Средства и способы плавного регулирования в приводных системах.
А. Устройства плавного (мягкого) пуска(УПП) эффективно применять при эксплуатации компрессоров, насосов, конвейеров, вентиляторов и нагнетателей, а также при пуске различных потребителей от слабых источников (дизель - генераторов, длинных сетей питания). Общей целью использования УПП для пуска двигателей в этих установках является ограничение токов в начальные моменты разгона. Например, величина тока в цепи якоря двигателя постоянного тока Iа = (Uc - C∙n∙Ф) / rа [В.Е.Китаев, А.А.Бокуняев, М.Ф.Колканов, Электропитание устройств связи, изд-во «СВЯЗЬ», М., 1975]в режиме установившегося вращения равна номинальному значению, которое соответствует моменту на валу двигателя. Иначе это соотношение проявляется при пуске, когда число оборотов вала машины n= 0. Практически всё напряжение сети приложено к якорной цепи и, в силу малости её сопротивленияrа, по этой цепи протекает пусковой ток большой величины. Возникающие броски тока нагружают сеть, приводят к нарушению теплового режима обмоток двигателя и электрической прочности изоляции, возникающие ускорения создают угрозу работоспособности машины и приводимых ею устройств.
Назначение устройств плавного пуска – обеспечить ограничение величины пускового тока до безопасных значений за счёт регулируемого и плавного подъёма напряжения питания двигателя на этапе пуска . Как правило это реализуется применением тиристорного регулирования напряжения (рис.5.6). Для этого в схеме УПП типа Триол АС11[Корпорация Триол, КАТАЛОГ продукции и применений, 2002] использован трёхфазный тиристорный коммутатор (ТК), подачу управляющих сигналов на который выполняет микропроцессорный контроллер (МК) через формирователь импульсов (ФИ), оба из которых входят в общую систему управления (СУ).
В УПП регулирование напряжения выполняет подчинённую роль, оно используется лишь как средство воздействия на величину тока статорных обмоток двигателя. Главная задача состоит в поддержании заданного значения тока в течение всего времени разгона. Для этого датчиками тока ДТ 1 и ДТ 2, выполненными на трансформаторах тока, измеряются фактически протекающие токи. На основе сравнения их с заданной характеристикой разгона МК корректирует подаваемое на двигатель напряжение.
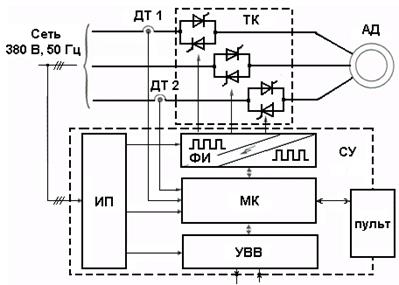
Рис.5.6
Наличие датчиков тока позволяет также обеспечивать защиту двигателя от перегрузок и коротких замыканий.
После окончания пуска, когда отпадает необходимость в регулировании напряжения, тиристорные группы ТК могут замыкаться накоротко либо контактами встроенного шунтирующего реле, либо двигатель по команде УПП переключается внешним контактором К на непосредственное питание от сети (рис. 5.7).
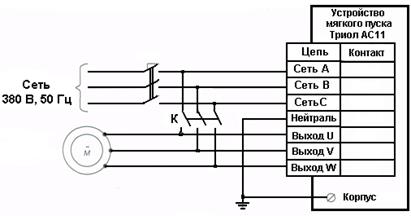
Рис.5.7
При выборе типа УПП для конкретного применения следует учитывать следующие соображения [Приводная техника].
· Ток мотора: 50 ÷ 100% тока УПП.
· Ограничение тока в режиме пуска в диапазоне от 0 до (80-100)% разгона машины до уровня 400% тока мотора, т.е. ток мотора при пуске не должен превышать 4-х номинальных значений.
· Время разгона: 2 ÷ 30 сек, для тяжелого пуска [Триол] – до 60 сек.
· Частота включений / час: 10 (равномерно).
ВНИМАНИЕ!Несмотря на несомненные достоинства устройств плавного пуска, их использование рекомендуется не для всех видов нагрузки. Существуют применения, для которых выбирать УПП нежелательно, если даже не более того.
Б.Для плавного управления частотой вращения асинхронных двигателей широко применяются частотные преобразователи (ЧП), которые являются практически специализированными устройствами для такого применения. Скорость вращения вала двигателя изменяется за счёт того, что его обмотки питаются напряжениями плавно изменяемой частоты, которые вырабатываются частотным преобразователем из постоянного напряжения. Работу силовой части преобразователя можно представить в виде структуры на рис.5. 8.
