Исходные данные для выполнения работы
| № варианта | Вес груза Q, кН | Скорость передвижения тележки Vт, м/мин | Режим работы крана |
| л | |||
| т | |||
| л | |||
| т | |||
| с | |||
| с | |||
| т | |||
| с | |||
| т | |||
| с | |||
| л | |||
| т | |||
| с | |||
| л | |||
| т | |||
| с | |||
| т | |||
| с | |||
| т | |||
| с | |||
| с | |||
| л | |||
| т | |||
| л | |||
| л | |||
| л | |||
| л | |||
| с | |||
| т | |||
| т |
Тема 5. Расчет механизмов поворота ГПМ (3 ч)
Общий расчет механизма поворота. Он заключается в определении нагрузок на опоры поворотной части крана, в определении сопротивлений вращению, выборе двигателя, редуктора, муфт, тормоза и расчете конечного звена передачи — зубчатой, цевочной или канатной.
Момент сопротивления вращению поворотной части крана на валу двигателя в период пуска (разгона)
 (5.1)
(5.1)
где Тин — момент сопротивления от сил инерции при пуске;
Тукл— момент статического сопротивления от веса крана и груза относительно оси вращения крана при нахождении крана на уклоне;
Тв — момент статического сопротивления от ветровой нагрузки относительно оси вращения крана;
Ттр — момент статического сопротивления от сил трения относительно оси вращения крана;
u и η — передаточное отношение и к.п.д. механизма между осью поворота и валом двигателя.
Наибольший момент сопротивления (Нм) вращению от веса поворотной части крана и груза при нахождении крана на уклоне
 (5.2)
(5.2)
где тпов — масса поворотной части крана, кг: тпов = тцл + тпв + тб + тс (соответственно масса поворотной платформы, противовеса с противовесной стрелой, башни, стрелы);
lпов — расстояние от оси вращения крана до центра тяжести поворотной части крана, м;

lпл, lпd, lб и lс — соответственно расстояния от оси вращения крана до центра тяжести соответственно платформы, противовеса, башни и стрелы, м;
Q — масса груза при номинальной грузоподъемности, кг;
R — вылет крана, м;
α — угол наклона пути крана.
Наибольший момент сопротивления (Нм) вращению поворотной части крана от ветровой нагрузки относительно оси вращения крана
 (5.3)
(5.3)
где  —ветровые нагрузки на кран и груз, Н;
—ветровые нагрузки на кран и груз, Н;
rв — расстояние от оси вращения до центра тяжести площади наветренной поверхности крана, м.
Момент сопротивления (Нм) вращению поворотной части крана от сил трения относительно оси вращения крана
где Fi - опорные нагрузки (см. ниже), Н;
fi - коэффициенты трения;
r i - радиусы действия сил трения опор поворотной части крана, м.
Статическая мощность (кВт) двигателя привода механизма поворота крана
 (5.4)
(5.4)
где Тс - момент статических сопротивлений вращению поворотной части крана относительно оси вращения крана, Нм;
nпов - частота вращения поворотной части крана, мин-1;
η - КПД привода механизма поворота.
Двигатель предварительно выбирают по статической мощности Рс, принимая при этом из каталога ближайший больший по мощности. После определения необходимого пускового момента механизма поворота определяют по этому моменту необходимую мощность двигателя при пуске Рпуск. Необходимая номинальная мощность двигателя может быть определена из условия Рдв ≥ k Рпуск, где k — коэффициент, учитывающий допустимую перегрузку двигателя в период пуска (k = = 0,35...0,5). Затем двигатель проверяется согласно указаниям параграфа 1.7 [1 ].
Момент сопротивления (Нм) при торможении (тормозной момент) механизма поворота крана на валу тормоза при неблагоприятном сочетании нагрузок
 (5.5)
(5.5)
где  –момент сил инерции навалу двигателя при торможении;
–момент сил инерции навалу двигателя при торможении;
 — момент статических сопротивлений повороту вращающейся части крана на валу тормоза при торможении;
— момент статических сопротивлений повороту вращающейся части крана на валу тормоза при торможении;

Предохранительная фрикционная муфта привода механизма поворота крана рассчитывается на момент

Где  - момент, передаваемый двигателем предохранительной фрикционной муфте в период пуска механизма поворота.
- момент, передаваемый двигателем предохранительной фрикционной муфте в период пуска механизма поворота.
