ДИНАМИКА ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
2.2.1. Незатухающий гармонический осциллятор.Познакомимся теперь с динамическим аспектом возникновения гармонических колебаний. Рассмотрим пример. Шарик массы  под действием пружины совершает горизонтальное движение без трения (рис. 2.1). Каков характер движения шарика?
под действием пружины совершает горизонтальное движение без трения (рис. 2.1). Каков характер движения шарика?
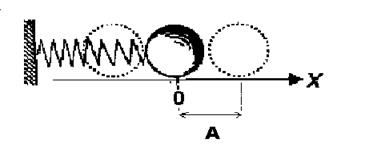
Рис. 2.1. Движение шарика под действием пружины
Если смещение  шарика из положения равновесия достаточно мало, то сила, с которой деформированная пружина будут действовать на шарик, подчиняется закону упругих деформаций (Гука)
шарика из положения равновесия достаточно мало, то сила, с которой деформированная пружина будут действовать на шарик, подчиняется закону упругих деформаций (Гука)  . Напишем для шарика уравнение движения в форме второго закона Ньютона:
. Напишем для шарика уравнение движения в форме второго закона Ньютона:
 , (2.1)
, (2.1)
 ,
,
где – смещение относительно положения равновесия,  – положительный коэффициент, зависящий от упругих свойств пружины. Положим
– положительный коэффициент, зависящий от упругих свойств пружины. Положим
 , (2.2)
, (2.2)
 . (2.3)
. (2.3)
Полученное нами линейное дифференциальное уравнение второго порядка (2.3) совпадает с уравнением (1.10).
Общее решение (2.3) таково:
 , (2.4)
, (2.4)
а  , (2.5)
, (2.5)
где произвольные постоянные  и
и  определяются начальными услови
определяются начальными услови
ями. Пусть в момент времени  смещение
смещение  , а скорость
, а скорость  . Тогда, подставляя
. Тогда, подставляя  в (2.4) и (2.5), получим
в (2.4) и (2.5), получим  ;
;  . Окончательно, общее решение уравнения (2.3) имеет вид:
. Окончательно, общее решение уравнения (2.3) имеет вид:
 . (2.6)
. (2.6)
Это же решение может быть также записано как (1.2):
 . (2.7)
. (2.7)
Поскольку  , то сравнение (2.6) с (2.7) дает систему из двух уравнений для определения амплитуды колебаний и начальной фазы:
, то сравнение (2.6) с (2.7) дает систему из двух уравнений для определения амплитуды колебаний и начальной фазы:
 (2.8)
(2.8)
Возведем в квадрат каждое из уравнений, а затем сложим их левые и правые части:
 и
и  . (2.9)
. (2.9)
Разделив второе уравнение на первое, получим для  :
:
 . (2.10)
. (2.10)
Таким образом, мы установили, что под действием упругой силы в отсутствии трения шарик совершает гармонические колебания (рис. 2.2):
 . (2.11)
. (2.11)
Рис. 2.2. График синусоиды
Механические колебания, возникающие под действием сил, развивающихся в самой колебательной системе, носят название собственных или свободных колебаний. Они возникают при всяком нарушении равновесия системы.
Амплитуда и фаза собственных колебаний определяются только начальными условиями. Циклическая частота не зависит от начальных условий и определяется свойствами самой системы. Физическая система, которая описывается дифференциальным уравнением вида (2.3), называется гармоническим осциллятором.
2.2.2. Математический маятник. Под «математическим маятником» понимают идеализированную систему – небольшое тело, подвешенное на столь длинной нити, что размерами тела по сравнению с длиной нити можно пренебречь.
Для решения задачи о движении маятника воспользуемся уравнением динамики вращательного движения твердого тела:
 . (2.12)
. (2.12)
Здесь  – момент инерции маятника относительно оси – так называемой оси моментов, проходящей через точку подвеса перпендикулярно
– момент инерции маятника относительно оси – так называемой оси моментов, проходящей через точку подвеса перпендикулярно
к плоскости качаний маятника (рис. 2.3),  – угловая скорость вращения,
– угловая скорость вращения,  – момент сил, действующих на маятник, относительно той же оси.
– момент сил, действующих на маятник, относительно той же оси.
Рис. 2.3. Математический маятник
Будем считать, что силы трения, возникающие при движении маятника (сопротивление воздуха, трение на оси) пренебрежимо малы. Момент силы натяжения нити относительно этой оси равен нулю. Величина момента силы тяжести равна:
 (2.13)
(2.13)
где – масса маятника,  – длина нити,
– длина нити,  – угол отклонения от вертикали. Знак минус взят потому, что момент силы тяжести сообщает маятнику угловое ускорение, противоположное угловому отклонению. Пренебрегая размерами тела, мы можем считать, что масса маятника сосредоточена
– угол отклонения от вертикали. Знак минус взят потому, что момент силы тяжести сообщает маятнику угловое ускорение, противоположное угловому отклонению. Пренебрегая размерами тела, мы можем считать, что масса маятника сосредоточена
в точке, т. е.  . Помимо этого
. Помимо этого  , мы получаем:
, мы получаем:
или  . (2.14)
. (2.14)
Это уравнение движения маятника справедливо для любого угла (любой амплитуды). Оно не дает гармонического колебания, получаются не синусоидальные колебания, период которых зависит от амплитуды (колебания асинхронны). Если же ограничиться рассмотрением таких движений, при которых угол очень мал, то в этом случае можно положить  и тогда:
и тогда:
 . (2.15)
. (2.15)
Уравнение (2.15) совпадает по форме с (2.3), причем  . Его решением будет
. Его решением будет
 .
