Комплексная система автоматизации управления сортировочной станцией
Разработана (и в настоящее время внедряется) комплексная система автоматизации управления сортировочной станцией КСАУ CC, ее особенностью является объединение уровней планирования и управления в единое целое на основе общей информационной базы. Это позволит создать единую базу данных для всех служб участвующих в технологическом процессе работы станции и автоматизировать работу не только горки, но и всей станции.
Создание КСАУ CC позволит повысить безопасность работы станции, за счет исключения случаев проезда запрещающих сигналов средствами ГАЛС P, автоматизировать управление надвигом и роспуском составов, ввести контроль за обработкой состава, исключить опасный труд сигналистов по закреплению составов и регулировщиков скорости по вытормажи-ванию отцепов. Компонентами системы КСАУ CC являются:
- подсистема горочной автоматической централизации на микропроцес
сорах (ГАЦ MH);
- подсистема горочного программно- задающего устройства (ГПЗУ);
- подсистема устройства управления прицельным торможением (УУПТ);
256
- подсистема горочнои автоматической локомотивной сигнализации по
радиоканалу (ГАЛС P);
- подсистема автоматизации управления компрессорной станции (КСАУ КС);
- подсистема контроля и диагностики станционных устройств (КДК СУ ГАЦ).
Горочное программно-задающее устройство ГПЗУ должно осуществлять
контроль правильности расцепки вагонов, управлять указателями количества вагонов (для расценщиков перед горбом горки), выполнять автоматическую коррекцию ввода маршрутов в ГАЦ. Для решения этих задач в АРМ ДСПГ системы ГПЗУ вводится информация о подходе поездов в парке прибытия и их готовности к расформированию, предусмотрена возможность для корректировки сортировочного листка, ведения накопления вагонов в сортировочном парке и выбора оптимального варианта очередности роспуска составов. Подсистема ГПЗУ рассчитывает для ГАЛС P значения скорости роспуска, организует ввод программы роспуска в ГАЦ MH, управляет показаниями горочного светофора по пути надвига и указателями количества вагонов.
Система ГАