Дата добавления: 2015-02-16; просмотров: 1127;