Измерение перемещений
В современном промышленном производстве широко применяются измерения размеров, перемещений и деформаций. Для этой цели используются измерительные преобразователи перемещений, которые по диапазону входных величин делятся на преобразователи малых перемещений (до 2-3 мм для линейных и 2-3° для угловых перемещений) и преобразователи больших перемещений (до нескольких метров для линейных и 25-40 оборотов для угловых перемещений). Роль преобразователей перемещений в промышленных измерениях велика также и потому, что при измерениях многих механических величин, таких как сила, давление, момент, сначала осуществляется их преобразование в перемещение, а затем перемещения в электрическую величину.
Для измерений перемещений находят применение различные типы измерительных преобразователей: реостатные, тензочувствительные, индуктивные, емкостные и преобразователи излучений. Выбор типа преобразователя и конкретной его разновидности определяется рядом факторов: диапазоном измеряемых перемещений, необходимой точностью измерений, допустимой продолжительностью измерений, практической возможностью использования контактного датчика той или иной конструкции, требованиями к виброустойчивости, надежности и т. п.
Большинство применяемых на практике преобразователей и приборов для измерения перемещений относится к аналоговым. Однако имеются и цифровые преобразователи - кодирующие линейки и диски. Существуют и специализированные ИИС, в состав которых входят средства измерений перемещений.
Измерение деформаций. При измерениях деформаций в качестве первичных измерительных преобразователей чаще всего используются тензорезисторы. Проволочные, фольговые и пленочные тензорезисторы применяются для измерений относительных деформаций  < от 0,005 до 2 %. Полупроводниковые тензорезисторы применяются для измерения деформаций до 0,1 %. Для измерения больших деформаций ( =5-10 %) применяются свободные проволочные тензорезисторы, закрепленные по концам базы.
< от 0,005 до 2 %. Полупроводниковые тензорезисторы применяются для измерения деформаций до 0,1 %. Для измерения больших деформаций ( =5-10 %) применяются свободные проволочные тензорезисторы, закрепленные по концам базы.
При измерении тензорезисторы обычно включаются в мостовую измерительную цепь. Напряжение питания моста ограничивается допустимой мощностью, рассеиваемой в тензорезисторе, и лежит в диапазоне 2-12 В. Небольшое рабочее относительное изменение сопротивления тензорезистора определяет и сравнительно небольшое напряжение на выходе моста. Так, выходной сигнал моста с проволочными тензорезисторами составляет не более 10-50 мВ при деформация = 1 %. Для повышения чувствительности мостовой измерительной цепи иногда применяют импульсное питание. При сохранении той же мощности, рассеиваемой в тензорезисторе, напряжение питания, а следовательно, и чувствительность моста могут быть увеличены в  раз (Q-скважность импульсов).
раз (Q-скважность импульсов).
При измерениях деформаций с помощью тензорезисторов одной из наиболее существенных погрешностей является температурная, для уменьшения которой используют дифференциальное включение тензорезисторов. В этом случае применяют два тензорезистора, наклеиваемых таким образом, чтобы деформация объекта вызывала растяжение одного тензорезистора и сжатие другого.