Опорно-поворотное устройство кранов с расположением опор в вертикальной плоскости (рис. 5.1). Нагрузки:
на опоры А и С:
 (5.6)
(5.6)

Рисунок 5.1. Расчетные схемы кранов:
а —с поворотной колонной; б —с неподвижной колонной
на опору B:
 (5.7)
(5.7)
где Q - масса груза, кг;
тс - масса стрелы (поворотной части крана без противовеса и противовесиой стрелы), кг;
тпв — масса противовеса и противовесиой стрелы, кг;
lс и lпв — расстояния от оси вращения крана до центра тяжести соответственно стрелы и противовеса, м.
Массу противовеса для крана с постоянным вылетом стрелы можно принять
где φ =kг/(kг+1);
kг — коэффициент использования крана по грузоподъемности (см. табл. 1.7 [1]).
Момент сопротивления (Нм) вращению от сил трения в этих опорах относительно оси вращения крана
 (5.8)
(5.8)
где dА, dB, dC, — диаметры цапф опор;
fА, fB, fdC — коэффициенты трения в соответствующих опорах.
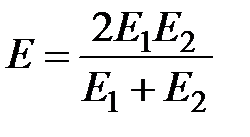
Если в опоре применяются опорные колеса (опора А, рис. 5.1 и 5.2), момент сопротивления вращению (Нм) относительно оси колонны в такой опоре при двух опорных колесах

где FА - опорная нагрузка, Н [см. (5.6)];
β - угол между опорными колесами;
DA - диаметр круга катания в опоре, м;
Dк — диаметр колеса, м;
μ - коэффициент трения качения ролика по кругу катания (по колонне): μ = 0,0003...0,0007 м;
dк, - диаметр оси колеса;
f – приведенный коэффициент трения в подшипниках колеса.
В этой формуле знак плюс перед цифрой 1 при неподвижной колонне (внешняя опора), знак минус — при вращающейся колонне (внутренняя опора).
Опорные колеса рассчитываются на контактную прочность.
При линейном контакте колеса с плоской опорной поверхностью катания (рельс с плоской головкой) контактные напряжения (Па)

При точечном контакте колеса с выпуклой опорной поверхностью катания (рельс с выпуклой.головкой)
где kf — коэффициент, учитывающий влияние трения на работу опорных колес. При режимах работы: легком kf = 1,0, среднем — kf = 1,04... 1,06, тяжелом k = 1,06... 1,1; — расчетная нагрузка на колесо, Н:
kн—коэффициент неравномерности распределения нагрузки по ширине рельса: для рельсов с плоской головкой kн = 2, с выпуклой головкой — kн = 1,1;
kд — коэффициент динамичности, зависящий от скорости передвижения колеса v. При v (м/с) менее 1; 1... 1,5; 1,5...3; более 3 kд соответственно равен 1,0; 1,1; 1,2; 1,3;
F — максимальная нагрузка на колесо при номинальных нагрузках на кран в рабочем состоянии, Н;
Е — приведенный модуль упругости материала колеса и рельса. Па:
 ,
,
Е1и Е2 — модуль упругости материала соответственно колеса и рельса, Па;
b — рабочая ширина головки рельса без учета закруглений, м;
R — радиус колеса, м;
k — коэффициент, зависящий от отношения R2/R < 1;
R1 — больший из радиусов колеса и скругления (выпуклости) головки рельса, м;
R2 — меньший из радиусов колеса и скругления головки рельса, м:

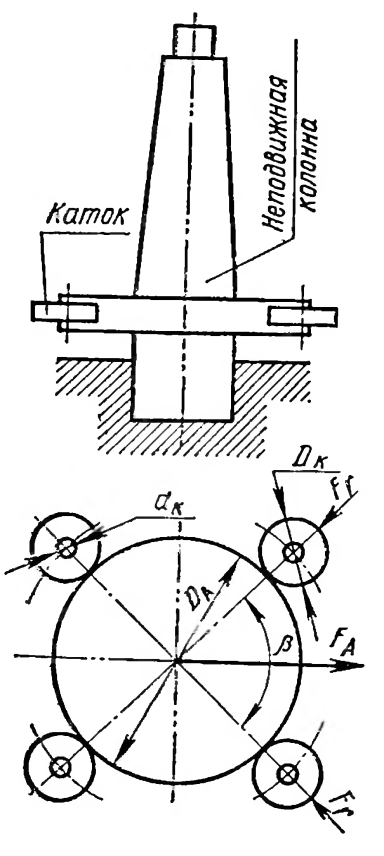
| Рисунок 5.2.Расчетная схема опорных нагрузок на катки крана с неподвижной колонной | Рисунок 5.3. Расчетные схемы опорно-поворотного устройства: а — нагружения; б — опорного участка; в —для установления расчетного пролета, определяющего опорные реакции |
Допускаемые контактные напряжения [σН]составляют 0,7...0,9 предела текучести материала колеса 25-107...32-107 Па.