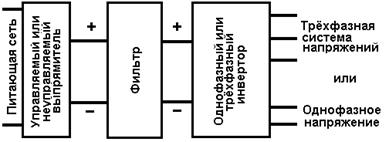
Рис.5.8
Однофазное или трёхфазное напряжение питающей сети выпрямляется выпрямителем и сглаживается для уменьшения пульсаций фильтром. После этого инвертор (преобразователь постоянного напряжения в переменное) формирует из него переменное напряжение, частота которого может управляться в заданных пределах. Это напряжение питает обмотки двигателя, частота вращения вала которого будет совпадать с частотой питающего напряжения.
С точки зрения терминологии и степени реализации различных возможностей управления можно выделить следующие варианты.
- Если на входе преобразователя включен управляемый выпрямитель, позволяющий изменять амплитуду выпрямленного напряжения, а инвертор работает в режиме формирования напряжения фиксированной частоты, но разной амплитуды, то такой способ работы следует считать амплитудным управлением. Такой вариант широко применяется и для управления двигателями постоянного тока, когда не требуется применения ни фильтра, ни инвертора.
- В другом случае, когда выпрямитель на входе является неуправляемым и используется только для бестрансформаторного получения постоянного напряжения, а инвертор формирует переменное напряжение неизменной амплитуды, но управляемое по частоте, получается частотное управление, которое уже применимо для частотного управления асинхронными двигателями.
- И только в том случае, когда одновременно используются возможности и амплитудного, и частотного управления, получается функционально наиболее полный принципамплитудно – частотного управленияасинхронным двигателем.
Инвертор напряжения по месту расположения компонентов напоминает выпрямительный мост с той лишь разницей, что постоянное напряжение питания инвертора Е0 подключено к тем зажимам, с которых у выпрямителя снимается напряжение нагрузки, а нагрузка инвертора, соединённая звездой или треугольником, подключена к точкам, на которые в выпрямителях подаётся трёхфазная система сетевого напряжения (рис.5. 9,а) [В.В. Москаленко, Электрический привод, М.,2000].
Другой, не менее важной особенностью инверторов является то, что вместо неуправляемых диодов, на которых может быть построен выпрямитель, инвертор строится на основе управляемых ключей: тиристоров или (при меньших мощностях) - транзисторов.
Управляемость вентилей при включении обеспечивает возможность переключать в определённой последовательности ветви инвертора (рис.5.9, б), где обозначены временные интервалы нахождения всех вентилей инвертора в открытом состоянии.
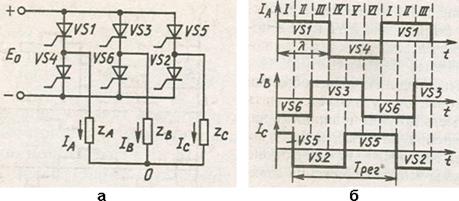
Рис. 5. 9
Основными принципами управления инвертором являются:
- два ключа одной фазы включаются поочерёдно в течение периода выходной частоты, следовательно, интервал проводимости каждого из них равен π радиан.
- ключи соседних фаз работают таким же образом, но со сдвигом по фазе на 2π /3 радиан (120о) друг относительно друга.
- одновременно в каждый момент времени в открытом состоянии находятся три ключа – по одному в каждой фазе. За счёт этого в каждый момент времени все фазы нагрузки подключены к постоянному напряжению питания инвертора Е0 , и по ним течёт ток.
Включенные состояния вентилей чередуются в определённой последовательности (рис.5.9,б), поэтому работу схемы можно представить поочерёдной сменой нескольких отличающихся друг от друга режимов. Схема замещения для одного из них имеет вид рис. 5.10
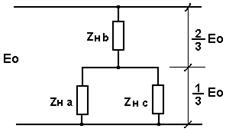
Рис.5.10
Из-за параллельного соединения нагрузок фаз A и C их общее сопротивление в два раза меньше, чем сопротивление нагрузки фазы В, поэтому и напряжение Е0 поделится между ветвями в соотношении 2 / 1. Чередование таких режимов, в которых к одной фазной нагрузке прикладывается напряжение в два раза большее, чем к двум другим, определяет формы кривых напряжений, реально выделяющихся на нагрузках инвертора (рис.5.11)
Изменяя длительность включенного состояния вентилей, регулируют частоту f формируемого напряжения на выходах инвертора, которая в свою очередь с погрешностью в несколько процентов из-за наличия скольжения определяет скорость вращения N питающегося этим напряжением двигателя: N = 60 * f / p, где p –число пар полюсов [Ю.К.Розанов, Е.М.Соколова, Электронные устройства электромеханических систем, М., ACADEMIA,2004 неправда, я взял это уже у Егорыча, а там была формула, по которой ничего не сходилось].