 |
Рисунок 16.19 - Структурная схема измерительного канала тензостанции
Тензорезисторы включаются в два соседних плеча моста. Вследствие того, что изменение температуры вызывает однонаправленные изменения сопротивлений тензорезисторов, температурную погрешность удается снизить примерно на порядок. Одновременно за счет дифференциальной схемы включения вдвое возрастает чувствительность. Наибольшее распространение получили приборы, в которых тензорезисторы включаются в неуравновешенный мост, питаемый переменным током. Ввиду малости относительных изменений сопротивлений проволочных тензорезисторов нелинейность функции преобразования неуравновешенного моста можно практически не учитывать. Для измерения деформаций широко применяются многоканальные приборы (тензостанции). Структурная схема одного канала тензостанции приведена на рисунке 16.19. Тензорезисторы R1 и R2 включены в мостовую измерительную цепь М, питаемую переменным напряжением от генератора Г. Выходной сигнал моста усиливается усилителем У, а затем демодулируется с помощью синхронного детектора Д и фильтра нижних частот Ф. Сигнал с выхода фильтра поступает на указатель Ук. Вследствие того, что мостовая измерительная цепь питается переменным током, необходимо учитывать наличие относительно больших паразитных емкостей. Так, если тензорезисторы наклеиваются на металлическую деталь, то емкость между проводящими элементами тензорезистора и деталью может составлять 10-100 пФ. В связи с этим в мосте предусмотрены элементы предварительного уравновешивания его не только по активной, но и по реактивной составляющей. Использование частотно-избирательного усилителя и синхронного детектора позволяет повысить помехоустойчивость измерительного устройства. В настоящее время в связи с развитием микроэлектроники все более перспективным становится применение мостовых цепей с питанием их постоянным током. В качестве источника питания в этих схемах используются стабилизаторы напряжения или тока, а выходное напряжение моста усиливается с помощью усилителя с высоким входным сопротивлением. Получают распространение также измерительные цепи, в которых выходной ток тензомоста уравновешивается током дополнительного источника (квазиуравновешенные мосты). Индуктивные датчики находят широкое применение в промышленности для измерений перемещений в диапазоне от десятых долей микрометра до единиц дециметров, а также для измерений других физических величин, преобразуемых в перемещение. Это объясняется существенными достоинствами индуктивных датчиков, такими как простота конструкции, надежность, высокая чувствительность, значительная мощность сигнала на выходе, защищенность от воздействий внешних электрических и магнитных полей. Разнообразие требований и условий эксплуатации датчиков перемещений определяет и множество конкретных конструкций датчиков с изменяющейся индуктивностью или взаимной индуктивностью обмоток. При этом особенно часто используются датчики дифференциального типа. Наиболее распространенной измерительной цепью при использовании дифференциальных индуктивных преобразователей является мостовая цепь, в которой два соседних плеча Z1 и Z2 образованы обмотками датчика (рисунок 16.20), а два других - элементами с сопротивлениями Z3 и Z4. На рисунке 16.20 изображен дифференциальный индуктивный датчик с подвижным сердечником. При нейтральном положении сердечника (индуктивности обеих обмоток датчика равны) мост находится в состоянии равновесия, т.е. Uвых=0. При перемещении сердечника индуктивности обмоток датчика изменяются противоположным образом, что вызывает изменение выходного напряжения. В зависимости от направления движения сердечника от нейтрального положения на 180° меняется фаза выходного переменного напряжения. Если на выходе необходимо получить постоянное напряжение, то сигнал с выхода моста подают на амплитудный детектор. При использовании синхронного, (фазочувствительного) детектора выходное постоянное напряжение меняет знак при переходе подвижного сердечника через нейтральное положение. Вследствие развития микроэлектроники все более перспективным становится преобразование выходного параметра индуктивного датчика в частотно-временные параметры сигналов: частоту, период, длительность импульсов, скважность.
|

исунок 16.20 - Схема включения дифференциального индуктивного датчика
В качестве примера на рисунке 16.21а приведена упрощенная схема преобразователя индуктивности датчика в период повторения импульсов, реализующая метод развертывающего преобразования. Работа схемы иллюстрируется с помощью временных диаграмм (рисунок 16.21б).
Операционный усилитель А с большим коэффициентом усиления выполняет функции схемы сравнения и находится в состоянии насыщения. Значение напряжения на его выходе uвых (t) по модулю равно значению напряжения насыщения Е и может изменять знак в зависимости от соотношения напряжений на входах усилителя. Напряжение u2 (t) на неинвертирующем входе усилителя снимается с делителя, выполненного на резисторах R2, R3, а его значение равно u2=kE, где k=R3/(R2+R3). Напряжение u1(t) на инвертирующем входе усилителя является выходным напряжением пассивной интегрирующей цепочки, образованной катушкой индуктивности L и резистором R1. Напряжение u1(t) изменяется по экспоненте с постоянной времени L/R1, стремясь к значению напряжения насыщения Е. В момент времени Т/2, когда u1 (Т/2)=u2, схема сравнения переходит в противоположное состояние, т. е. напряжение uвых меняет знак. Далее процесс циклически повторяется. Выходное напряжение представляет собой периодическую последовательность двухполярных прямоугольных импульсов (типа «меандр»), период повторения которых можно записать в виде равенства (16.21)
Т = 2 (L/R1) ln [(1+k) / (l-k)], (16.21)
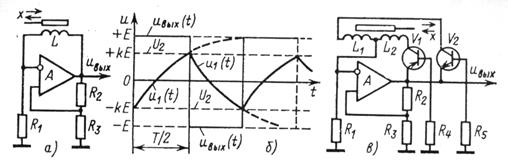
а - принципиальная электрическая схема; б - временные диаграммы;
в - принципиальная электрическая схема преобразователя с дифференциальным датчиком
Рисунок 16.21 - Преобразователи перемещений в период повторения импульсов.
