Пуск, реверсирование и динамическое торможение двигателя постоянного тока
Из основного уравнения двигателя (2.21) следует, что ток потребляемый двигателем во время пуска значительно превышает номинальный рабочий ток. В момент пуска в обмотке неподвижного якоря отсутствует противо-ЭДС и, следовательно, пусковой ток:
 (2.25)
(2.25)
Активное сопротивление обмотки якоря мало и пусковой ток может превышать номинальный рабочий ток в 8 – 10 и более раз.
Прямой пуск путем подачи на якорь номинального напряжения применяется только для двигателей небольшой мощности (до 1 – 2 кВт). Разгон таких двигателей происходит быстро (в течение 0,1 – 0,3 с) и обмотка якоря не успевает значительно нагреться. При прямом пуске мощных двигателей большой пусковой ток приводит к повышенному износу щеток и коллектора и перегреву обмотки якоря. Кроме того большие токи при пуске мощных двигателей вредно отражаются на работе других потребителей, подключенных к сети.
Применяются следующие способы пуска мощных двигателей.
1. Постепенным повышением напряжения, подаваемого на якорь двигателя.
2. Включением в цепь якоря пускового реостата, сопротивление которого по мере разгона двигателя, постепенно уменьшается от начального значения до нуля. Сопротивление пускового реостата RП выбирается таким чтобы начальный пусковой ток IН = UЯ / ( RП + RЯ) превышал номинальный в 1.5 … 2 раза.
3. Включением в цепь якоря дросселя соответствующей индуктивности, что обеспечивает плавное нарастание тока в течение времени, определяемого индуктивностью дросселя.
Реверсирование – процесс изменения направления вращения двигателя – осуществляется изменением направления тока в якоре (полярности напряжения UЯ) при неизменной полярности полюсов или изменением направления тока возбуждения (полярности напряжения, подводимого к обмотке возбуждения) при неизменном направлении тока в якоре.
При отключении двигателя его якорь еще некоторое время вращается по инерции. Ели необходимо обеспечить быструю и точную остановку двигателя применяют механическое или электрическое торможение. На электротранспорте довольно широко применяется генераторное торможение с возвратом электрической энергии в питающую сеть. В электроприводах технологического оборудования (в том числе сварочного) широко применяется динамическое торможение. Схема, поясняющая динамическое торможение, приведена на рис. 2.17.
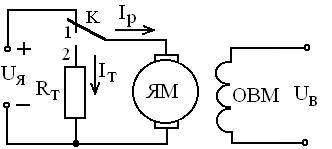
Рисунок 2.17 – Схема динамического торможения двигателя
Если переключающий контакт К находится в положении 1 на якорь двигателя подано напряжение UЯ и двигатель вращается со скоростью, определяемой этим напряжением. При переключении контакта К в положение 2 якорь отключается от цепи питания и замыкается на резистор RТ. Пока двигатель вращается по инерции в якоре индуктируется ЭДС  и в цепи якоря и тормозного резистора протекает ток IТ = ЕЯ/(RЯ+RТ), направление которого противоположно рабочему току IР. Этот ток создает момент торможения:
и в цепи якоря и тормозного резистора протекает ток IТ = ЕЯ/(RЯ+RТ), направление которого противоположно рабочему току IР. Этот ток создает момент торможения:
 (2.26)
(2.26)
Интенсивность торможения определяется сопротивлением резистора RТ .
Тормозной резистор должен выбираться таким, чтобы тормозной ток в начале торможения не превышал допустимого значения. У двигателей малой мощности (до 120 – 180 Вт) обмотка якоря имеет достаточно большое сопротивление и в режиме торможения может замыкаться накоротко (RТ=0).
Дата добавления: 2015-02-10; просмотров: 1293;