При регулировании частоты приходится также регулировать и напряжение источника питания Е0 вследствие того, что из примерного равенства Е0 = c ∙ Ф ∙ fследует: чтобы магнитный поток Ф в зазоре был постоянен при всех генерируемых частотах , надо поддерживать постоянство отношения(Е0 / f). Если при неизменном напряжении питания Е0уменьшится частотаf, то поток увеличится, из-за насыщения магнитопровода возрастёт ток намагничивания, двигатель станет перегреваться. Если частотаfувеличится, то станет меньше магнитный поток, возникает эффект недоиспользования стали и снижается максимальный момент на валу машины. Поэтому частотное управление асинхронными двигателями приходится выполнять методами амплитудно – частотного управления.
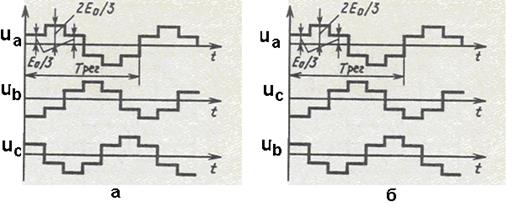
Рис.5.11
Так как инвертор управляется встроенным микропроцессором, не представляет трудностей изменять последовательность, с которой отдельные ветви инвертора подключаются к общему источнику питания постоянного напряжения. В результате этого получают два вида трёхфазных напряжений, формируемых инвертором. На рис.5.11, а фазные напряжения, отстающие друг от друга по фазе на 120 градусов, чередуются в последовательности А – В – С. В отличие от этого на рис. 5.11, б две фазы (В и С) поменялись местами, что привело к изменению последовательности чередования фаз на А – С – В. В итоге это означает одно: обеим системам напряжения, изображённым на рис. 5. 11, соответствуют противоположные направления вращения вала машины.
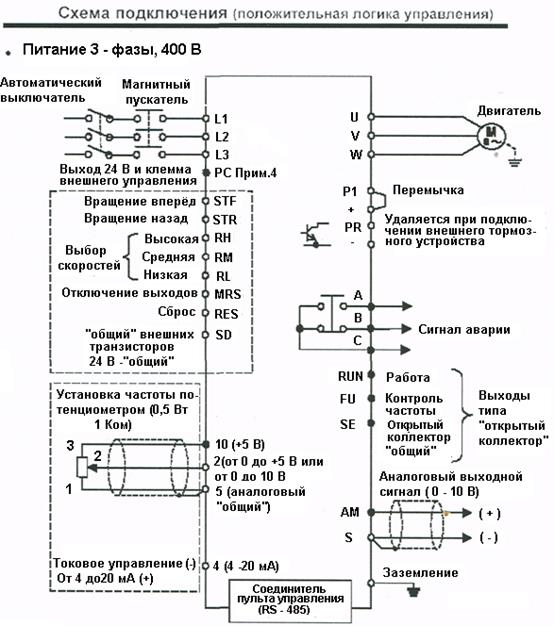
Рис.5.12
На практике управление направлением вращения вала машины осуществляется подачей управляющего сигнала с контроллера на один из входов частотного преобразователя: STF (Вращение вперёд) или STR (Вращение назад). Эти входы показаны на схеме подключения частотного преобразователя FR-E540-1.5K-EC фирмы Mitsubishi Electric, приведённой на рис. 5.12.
Трёхфазное напряжение питания ЧП подаётся по входным линиям L1, L2, L3, а двигатель, являющийся нагрузкой ЧП, подключается к выводам U, V, W. Учитывая то, что частотный преобразователь является, к сожалению, достаточно сильным источником помех, между питающей сетью и ЧП в некоторых приложениях может потребоваться применение специальных модулей защиты от помех. В этих случаях напряжение сети подаётся на клеймы L1, L2, L3 модуля защиты от помех, а его выходы L1′, L2′, L3′ подключаются к питающим входамL1, L2, L3частотного преобразователя.
Выбор той или иной скорости вращения вала двигателя осуществляется подачей сигнала +24 В на соответствующий вход (RH, RMили RL) выбора скоростей. Задание числовых значений этих скоростей, а также времени разгона (tраз) и торможения (tтор) двигателя устанавливается в параметрах ЧП.
Предусмотрены возможности плавного управления скоростью вручную от потенциометра и в автоматическом режиме подачей токового сигнала от 4 до 20 mA.
Рассмотренные в этом разделе схема инвертора (рис.5.12) и способ управления им дают представление о принципе получения трёхфазного напряжения регулируемой частоты из постоянного напряжения питания. Для управления инверторами на уровне, в наибольшей степени соответствующем современному состоянию техники, используются более совершенные алгоритмы, так, например, в [Triol] можно найти сведения об алгоритме высокочастотного асинхронного ШИМ – управления транзисторным (IGBT) инвертором.
В.Из рассмотрения назначения и возможностей частотных преобразователей может сложиться впечатление, что один ЧП может обеспечить управление только одним двигателем. Из соображений минимизации затрат на проектируемую систему было бы желательно эффективней использовать такую функционально мощную структуру, как частотный преобразователь.