Опорно-поворотные устройства кранов с расположением опор в горизонтальной плоскости (рис.5.3). Все действующие на опорно-поворотные устройства силы можно свести к вертикальной силе Fв, приложенной по оси опорно-поворотного устройства, горизонтальной силе Fг, приложенной к опорным элементам по центру тяжести тел качения и к моменту М,определяемому из условия
где Lи h — см. рис. 5.3.
Средняя нагрузка (H) на один опорный элемент в секторе с углом β опорно-поворотного устройства:
а) каткового (опорная реакция вертикальна)
 (5.9)
(5.9)
б) шарикового или роликового (опорная реакция наклонена под углом у к вертикали)
 (5.10)
(5.10)
где z' — число опорных элементов в секторе с углом β;
Dcp — диаметр опорного круга по средней линии качения (диаметр беговой дорожки тел качения), м;
β — центральный угол между точками пересечения окружности диаметром Dcp с осями продольных (хребтовых) балок рамы неповоротной части крана (см. рис. 5.3);
γ — угол наклона опорной реакции к вертикали.
Для опорно-поворотного устройства шарикового, роликового и многокаткового

где z— общее количество опорных элементов в опорно-поворотном устройстве (шариков, роликов, катков).
Для опорно-поворотного устройства с опорными колесами z' равно 2 или 4 (по два колеса на балансире).
Для опорно-поворотных устройств с кольцами из хромистой или марганцовистой стали, при твердости рабочей поверхности 47...55 HRC, со стандартными шариками или роликами (диаметр ролика равен его длине) предельная допустимая нагрузка (МН):
на шарик
 ;
;
на ролик
 ,
,
где dm, dp — диаметр соответственно шарика и ролика, м.
Момент сил трения (Нм) в шариковых и роликовых опорно-поворотных устройствах относительно оси вращения может быть принят равным
Момент сил трения (Нм) в опорно-поворотных устройствах многокатковых и с опорными колесами может быть принят равным
 (5.11)
(5.11)
Примерная последовательность расчета механизма поворота:
1) определяются опорные нагрузки по (5.6), (5.7), (5.9), (5.10);
2) определяются моменты сопротивления вращению от уклона пути, ветровой нагрузки и сил трения по (5.2), (5.3), (5.8), (5.11);
3) определяется статическая мощность двигателя по (5.4) и выбирается двигатель;
4) определяется общее передаточное число привода u= n/nпови составляется кинематическая схема механизма;
5) определяется расчетная мощность редуктора по (1.101) или (1.102) [1];
6) определяются расчетные моменты соединительных муфт по (1.33) и (1.103) [1] и выбираются муфты (табл. Ш.5.1...111.5.9 [1]);
7) определяется время пуска (торможения) по (1.76) [1] и проверяется соответствие его данным табл. 1.21 [1];
8) определяется момент сопротивления вращению поворотной части крана на валу двигателя при пуске по (5.1);
9) определяется необходимая мощность двигателя при пуске согласно (5.4) при Тс = Тиуски производится его проверка согласно пояснениям к формуле (5.4);
10) проверяется двигатель на нагрев (см. параграф 1.7 [1]);
11) определяется момент сопротивления на валу тормоза при торможении по (5.5) и выбирается тормоз по табл. Ш.5.П.. Ш.5.14 [1];
12) производится расчет на прочность отдельных элементов механизма (опорных колес, предохранительной фрикционной муфты и до.).
Тема 6. Расчет механизмов подъема стрелы ГПМ (3 ч)
Изменение вылета стреловых кранов осуществляется наклоном стрелы или передвижением грузовой тележки по ее направляющим балкам. В первом случае общий расчет механизма изменения вылета состоит в определении усилия в канате полиспаста, выборе и расчете каната и барабана, выборе двигателя, редуктора, муфт и тормоза.