Отсюда видно, что период повторения импульсов пропорционален индуктивности обмотки датчика перемещений. На рисунке 16.21в показана схема, в которой используется дифференциальный индуктивный датчик перемещений.
Данная схема аналогична описанной выше, но обмотки L1 и L2 подключены к выходу операционного усилителя через электронные ключи на транзисторах V1 и V2. Транзисторы имеют различный характер проводимости, поэтому при uвых= +E транзистор V1 открыт, а V2 закрыт, а при uвых= -E наоборот, V1 закрыт, а V2 открыт. Таким образом обеспечивается поочередное подключение обмоток L1 и L2.Если индуктивности этих обмоток не равны, то будут отличаться длительности положительных и отрицательных генерируемых импульсов, т. е. будет изменяться скважность. Выходная величина преобразователя будет вычисляться по формуле (16.22)
у = (Т1 – Т2)/( Т1 + Т2) = (L1 – L2)/( L1 + L2), (16.22)
где L1 и L2 - длительности положительных и отрицательных импульсов.
Очевидно, что при одинаковой амплитуде положительных и отрицательных импульсов величина у пропорциональна постоянной составляющей выходного сигнала, следовательно, постоянная составляющая выходного сигнала также может рассматриваться в качестве выходной величины. Достоинством датчиков перемещений с частотной гармонической или импульсной модуляцией является возможность передачи выходных сигналов по линиям связи на большие расстояния практически без потерь информации и удобство их преобразования в цифровой код.
При использовании трансформаторных датчиков перемещений выходной величиной является амплитуда переменного напряжения, снимаемого с измерительной обмотки. В дальнейшем это напряжение служит для получения результата измерения либо непосредственно, либо после предварительного преобразования в постоянное напряжение или постоянный ток.
Оптоэлектрические преобразователи. Высокую точность измерений перемещений позволяют получить методы, основанные на применении оптоэлектрических преобразователей и источников оптического излучения, например методы растра и муара.
В методе растра используются две плоские пластины с параллельными штрихами. Расстояние между штрихами на каждой пластине постоянно, но для двух пластин незначительно отличается. При наложении пластин (растров) друг на друга и их просвечивании наблюдаются зоны сгущения и разряжения штрихов (рисунок 16.22а, 16.22б). Перемещение одного растра относительно другого в направлении, перпендикулярном штрихам, вызывает перемещение указанных зон сгущения штрихов в том же направлении, но значение этого перемещения у оказывается гораздо больше, чем значение измеряемого перемещения х, т. е. происходит оптическая редукция. Если расстояния между штрихами на пластинах равны а и b (рисунок 16.22а, 16.22б), то перемещение у будет вычисляться по формуле (16.23)
 , (16.23)
, (16.23)
В методе муара растры на двух пластинах имеют одинаковый шаг, но расположены под небольшим углом α. друг к другу (рисунок 16.22б, 16.22г). При наложении растров и их просвечивании наблюдаются светлые и темные полосы, идущие поперек штрихов и называемые комбинационными, или муаровыми, полосами. Перемещение одного из растров вызывает значительно большее смещение муаровых полос в направлении, перпендикулярном направлению движения растра, т. е. также происходит оптическая редукция. Значения этих перемещений связаны соотношением (16.24)
у = x/sin α, (16.24)
Наличие оптической редукции в методах растра и муара позволяет достигнуть высокой чувствительности к измеряемому перемещению.
