Контактные преобразователи и преобразователи контактного сопротивления
Контактными называются измерительные преобразователи неэлектрических величин, в которых измеряемое механическое перемещение преобразуется в замкнутое или разомкнутое состояние контактов, управляющих электрической цепью. Таким образом, естественной входной величиной контактных преобразователей является перемещение.
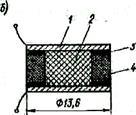
Однопредельный контактный преобразователь показан на рис. 2-8, а и имеет одну пару контактов 4 и 5, замыкание которых происходит в функции измеряемого перемещения, например изменения размера изделия 1. При увеличении размера изделия шток 3 переместится в направляющих 2 и укрепленный на нем контакт 4 войдет в соприкосновение с контактом 5. При этом сопротивление между контактами 4 и 5 изменится от бесконечности до малого значения, определяемого значением контактного сопротивления.
Рис. 2-8
 |
 В измерительной технике в цепях коммутации широко применяются магнитоуправляемые контакты, называемые герконами. В стеклянном баллоне, имеющем диаметр около 3 мм и длину около 20 мм, помещаются контактные пластины. Переключаемые токи составляют 5×10-6 – 0,5 А при напряжениях до 220 В. Исследования, проведенные Я.В. Петерсоном, показали, что сопротивление между контактами в замкнутом состоянии не превышает 0,1 Ом, в разомкнутом состоянии – не менее 109 Ом, емкость между контактами 0,4 пФ, индуктивность 0,5–1,5 мкГн. При замыкании контактов наблюдается в среднем шесть отскоков и время дребезга контактов составляет 100–120 мкс. Дребезг контактов приводит к возникновению дополнительного шума. Кроме того, при наличии разницы температур между выводами контакта приходится учитывать термо-ЭДС, которая составляет около 40 мкВ при температурном градиенте 1 К.
В измерительной технике в цепях коммутации широко применяются магнитоуправляемые контакты, называемые герконами. В стеклянном баллоне, имеющем диаметр около 3 мм и длину около 20 мм, помещаются контактные пластины. Переключаемые токи составляют 5×10-6 – 0,5 А при напряжениях до 220 В. Исследования, проведенные Я.В. Петерсоном, показали, что сопротивление между контактами в замкнутом состоянии не превышает 0,1 Ом, в разомкнутом состоянии – не менее 109 Ом, емкость между контактами 0,4 пФ, индуктивность 0,5–1,5 мкГн. При замыкании контактов наблюдается в среднем шесть отскоков и время дребезга контактов составляет 100–120 мкс. Дребезг контактов приводит к возникновению дополнительного шума. Кроме того, при наличии разницы температур между выводами контакта приходится учитывать термо-ЭДС, которая составляет около 40 мкВ при температурном градиенте 1 К.
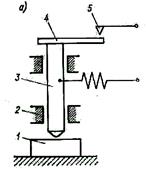
Преобразователи контактного сопротивления основаны на изменении под действием давления сопротивления между проводящими элементами, разделенными слоями полупроводящего материала. Преобразователь может быть выполнен в виде столбика из ряда слоев электропроводящей бумаги, электропроводящей резины или металлических пластин, на которые путем напыления нанесен высокоомный резистивный слой. Преобразователи контактного сопротивления имеют большие погрешности гистерезиса и линейности (до 10%), но очень просты конструктивно, имеют высокую надежность и достаточную выходную мощность. На рис.2-8, б показана схематическая конструкция преобразователя, применяемого в биоэлектрическом протезе, где 1 – электрод; 2 – электропроводящая пластина; 3 – клей; 4 – изолятор из резины. При изменении давления от 0 до 105 Па сопротивление изменяется от 100 до 2 кОм при деформации чувствительного элемента до 50%, допустимая мощность рассеяния 0,5 Вт. Подобные преобразователи используются в тактильных датчиках роботов и манипуляторов.
Дата добавления: 2015-01-26; просмотров: 2061;