При изменении вылета передвижением грузовой тележки расчет аналогичен расчету механизма передвижения с учетом разности натяжений конечных ветвей грузового каната, сопротивления вследствие провисания хвостовой части тягового каната и центробежной силы инерции массы груза и тележки при повороте крана (для поворотных кранов).
При изменении вылета наклоном стрелы усилие в канате стрелового полиспаста у барабана
 (6.1)
(6.1)
Где  — см. формулу (6.3);
— см. формулу (6.3);
 — кратность стрелового полиспаста;
— кратность стрелового полиспаста;
η0 — КПД стрелового полиспаста и обводных блоков - см. (2.2) [1].
Момент статического сопротивления на валу двигателя при подъеме стрелы
 (6.2)
(6.2)
Где  — расчетный диаметр барабана лебедки изменения вылета - см. (2.33) [1];
— расчетный диаметр барабана лебедки изменения вылета - см. (2.33) [1];
u – общее передаточное число привода механизма;
ηб – КПД барабана механизма;
ηпр — КПД привода механизма.
Статическая мощность двигателя определяется по формуле (1.33) [1].
Усилие в стреловом полиспасте (Н) (рис. 6.1)
 (6.3)
(6.3)
где Q — масса груза при номинальной грузоподъемности, кг;
mс— масса стрелы, кг;
 — масса стрелового полиспаста, кг;
— масса стрелового полиспаста, кг;
 — длина горизонтальной проекции стрелы, м;
— длина горизонтальной проекции стрелы, м;
 — кратность грузоподъемного полиспаста;
— кратность грузоподъемного полиспаста;
 — КПД грузоподъемного полиспаста;
— КПД грузоподъемного полиспаста;
 — ветровая нагрузка на груз, Н;
— ветровая нагрузка на груз, Н;
 — ветровая нагрузка на стрелу,
— ветровая нагрузка на стрелу,
 — центробежная сила от груза и грузового полиспаста, Н;
— центробежная сила от груза и грузового полиспаста, Н;
 — центробежная сила стрелы, Н;
— центробежная сила стрелы, Н;
 — центробежная сила от стрелового полиспаста (учитывается половина его массы), Н;
