Проверочный расчет элеватора
1. Выполняется уточненный тяговый расчет элеватора методом обхода по контуру.
Примерный порядок тягового расчета:
1) натяжение (Н) в точке 1 (рис. 10.3)
F1 = Fmin, (10.22)
где Fmin — натяжное усилие, Н;
2) натяжение (Н) в точке 2
F2 = kпF1 + Fзач, (10.23)
где kп — коэффициент увеличения натяжения тягового органа от сопротивления на поворотном пункте - см. (5.26) [1];
Fзач — сопротивление зачерпыванию груза [см. (10.13)], Н;
3) натяжение (Н) в точке 3
F3 = Fнa6 = F2 + (q + qк)gH, (10.24)
где Fнaб — усилие набегающей ветви в точке 3, Н;
q — погонная масса транспортируемого груза, кгДм;
qк— погонная масса ходовой части [см. (10.4) и (10.5)], кг/м;
Н — высота подъема груза, м;
4) натяжение (Н) в точке 4
F4 = Fс6 = F1 + qкgH, (10.25)
где Fс6 — усилие в сбегающей ветви в точке 4, Н;
5) для ленточного элеватора во избежание скольжения ленты по барабану необходимо, чтобы
F3 ≤ Fefα, (10.26)
где еfα — см. формулу (10.17).
Из формул (10.22) ...(10.25) определяется необходимое натяжное усилие Fmin, которое должно удовлетворять условиям формул – см. (5.33) и (5.34) [1].
2. По наибольшему усилию в тяговом органе Fmax = Р3 делается уточненный расчет на прочность ленты [по формуле (10.18)] или тяговой цепи - по формулам(8.12)...(8.14) [1]. При этом динамическая нагрузка (Н) на тяговый орган цепного элеватора
 (10.27)
(10.27)
3. Определяется тяговая сила на барабане (звездочке) с учетом сопротивлений на барабане (звездочке)
F0 = kпF3 – F4. (10.28)
