Работа машины постоянного тока в режиме двигателя
При работе машины постоянного тока в режиме двигателя обмотка якоря подключается к источнику постоянного тока UЯ.
Вследствие взаимодействия тока протекающего в активных проводниках обмотки якоря с магнитным потоком возбуждения на валу машины возникает момент электромагнитных сил (см.2.16), который при работе машины в режиме двигателя является вращающим моментом
MЕ = CмФIя, (2.20)
Якорь двигателя начинает вращаться в направлении определяемом направлением вектора вращающегося момента. Для изменения направления вращения следует изменить либо направление тока в якоре (полярность напряжения подведенного к якорю), либо направление магнитного потока возбуждения (полярность напряжения подведенного к обмотке возбуждения).
Двигатели постоянного тока могут включаться (см. рис. 2.13), по схемам с независимым, параллельным), последовательным или смешанным возбуждением. Применяются также двигатели с возбуждением от постоянных магнитов.
Схемы с параллельным, последовательным и смешанным возбуждением применяются в основном в приводах с нерегулируемой или регулируемой в небольших пределах скоростью вращения. В регулируемых приводах как правило применяются двигатели с независимым возбуждением или с постоянными магнитами.
При вращении якоря в его обмотке индуктируется ЭДС EЯ определяемая выражением (2.13). У двигателя эта ЭДС является противоэлектродвижущей силой и направлена против напряжения, подведенного к якорю.
Напряжение, подведенное к якорю, уравновешивается этой противо - ЭДС и падением напряжения на активном сопротивлении якоря.
 (2.21)
(2.21)
Отсюда находим уравнение частотной (скоростной) характеристики двигателя n(IЯ).
 (2.22)
(2.22)
Подставляя в (2.22) IЯ из (2.20) получаем уравнение механической характеристики двигателя n(M).
 (2.23)
(2.23)
Из уравнения (2.23) следует, что скорость вращения можно регулировать следующими способами
1. Изменением сопротивления цепи якоря. Способ легко реализуется включением реостата последовательно в цепь якоря. Однако этот способ во первых не экономичен, вследствие потерь энергии в реостате, а кроме того снижает жесткость механических характеристик (усиливается зависимость скорости от момента нагрузки). На рис. 2.16 приведены механические характеристики двигателя при отсутствии (RР =0) и наличии (RР >0) регулировочного сопротивления RР в цепи якоря.
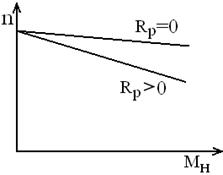
Рисунок 2.16 – Механические характеристики двигателя
2. Изменением магнитного потока возбуждения путем изменения напряжения на обмотке возбуждения. Однако при этом регулировочная характеристика является нелинейной, а кроме того при изменении потока возбуждения изменяется вращающий момент на валу двигателя.
3. Изменением напряжения подводимого к якорю. Данный способ является наиболее рациональным, так как обеспечивает регулирование скорости в широких пределах при сохранении практически неизменным вращающего момента и сохранении жесткости механических характеристик.
Способ чаще всего реализуется применением управляемого тиристорного выпрямителя или транзисторного импульсного регулятора напряжения с широтно – импульсной модуляцией.
Двигатель постоянного тока обладает свойством саморегулирования – при изменении нагрузки автоматически устанавливается новое значение скорости, при которой двигатель работает устойчиво. Роль регулятора играет противо – ЭДС в обмотке якоря. В установившемся режиме вращающий электромагнитный момент двигателя равен статическому моменту нагрузки
(МЕ = МС). Ток, потребляемый двигателем, в соответствии с (2.20), определяется моментом на валу двигателя:
 (2.24)
(2.24)
Статический момент нагрузки МС включает в себя момент нагрузки МН и момент потерь холостого хода М0 , обусловленный трением в подшипниках, трением щеток и потерями в якоре на вихревые токи.
C ростом момента на валу уменьшается (см. 2.23) скорость вращения двигателя n и противо – ЭДС Е, а потребляемый ток будет возрастать, пока при новом значении скорости не восстановится равенство (2.21). При уменьшении момента на валу уменьшится ток IЯ , что, в соответствии с (2.21) приведет (при UЯ = const) к возрастанию Е за счет роста скорости.
Таким образом изменение момента нагрузки приводит к некоторому изменению скорости вращения двигателя, то есть механическая характеристика двигателя n = f(MН) является пологопадающей. Для обеспечения стабильной скорости вращения (жесткости механической характеристики) электропривод следует выполнять с системой стабилизации скорости (частоты) вращения.
Дата добавления: 2015-02-10; просмотров: 1997;