— центробежная сила от стрелового полиспаста (учитывается половина его массы), Н;
δ — угол наклона полиспаста стрелы от горизонтали (рис. 6.1);
H,  , d — длина плеч сил (рис. 6.1).
, d — длина плеч сил (рис. 6.1).
Знак плюс перед вторым слагаемым знаменателя принимается, когда стреловой полиспаст наклонен от головки стрелы вверх, знак минус — при обратном наклоне.
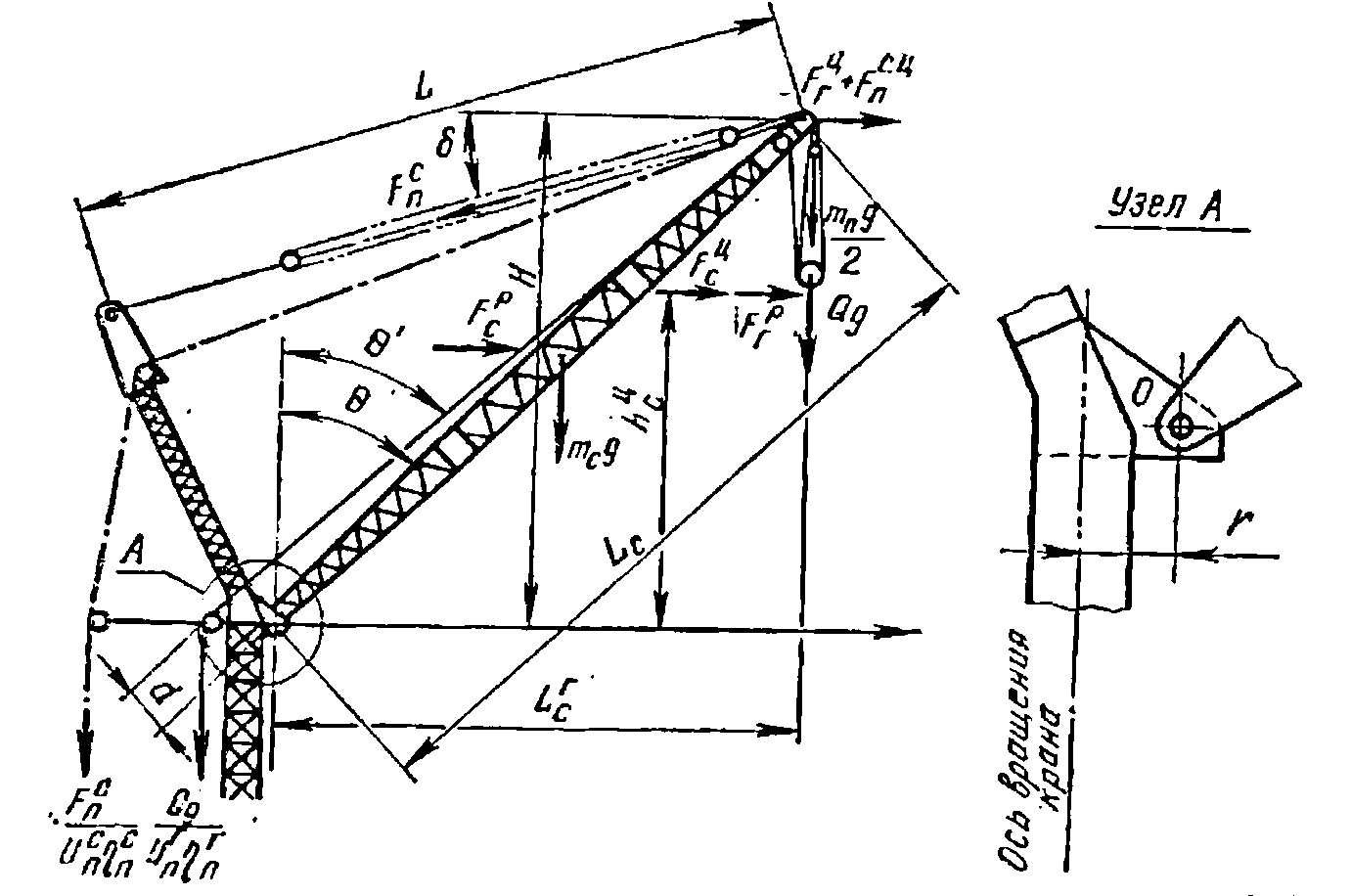
Рисунок 6.1. Схема для определения усилиия ив стреловом полиспасте
Для стрел с вылетом до 25 м у кранов с частотой вращения до 1 мин-1 центробежные силы могут не учитываться.
Максимальное усилие в стреловом полиспасте будет при наибольшем вылете стрелы. Расчетное усилие в стреловом полиспасте для определения необходимой мощности двигателя можно принимать равным полусумме усилий в полиспасте при крайних положениях стрелы.
Центробежная сила (Н) от массы груза
 (6.4)
(6.4)
где nпов- частота вращения поворотной части крана, мин-1;
R - вылет стрелы, м.
Центробежная сила (Н) от массы стрелы
 (6.5)
(6.5)
где r – расстояние от оси вращения крана до оси пяты стрелы (см. рис. 6.1);
Lc – длина стрелы;
Θ - угол наклона стрелы.
Ордината центробежной силы (рис. 6.1)
 (6.6)
(6.6)
Ход стрелового полиспаста (м)
 (6.7)
(6.7)
где Lmax, Lmin —длина стрелового полиспаста при наибольшем и наименьшем вылетах стрелы.
Длина каната, наматываемого на барабан стреловой лебедки:
 (6.8)
(6.8)
Средняя скорость навивки каната на барабан
 (6.9)
(6.9)
где t — заданное время наклона стрелы при переходе из одного крайнего положения в другое, с.
Момент статических сопротивлений на валу тормоза при торможении определяется по (2.37) [1], в которой  [см. (6.1)]
[см. (6.1)]
Далее расчет производится так же, как и для механизма подъема (см. тему 2).
Коэффициент запаса торможения kт для механизма изменения вылета подъемом и опусканием стрелы принимают не менее 1,5.