При измерениях перемещений от долей микрометра до метра используются лазерные интерферометры. В этих приборах производится сложение двух световых потоков, излучаемых лазером, один из которых проходит постоянный путь, а второй - путь, зависящий от измеряемого расстояния. Сложение потоков приводит к усилению или ослаблению суммарного потока в зависимости от разности фаз потоков, т. е. в зависимости от измеряемого расстояния.
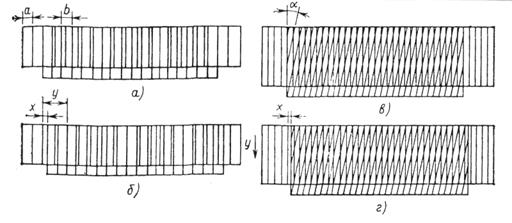
Рисунок 16.22 - Растровый и муаровый преобразователи перемещений
На рисунке 16.23 показано устройство лазерного интерферометра. Лазер излучает световой поток Ф, который разделяется на два потока (Ф1 и Ф2) с помощью полупрозрачного наклонного зеркала 2. Поток (Ф1, отражаясь от зеркала 2, а затем от зеркала 3, попадает на фотоэлемент 1. Поток Ф2 проходит через зеркало 2, отражается от объекта 4, затем от зеркала 2 и попадает на фотоэлемент 1. В фотоэлементе 1 потоки складываются, и при изменении расстояния до объекта 4 периодически будет изменяться сигнал (фототок) фотоэлемента. Число подсчитанных с помощью счетчика 5 периодов k фототока и перемещение объекта на расстояние х связаны соотношением (16.25)
х = k  /2, (16.25)
/2, (16.25)
где - длина волны света.
При измерении перемещений до 1 м погрешность составляет 0,1-1 мкм. Для измерения больших расстояний (сотен метров и более) применяются лазерные дальномеры, работающие в импульсном или непрерывном режиме. В первом случае измеряется интервал времени между излученным и отраженным импульсами, во втором - сдвиг фаз между излученным и отраженным сигналами.
| |
Рисунок 16.23 - Лазерный интерферометр
Измерение уровней.
При учете количества жидких или сыпучих материалов часто возникает необходимость измерения их уровня в резервуарах, причем под уровнем понимается расстояние от верхней поверхности контролируемого вещества до любой произвольно выбранной отметки выше или ниже этой поверхности. Разнообразие конструкций существующих уровнемеров объясняется широким диапазоном размеров резервуаров, различиями в условиях эксплуатации и физико-химических свойств измеряемых веществ. Поэтому рассмотрим лишь некоторые наиболее распространенные способы измерения уровней. При измерениях уровней жидкости широко применяются поплавковые преобразователи, содержащие поплавок, плавающий на поверхности жидкости. Обычно поплавок с помощью штока связан с подвижным элементом реостатного или индуктивного преобразователя перемещений. Широкое распространение при измерениях уровней получили также емкостные преобразователи, так как в них достигается практически линейное изменение емкости в большом диапазоне изменения уровня жидкости. На рисунке 16.24 приведена схема прибора для измерения уровня с емкостным датчиком. Емкостный датчик опущен в резервуар и состоит из двух цилиндрических электродов. Емкость датчика линейно связана с измеряемым уровнем жидкости х. Емкостный датчик включен в измерительную цепь, представляющую собой уравновешенный мост. Если емкость Сп конденсатора переменной емкости линейно зависит от угла поворота вала реверсивного двигателя РД, то этот угол поворота будет линейной функцией измеряемого уровня х. При повороте вала РД одновременно перемещается указатель отчетного устройства ОтУ. Существенным недостатком данной схемы является зависимость результата измерений от диэлектрической проницаемости среды.