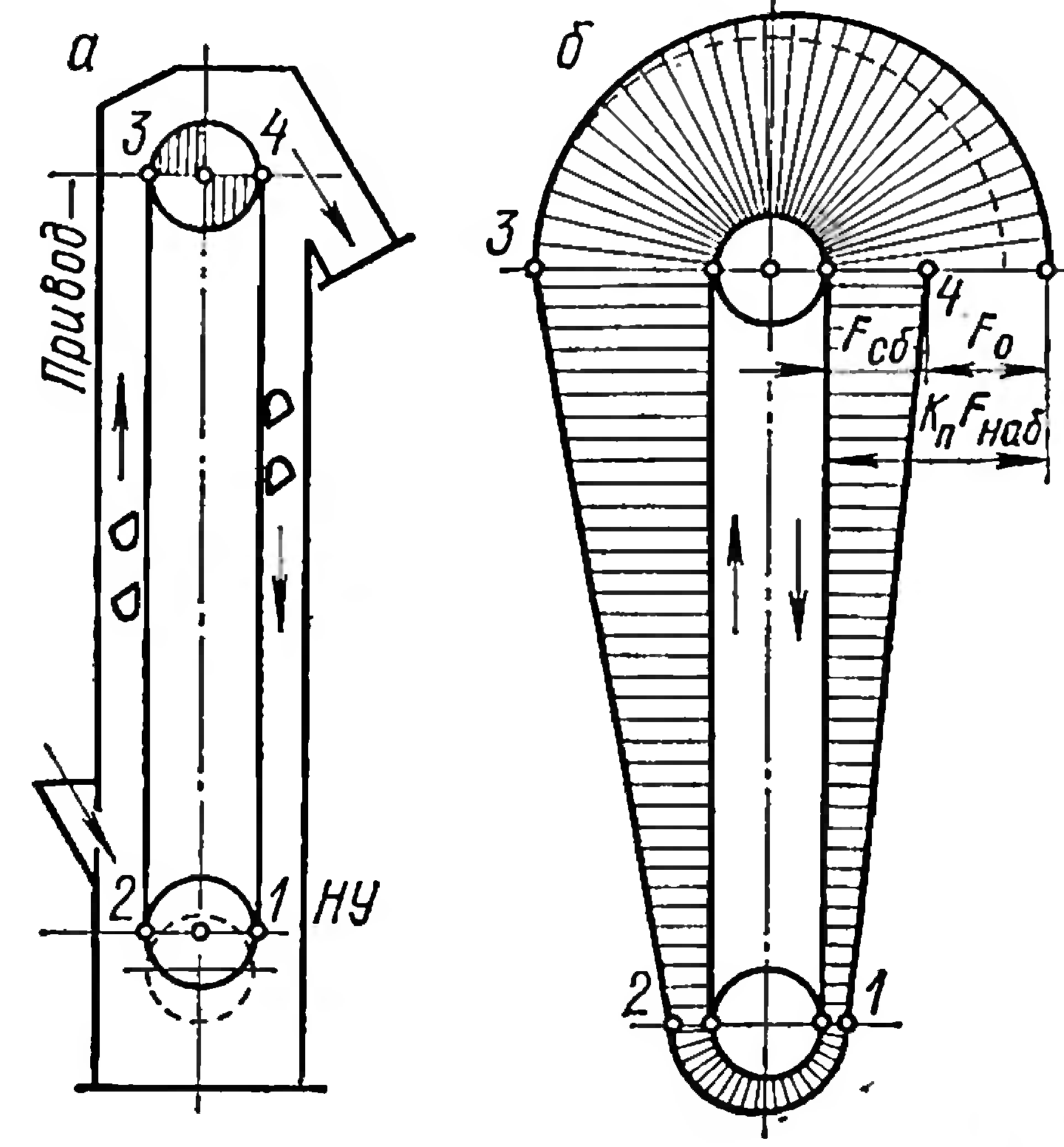
Рисунок 10.3. Расчетная схема (а) и диаграмма натяжений (б) тягового органа вертикального элеватора
4. Проверяется правильность выбора диаметра приводного барабана (для ленточного элеватора) по среднему давлению [см. (8.6)].
5. Определяется мощность на приводном валу элеватора [см. (8.9)].
6. Определяется мощность двигателя для привода элеватора [см. (9.10)]. При этом коэффициент запаса k=1,25.
7. Определяется частота вращения приводного вала элеватора: ленточного — по формуле (8.22); цепного — по формуле (9.11).
8. Определяется необходимое передаточное число между валом двигателя и приводным валом элеватора [см. (8.23)].
9. Из конструктивных соображений составляется кинематическая схема привода элеватора. При редукторной схеме по каталогу выбирается редуктор (см. табл. III.4 [1]).
10. Уточняется скорость движения ковшей исходя из фактического передаточного числа привода: для ленточного элеватора — по формуле (8.24); для цепного элеватора по формуле
 , (10.28а)
, (10.28а)
где  – фактическое общее передаточное число привода конвейера.
– фактическое общее передаточное число привода конвейера.
11. Уточняется производительность элеватора (т/ч):
Qф = 3,6i0vфψρ/ tк, (10.29)
где i0 — вместимость ковша, л;
v— фактическая скорость ковшей, м/с;
ψ— коэффициент заполнения ковшей (см. табл. 12.5);
ρ — насыпная плотность груза (см. табл. 4.1), т/м3;
tк — шаг ковшей, м.
Допускается отклонение от заданной производительности ±10 %.