При изменении вылета посредством перемещения грузовой тележки по направляющим балкам стрелы с помощью тягового каната (рис. 2.14) усилие в этом канате
 (6.10)
(6.10)
где Fпер —сопротивление передвижению тележки от трения уклона пути и ветровой нагрузки, H;
Fц — центробежная сила инерции, создаваемая массой груза и тележки при повороте крана, H:
 (6.711)
(6.711)
Q — номинальная грузоподъемность, кг;
mт — масса тележки, кг;
Fн — разность натяжений ветвей грузового полиспаста, Н:
 (6.12)
(6.12)
Fн и Fi — натяжение первой и конечной ветвей каната грузового полиспаста (рис. 6.2);
ηбл —КПД канатного блока;
z — количество ветвей каната в системе грузового полиспаста:
z = uгп+2;
uгп — кратность грузового полиспаста;
Fпр — сопротивление от провисания хвостовой ветви тягового каната, Н:
 (6.13)
(6.13)
qк — погонная масса хвостового каната, кг/м;
l — длина (наибольшая) хвостовой ветви тягового каната, м;
h — провисание, допускаемое для хвостовой ветви тягового каната, м: h = (0,01...0,02)l.

Рисунок 6.2. Расчетная схема канатного механизма передвижения грузовой те лежки
Далее расчет привода лебедки механизма передвижения тележки производится так же, как и привода механизма передвижения мостового крана.
Примерная последовательность расчета механизма изменения вылета наклоном стрелы:
1) определяется усилие в стреловом полиспасте для крайних положений стрелы [см. (6.3)];
2) определяется максимальное и минимальное усилие в канате стрелового каната у барабана [см. (6.1)];
3) определяется среднее усилие в канате  , равное полусумме максимального и минимального усилий;
, равное полусумме максимального и минимального усилий;
4) определяется средняя скорость навивки каната на барабан по (6.9);
5) определяется необходимая мощность двигателя и выбирается двигатель;
6) производится расчет каната на прочность по (2.6) [1] и выбирается канат по табл. III.1.1...III.1.7[1];
7) определяются диаметры барабана по (2.9) и (2.33) [1];
8) определяется частота вращения барабана согласно (2.35) [1] при vгuп=vк) где vк — см. (6.9);
9) определяется общее передаточное число привода по (2.36) [1] и составляется кинематическая схема механизма;
10) определяется расчетная мощность редуктора по (1.101) или (1.102) [1] и выбирается редуктор;
11) определяются расчетные моменты соединительных муфт при максимальных нагрузках стрелового полиспаста согласно (1.30) при  ;
;
12) проверяется двигатель на время пуска по (1.71) [1] при максимальном и минимальном усилии в канате. Полученное время должно соответствовать данным табл. 1.20[1];
13) определяется момент статического сопротивления на валу тормоза при торможении  по (2.37) [1], принимая ;
по (2.37) [1], принимая ;
14) определяется тормозной момент, необходимый по правилам Госгортехнадзора, по (2.38) [1] при  и выбирается тормоз;
и выбирается тормоз;
15) определяется время торможения по (1.72) [1] при максимальном усилии в канате и проверяется его соответствие данным табл. 1.20 [1];
16) проверяется правильность выбора двигателя по пусковому моменту при наибольшей нагрузке  (т. е. при крайнем нижнем положении стрелы) из условия Tmax≤ Tср.п, где Тmax — максимальный момент на валу двигателя согласно (6.2) при , Tср.п — среднепусковой момент двигателя - см. (1.89) [1]. Проверка двигателя на нагрев может не производиться, так как его мощность определена по средней нагрузке, которая при приближенных расчетах принимается как среднеквадратичная.
(т. е. при крайнем нижнем положении стрелы) из условия Tmax≤ Tср.п, где Тmax — максимальный момент на валу двигателя согласно (6.2) при , Tср.п — среднепусковой момент двигателя - см. (1.89) [1]. Проверка двигателя на нагрев может не производиться, так как его мощность определена по средней нагрузке, которая при приближенных расчетах принимается как среднеквадратичная.
17) производится расчет на прочность отдельных элементов ме-
ханизма (барабана, крепления концов каната и др.).
При изменении вылета посредством передвижения грузовой тележки последовательность расчета механизма передвижения тележки аналогична такому же расчету механизма передвижения крана. При этом усилие в канате лебедки определяется по (6.10).
Тема 7. Расчет устойчивости ГПМ (3 ч)
Для обеспечения надежной и безопасной работы, кран должен обладать устойчивостью против опрокидывания. Когда краны находятся на строительной площадке, на него действуют:
– моменты сил, стремящихся опрокинуть кран (от массы груза, ветровые нагрузки, силы инерции движущихся частей крана, нагрузки от уклона);
– момент силы, удерживающий кран от опрокидывания (от собственной массы крана).