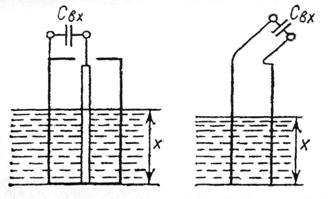
При измерениях уровней как в диэлектрических, так и в проводящих средах находят применение преобразователи, использующие зависимость резонансной частоты длинной линии от степени заполнения ее контролируемой средой (резонансные электромагнитные системы). Обычно такие датчики представляют собой симметричную двухпроводную или коаксиальную линию, включаемую в контур автогенератора. Погружение датчика в контролируемую жидкость вызывает изменение частоты генерации. Действительно, погружение
Рисунок 16.24 - Схема прибора для измерения уровня жидкости
датчика в диэлектрическую жидкость с относительной диэлектрической проницаемостью е приводит к уменьшению его волнового сопротивления, а также к уменьшению фазовой скорости электромагнитных волн в  раз. Погружение датчика в проводящую среду приводит к возрастанию резонансной частоты из-за уменьшения участка датчика, по которому протекают высокочастотные токи (проводящая жидкость играет роль замыкающей перемычки). Принцип действия указанных датчиков уровня иллюстрируется на рисунке 16.25 (на рисунке 16.25а - жидкость диэлектрическая, на рисунке 16.25б - жидкость проводящая). К недостаткам резонансных электромагнитных датчиков Уровня следует отнести зависимость их выходной величины от диэлектрической проницаемости жидкости или от удельного сопротивления проводящей жидкости.
раз. Погружение датчика в проводящую среду приводит к возрастанию резонансной частоты из-за уменьшения участка датчика, по которому протекают высокочастотные токи (проводящая жидкость играет роль замыкающей перемычки). Принцип действия указанных датчиков уровня иллюстрируется на рисунке 16.25 (на рисунке 16.25а - жидкость диэлектрическая, на рисунке 16.25б - жидкость проводящая). К недостаткам резонансных электромагнитных датчиков Уровня следует отнести зависимость их выходной величины от диэлектрической проницаемости жидкости или от удельного сопротивления проводящей жидкости.
Повышение точности измерений перемещений. Широкое применение в промышленности датчиков перемещений для измерений разнообразных физических величин делает очень важной задачу повышения точности измерений перемещений. С одной стороны, указанная задача решается путем совершенствования конструкций и технологии изготовления датчиков перемещений, применения лучших схем преобразования сигналов на базе современной микроэлектроники, а также путем создания новых типов датчиков, использующих различные физические явления.
С другой стороны, для достижения высоких точностей измерений все более перспективным становится использование для повышения точности измерений структурной и временной избыточности.
а) б)
Рисунок 16.25 - Резонансные электромагнитные преобразователи уровня
В качестве примера рассмотрим применение тестовых методов для повышения точности измерений перемещений. На рисунке 16.26 приведена структурная схема одного канала тестовой ИИС с индуктивными датчиками перемещений. Датчик перемещений представляет собой дифференциальный индуктивный датчик соленоидного типа с подвижным ферромагнитным сердечником. Выводы катушек 1-3 и 5-7 образуют основной (исходный) ЭП Vвых дифференциальный датчик. Выводы 2-4 и 6-8 смещены относительно выводов основного датчика на одну и ту же величину  . При однородной по длине датчика намотке выводы 2-4 и 6-8 образуют как бы другой (дополнительный) дифференциальный датчик, смещенный относительно основного на величину . Обмотки датчика с помощью коммутатора К подключаются к измерительному преобразователю МП, выходной сигнал которого передается в линию связи ЛС. В качестве ИП может быть использован, например, преобразователь индуктивности в период, изображенный на рисунке 16.26. Аналого-цифровой преобразователь АЦП преобразует сигнал в цифровой код N, который вводится в вычислительное устройство ВУ. Предположим, что функция преобразования перемещения сердечника в индуктивность любой обмотки датчика описывается алгебраическим полиномом второго порядка. Тогда для индуктивностей обмоток, имеющих выводы 1-3, 5-7, 2-4 и 6-8, можно записать выражения (16.26)
. При однородной по длине датчика намотке выводы 2-4 и 6-8 образуют как бы другой (дополнительный) дифференциальный датчик, смещенный относительно основного на величину . Обмотки датчика с помощью коммутатора К подключаются к измерительному преобразователю МП, выходной сигнал которого передается в линию связи ЛС. В качестве ИП может быть использован, например, преобразователь индуктивности в период, изображенный на рисунке 16.26. Аналого-цифровой преобразователь АЦП преобразует сигнал в цифровой код N, который вводится в вычислительное устройство ВУ. Предположим, что функция преобразования перемещения сердечника в индуктивность любой обмотки датчика описывается алгебраическим полиномом второго порядка. Тогда для индуктивностей обмоток, имеющих выводы 1-3, 5-7, 2-4 и 6-8, можно записать выражения (16.26)
L1-3=d0+d1(x0+x) + d2(x0+x)2
L5-7=d0+d1(x0-x) + d2(x0-x)2
L2-4=d0+d1(x0+x+ )+d2(x0+x+ )2 , (16.26)
L5-7=d0+d1(x0-x- ) + d2(x0-x- )2
где x0 - нейтральное положение сердечника, при котором L1-3= L5-7;
х - измеряемое перемещение, отсчитываемое относительно нейтрального положения сердечника;
d0, d1, d2-параметры функции преобразования датчика.