.
Период колебаний математического маятника не зависит от его
массы:
 . (2.16)
. (2.16)
Между системами, описываемыми уравнениями (2.3) и (2.15) имеется глубокое физическое отличие. Сила, возвращающая шарик к положению равновесия, есть упругая сила пружины, в то время как маятник возвращается к положению равновесия под действием тангенциальной составляющей силы тяжести. В первом случае частота зависит от массы шарика, а во втором не зависит от массы маятника. Сопоставление формул  и
и  показывает, что в случае маятника аналогом является
показывает, что в случае маятника аналогом является  , аналогом массы шарика - длина маятника
, аналогом массы шарика - длина маятника  , а не его масса. По своей природе физические величины и , и являются совершенно разными. Однако с точки зрения теории колебаний отличие между ними исчезает и изученные механические системы эквивалентны друг другу.
, а не его масса. По своей природе физические величины и , и являются совершенно разными. Однако с точки зрения теории колебаний отличие между ними исчезает и изученные механические системы эквивалентны друг другу.
2.2.3. Электрический колебательный контур. Рассмотрим пример электрических колебаний. На схеме (рис. 2.4) условно изображен контур, состоящий из последовательно соединенных емкости  и индуктивности
и индуктивности  , но не обладающий электрическим сопротивлением. Отсутствие сопротивления – важнейшая из тех идеализаций, которые лежат в основе нашего изучения.
, но не обладающий электрическим сопротивлением. Отсутствие сопротивления – важнейшая из тех идеализаций, которые лежат в основе нашего изучения.
Разность потенциалов между обкладками конденсатора  , где
, где  – заряд одной из обкладок, равна электродвижущей силе самоиндукции
– заряд одной из обкладок, равна электродвижущей силе самоиндукции  , возникающей в катушке, – сила тока в катушке:
, возникающей в катушке, – сила тока в катушке:
Рис. 2.4. Электрический колебательный контур
 ,
,
но сила тока связана с зарядом конденсатора соотношением:
 .
.
Итак, дифференциальное уравнение колебаний заряда в контуре имеет вид:
 . (2.17)
. (2.17)
Разделив на , получим:
или, положив  , (2.18)
, (2.18)
 . (2.19)
. (2.19)
Уравнение (2.19) имеет тот же вид, что и (2.3). Если конденсатор имеет начальный заряд или если в катушке возбужден начальный ток (например, в результате движения магнита около катушки), в контуре происходят электрические гармонические колебания:
 . (2.20)
. (2.20)
Пусть  – начальная величина заряда конденсатора и пусть в начальный момент времени сила тока равна нулю:
– начальная величина заряда конденсатора и пусть в начальный момент времени сила тока равна нулю:
 .
.
Имеем  . Это дает
. Это дает  , после чего решение (2.20) принимает следующий окончательный вид:
, после чего решение (2.20) принимает следующий окончательный вид:
 . (2.21)
. (2.21)
Частота собственных электрических колебаний  зависит от емкости и индуктивности по формуле (2.18), которая преобразуется
зависит от емкости и индуктивности по формуле (2.18), которая преобразуется
в формулу Томсона для периода колебаний:
 . (2.22)
. (2.22)
Вывод.В гармоническом осцилляторе колебания возникают в результате действия двух факторов: восстанавливающей силы (  или
или  или
или  ), стремящейся вернуть систему в состояние равновесия (уничтожить деформацию пружины или отклонение маятника, разрядить конденсатор), и инерции (масса, индуктивность), благодаря которой система «проскакивает» положение равновесия и отклоняется в противоположную сторону - конденсатор перезаряжается, сжатая пружина превращается в растянутую.
), стремящейся вернуть систему в состояние равновесия (уничтожить деформацию пружины или отклонение маятника, разрядить конденсатор), и инерции (масса, индуктивность), благодаря которой система «проскакивает» положение равновесия и отклоняется в противоположную сторону - конденсатор перезаряжается, сжатая пружина превращается в растянутую.
Несмотря на то, что рассмотренные колебания имеют различную физическую природу (механические, электромагнитные и т. д.), возможен единый подход к их изучению, так как они описываются одними и теми же дифференциальными уравнениями.
2.2.4. Энергия гармонического колебания. Вернемся к примеру, разобранному в п. 2.2.1. Под действием упругой силы  шарик массы совершает гармонические колебания, которые описываются уравнением (2.7): . Кинетическая энергия шарика равна:
шарик массы совершает гармонические колебания, которые описываются уравнением (2.7): . Кинетическая энергия шарика равна:
 . (2.23)
. (2.23)
Потенциальная энергия шарика  определяется работой, совершаемой упругой силой:
определяется работой, совершаемой упругой силой:
 . (2.24)
. (2.24)
Полная энергия колеблющегося шарика  с учетом (2.2)
с учетом (2.2)  равна:
равна:
 (2.25)
(2.25)
Полная энергия системы, совершающей гармонические колебания, пропорциональна квадрату амплитуды и остается постоянной во времени. Квадрат амплитуды или величину, пропорциональную  называют интенсивностью колебаний.
называют интенсивностью колебаний.
Для электрического колебательного контура справедливо уравнение (2.17). Умножим (2.17) слева на  . Получим:
. Получим:
или  .
.
Используем очевидные тождества:
Тогда:
 . (2.26)
. (2.26)
Проинтегрируем (2.26):
 (2.27)
(2.27)
В левой части (2.27) стоит сумма магнитной энергии (энергии магнитного поля катушки) и электрической энергии (энергии электрического поля конденсатора). Эта сумма постоянна.
Дата добавления: 2015-01-19; просмотров: 3103;