Эти силы, с учетом плеча их действия относительно ребра опрокидывания, создают 2 момента – опрокидывающий и удерживающий.
Для обеспечения устойчивости крана должно обеспечиваться условие:
Расчет устойчивости крана производят в следующих случаях:
- при работе крана с грузом – грузовая устойчивость крана;
- не рабочего состояния крана – собственная устойчивость крана;
- при внезапном снятии груза с крана.
Грузовая устойчивость крана
При расчете грузовой устойчивости предполагают, что кран поднимает груз весом Q, равным грузоподъемности крана на данном вылете стрелы.
Ветровые нагрузки действуют со стороны противовеса крана. Кран стоит на уклоне, уклон в сторону груза.
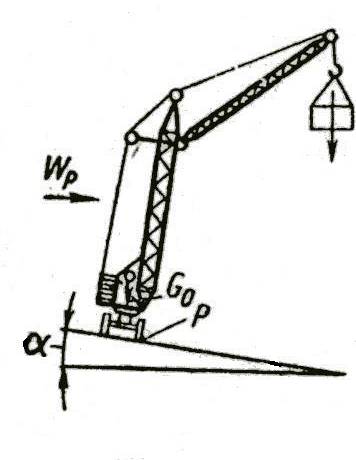
Рисунок 7.1. Грузовая устойчивость в рабочем состоянии

Кг – коэффициент, учитывающий режимы работы крана,
Моу – удерживающий момент относительно ребра опрокидывания от веса крана.
М - опрокидывающий момент относительно ребра опрокидывания от тяжести груза.
МWв – опрокидывающий момент от ветровой нагрузки в рабочем состоянии,
Мд – опрокидывающий момент от динамических нагрузок.
Собственная устойчивость крана
При проверке собственной устойчивости считают, что на кран действуют ветровые нагрузки в сторону противовеса, кран стоит на уклоне в сторону опрокидывания, без груза.
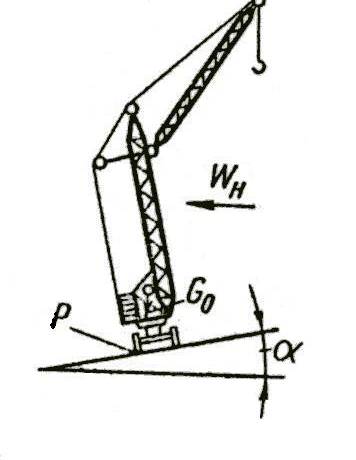

Рисунок 7.2. Собственная устойчивость в нерабочем состоянии
Устойчивость при внезапном снятии груза
Для проверки устойчивости при внезапном снятии груза считают, что кран располагается на уклоне в сторону опрокидывания, нагрузка на крюке направлена вверх, ветровая нагрузка направлена в сторону стрелы.
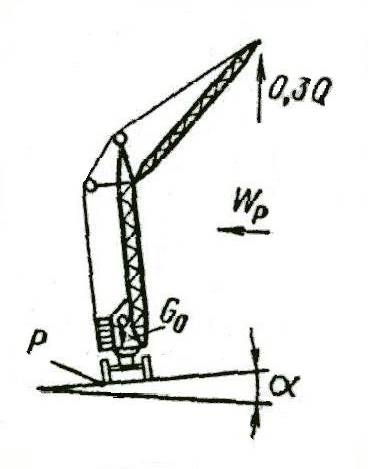
Рисунок 7.3. Устойчивость при внезапном снятии груза

Грузовую грузоподъемность крана проверяют как для максимального, так и для минимального вылета стрелы.
Собственная устойчивость крана проверяется при положении стрелы на максимальном вылете.
При расчете устойчивости крана угол наклона принимают:
– для башенных строительных кранов – α = 1,5о;
– для пневмоколесных, гусеничных, автомобильных, работающих без выносных опор– α = 3о; при работе на выносных опорах– α = 1,5о.
Устойчивость крана характеризуется коэффициентом грузовой устойчивости и обозначается буквой  (при расчете грузовой устойчивости) или коэффициентом собственной устойчивости
(при расчете грузовой устойчивости) или коэффициентом собственной устойчивости  (при расчете собственной устойчивости).
(при расчете собственной устойчивости).
Тема 8. Расчет ленточного конвейера (3 ч)
Дата добавления: 2015-02-13; просмотров: 4139;