Рисунок 16.26 - Структурная схема канала тестовой ИИС для измерения перемещений
В этом случае выполняются четыре преобразования путем поочередного подключения к ИП выводов 1-5, 5-7, 2-4 и 6-8. Предположим, что ИП имеет линейную функцию преобразования. Пренебрегая погрешностями квантования и нелинейности АЦП, будем считать, что его функция преобразования также линейна. Тогда можно записать (16.27)
Nj =c0 + с1Lj , (16.27)
где Nj - код на выходе АЦП;
Lj - индуктивность j-й обмотки датчика;
c0 , с1 - параметры функции преобразования индуктивности в код.
Результаты четырех преобразований при поочередном подключении обмоток датчика запишем в виде (16.28)
L1-3= с0+ с1d0+ с1d1(x0+x) + с1d2(x0+x)2
L5-7= с0 +с1d0+ с1d1(x0-x) + с1d2(x0-x)
L2-4= с0 +с1d0+ с1d1(x0+x+ ) + с1d2(x0+x+ )2 (16.28)
L5-7= с0 +с1d0+ с1d1(x0-x- ) + с1d2(x0-x- )2
Решив систему уравнений (16.28), получим (16.29)
x = (N1- N2)/[( N3- N4) - ( N1- N2)], (16.29)
Вычисление значения измеряемого перемещения по (16.29) осуществляется в ВУ. Можно показать, что вычисленное значение перемещения х не зависит от параметров с0 с1 d0 d1 d2 датчика перемещений и всего измерительного канала, а достижимая точность определяется идентичностью двух половин дифференциального датчика и стабильностью значения (16.29).
Другим примером использования структурной избыточности и соответствующих алгоритмов обработки измерительной информации с целью повышения точности измерений является применение двухканальных преобразователей уровня жидкости. Как отмечалось выше, выходная величина резонансных электромагнитных датчиков уровня зависит от диэлектрической проницаемости контролируемой жидкости. В общем случае функция преобразования таких датчиков может быть представлена в виде (16.30)
(ω/ωо)2 = 1+ (ε-1) f(x), (16.30)
где ω - частота генерации (выходной параметр);
ε - диэлектрическая проницаемость жидкости;
ωо - постоянная величина;
f(x) - функция измеряемого уровня x, зависящая от конструкции конкретного датчика.
Для повышения точности измерений используются два аналогичных датчика, имеющих разные функции f(x). Отличие функций f(x) может быть реализовано включение различных нагрузок на концах отрезков линий, образующих датчики; например, один отрезок короткозамкнут, другой разомкнут.
В этом случае выходные параметры обоих датчиков будут определяться уравнениями (16.31) и (16.32)
(ω1/ωо1)2 = 1+ (ε-1) f1(x), (16.31)
(ω2/ωо2)2 = 1+ (ε-1) f2(x), (16.32)
Значения выходных параметров датчиков преобразуем в соответствии с формулой (16.33)
y= [(ω1/ωо1)2-1]/[(ω2/ωо2)2-1]= f1(x) / f1(x)=F(x), (16.33)
Очевидно, что вычисленное по (16.33) значение у является функцией измеряемого уровня х и не зависит от значения диэлектрической проницаемости ε.
Таким образом, рассмотренные выше методы позволяют обеспечить высокую точность измерений различных физических величин в изменяющихся условиях эксплуатации при использовании относительно неточных, но простых и надежных измерительных преобразователей.
Дата добавления: 2015-01-13; просмотров: 6165;