12. Проверяется двигатель на достаточность пускового момента по продолжительности пуска (разгона) согласно условию
Время пуска (разгона) конвейера (с)
 (10.30)
(10.30)
где δ – коэффициент, учитывающий влияние вращающихся масс привода механизма (кроме ротора двигателя и муфты). δ = 1,1…1,25;
I – суммарный момент инерции ротора двигателя и соединительной муфты, кг∙м2;
n – частота вращения вала двигателя, мин-1;
Tср.п – средний пусковой момент двигателя, Нм;
Tc – момент статических сопротивлений на валу двигателя, Нм;

kу – коэффициент, учитывающий упругость тягового органа, благодаря которой не все элементы конвейера приходят в движение одновременно: для резинотканевых лент ky — 0,5...0,7, для резинотросовых лент - 0,85...0,95; для цепей ky = 0,85 ... 0,95 (меньшие значения — для конвейеров длиной более 100 м; большие — для коротких конвейеров);
mб – масса вращающихся барабанов конвейера, кг;
kc – коэффициент, учитывающий уменьшение скорости вращающихся частей конвейера относительно скорости тягового органа: для ленточных конвейеров kc — 0,7...0,9; для цепных конвейеров kc — 0,5... 0,7;
v – скорость транспортирования, м/с.
13. Определяется усилие в набегающей на приводной барабан (приводные звездочки) ветви тягового органа конвейера при пуске конвейера и определяется коэффициент снижения прочности тягового органа при пуске:
Момент сил инерции на валу двигателя (Нм) при пуске конвейера
Tин = Tср.п - Tc. (10.31)
Тс = Тсв  (10.32)
(10.32)
где и — передаточное число привода;
Тсв — момент статических сопротивлений на приводном валу конвейера, Нм.
Тсв = 0,5FoD, (10.33)
где D — диаметр приводного барабана или приводной звездочки конвейера, м.
Момент сил инерции на приводном валу (Нм) при пуске конвейера
Тин.в= Тиниη. (10.34)
Момент от сил инерции и статических сопротивлений на приводном валу (Нм) при пуске (разгоне) конвейера
Тпуск = Тин.в + Тсв. (10.35)
Окружное усилие (Н) на приводном барабане (звездочке) при пуске конвейера
Fnycк = (2Тпуск)/D. (10.36)
Усилие (Н) в набегающей на приводной барабан ветви ленты конвейера при пуске
 (10.37)
(10.37)
где
 .
.
Усилие (Н) в набегающей на приводные звездочки ветви цепного тягового органа при пуске
 (10.38)
(10.38)
где Fдни — динамическая нагрузка на цепи;
Fcб — натяжение ветви тягового органа, сбегающей с приводной звездочки;
Fcб = Frnin.
Коэффициент перегрузки тягового органа при пуске конвейера
 (10.39)
(10.39)
где Fдоп — допускаемая нагрузка на тяговый орган.
14. Определяется расчетный тормозной момент и выбирается тормозное устройство:
Момент сил инерции на валу двигателя (Нм) при торможении
 (10.40)
(10.40)
где tт — время торможения конвейера, определяемое в предположении линейного изменения во времени скорости v до полной остановки, с.
Максимальный путь торможения конвейера lт, работающего в технологической цепи (во избежание засыпки грузом узла перегрузки), можно принять равным 2...3 м. При этом время торможения (с) конвейера
tт = (2lт)/v. (5.41)
Момент сил инерции на приводном валу (Нм) при торможении конвейера
 (10.42)
(10.42)
Расчетный тормозной момент (Нм) на валу двигателя конвейера, работающего в технологической цепи:

где  — момент статических сопротивлений конвейера на валу двигателя при торможении, Нм:
— момент статических сопротивлений конвейера на валу двигателя при торможении, Нм:
 (10.43)
(10.43)
Расчетный тормозной момент на приводном валу (Нм) конвейера в этом случае
 (10.44)
(10.44)
Необходимый тормозной момент на валу двигателя для предотвращения самопроизвольного обратного движения ходовой части конвейера при случайном выключении двигателя и полностью загруженной рабочей ветви тягового органа конвейера определяется по формуле (5.39), правая часть которой должна быть умножена на коэффициент запаса торможения kT= 1,25. Если Тс.в ≤ 0, тормоз не требуется.
Тормозное устройство (тормоз или останов) выбирается по большему из определенных выше тормозных моментов.
Тема 11. Расчет винтового конвейера (3 ч)
Дата добавления: 2015-02-13; просмотров: 2999;