Если по принципу работы объекта удаётся выделить интервалы времени, в которых ЧП свободен от управления «своим» двигателем, возникает естественное намерение в этих паузах использовать его для управления другой машиной. Для этого достаточно переключить его выходы на питание другой нагрузки; возникает только вопрос выбора подходящего коммутатора. Использовать для этих целей магнитные пускатели и контакторы неудобно, т.к. из- за невысокого быстродействия, искрения при коммутациях и ограниченного ресурса по числу срабатываний они больше применимы для нечастых переключений с длительным нахождением во включенном состоянии.
Для рассматриваемого применения больше подошли бы коммутаторы быстродействующие, желательно бесконтактные, выключающиеся без разрыва тока нагрузки, т.е. при переходе мгновенных значений тока через ноль, и потому не создающие больших помех. Такие коммутаторы есть, их называют твердотельными реле, они поставляются в виде функционально законченных модулей, и некоторые фирмы проявляют готовность выполнять их по спецзаказу на конкретные применения.
На рис. 5.13показаны схема и внешний видреле твердотельноготрёхфазного переменного тока 5П36. 30ТСА1-10-8-Д1(Д 2).
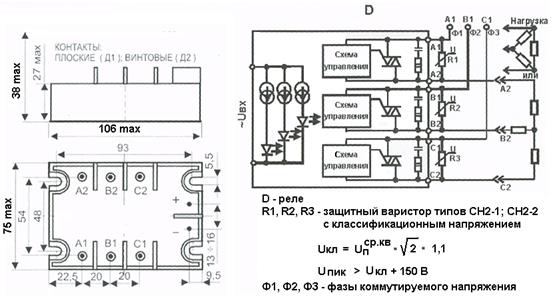
Рис.5.13
Между входными зажимами А1, В1, С1, к которым подключается коммутируемое напряжение трёх фаз Ф1, Ф2, Ф3, и выходными, с которыми в точках А2, В2, С2 соединена нагрузка, включены тиристорные ключи. При подаче управляющего сигнала ~Uвх тиристоры открываются и замыкают цепи подключения питающих напряжений к нагрузке. При снятии сигналаUвхтиристоры закроются, и нагрузка будет обесточена.
На рис. 5.14 показано, как это можно использовать для управления двумя двигателями от одного частотного преобразователя путём поочередного переключения его выхода на питание одного или другого двигателя.
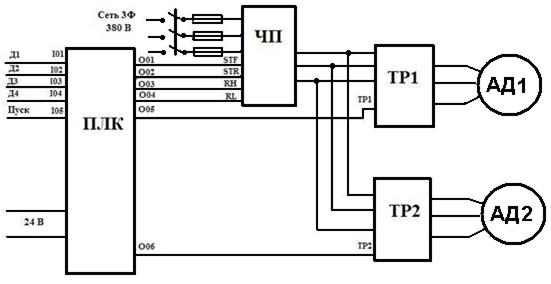
Рис.5.14
Если по выходной цепи O 01 контроллера ПЛК (рис.5.14) на вход STF (вращение вперёд) частотного преобразователя поступит управляющий сигнал, ЧП начнёт формировать трёхфазную систему напряжений c последовательностью чередования фаз, допустим, A – B – C. Под действием этого напряжения двигатель АД1 при включенном состоянии ТР1, имеющем место при активном сигнале с выхода O 05 контроллера ПЛК на ТР1, станет вращать вал продольного перемещения некоторого подвижного механизма в поступательном перемещении вперёд. При этом же напряжении, если будет включен не ТР1, а ТР2 выходным сигналом О 06 с ПЛК, двигатель АД2 будет вращать сопряжённый с ним вал поперечного перемещения каретки, допустим, вправо. Как видим, одним частотным преобразователем путём поочерёдного включения твердотельных реле удаётся управлять двумя двигателями, обеспечивая перемещение подвижного механизма по двум осям координат.
В том случае, когда управляющий сигнал контроллера появляется на входе STR частотного преобразователя, формируемая ЧП система напряжений изменит последовательность чередования фаз на A – C – B, что равносильно изменению направления вращения того двигателя, который будет в данный момент питаться этим напряжением через включенное «своё» твердотельное реле. За счёт этого двигатель АД1 будет способен перемещать каретку назад,а двигатель АД2 – влево, дополняя ранее реализованные направления перемещения до полнофункционального реверсивного управления двух двигателей от одного частотного преобразователя.
Если интервалы перемещений в любом из направлений разнесены во времени, то никаких проблем в работе возникнуть не должно: надо лишь запрограммировать контроллер на своевременную выдачу управляющих сигналов, что также несложно.
Дата добавления: 2015-02-07; просмотров: 1831;