Реостатные преобразователи
Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины. Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной величиной – сопротивление.
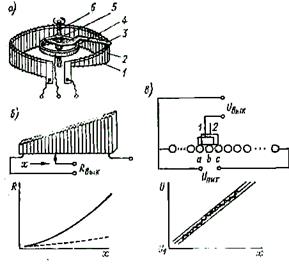
На рис.2-9, а показано устройство реостатного преобразователя. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6.
Реостатные преобразователи выполня-ются как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной коррози-онной стойкостью и износостойкостью; применяется также манганин, константан, фехраль. Микропровод позволяет выполнять миниатюрные преобразователи, имеющие габариты до 5 х 5 мм.
 Формы каркасов очень разнообразны: они могут быть в виде пластины, цилиндра, кольца и т.д. Выбирая форму каркаса, можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением, как показано примера на рис. 2-9, б. Выходное сопротивление реостатного преобразователя, периметр каркаса р и входное перемещение х связаны между собой зависимостью:
Формы каркасов очень разнообразны: они могут быть в виде пластины, цилиндра, кольца и т.д. Выбирая форму каркаса, можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением, как показано примера на рис. 2-9, б. Выходное сопротивление реостатного преобразователя, периметр каркаса р и входное перемещение х связаны между собой зависимостью:
 ,
,
где r – сопротивление 1 м провода; w0– число витков на единицу длины преобразователя.
Из заданной зависимости R=j(х) можно определить зависимость р =f (х).
Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преобразователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. При перемещении движка преобразователя на расстояние l, соответствующее w виткам, будут иметь место 2w ступенек, однако эти ступеньки неодинаковы по длине преобразователя.
Рассмотрим в качестве примера выходную характеристику преобразователя, включенного в режиме делителя напряжения, как показано на рис. 2-9, в. В положении 1 движок, имеющий ширину 2d, где d – диаметр витка, замыкает накоротко витки а и b, и выходное напряжение:
 ,
,
где w0 — полное число витков и п – число витков до витка а. При смещении движка на расстояние d/2, т.е. в положение 2, движок замыкает накоротко три витка а, b и с, и выходное напряжение  ; при смещении движка еще на d/2выходное напряжение
; при смещении движка еще на d/2выходное напряжение  . Размер ступенек напряжения при перемещении движка на расстояние d/2 будет зависеть от n: первая ступенька с увеличением п увеличивается, а вторая – уменьшается, сумма остается постоянной:
. Размер ступенек напряжения при перемещении движка на расстояние d/2 будет зависеть от n: первая ступенька с увеличением п увеличивается, а вторая – уменьшается, сумма остается постоянной:  . Выходное напряжение преобразователя показано на рис. 2-9, в.
. Выходное напряжение преобразователя показано на рис. 2-9, в.
Дополнительное расширение полосы неопределенности происходит за счет шума, «генерируемого» движком при его движении (вариации контактного сопротивления, временное разъединение движка и контактной дорожки, ЭДС трения и т.д.). Поэтому в целом погрешность нуля реостатных преобразователей оценивается значением ± (2/w ¸ 1/w).
Измерительные цепи, в которые включаются реостатные преобразователи, питаются преимущественно постоянным напряжением, но могут питаться и переменным напряжением. Напряжение питания преобразователя определяется его допустимой мощностью (для самых малогабаритных преобразователей допустимая мощность составляет не менее 0,1 Вт) и сопротивлением. Напряжение питания, как правило, стабилизируется. Наиболее распространенным является включение преобразователя в виде управляемого делителя напряжения или включение преобразователя в измерительный мост. Номинальное изменение сопротивления реостатного преобразователя достигает 90%, поэтому необходимо учитывать нелинейность, вносимую измерительной схемой, и, исходя из допустимой погрешности линейности, выбирать сопротивление измерительного прибора.
Дата добавления: 2015-01-26; просмотров: 3781;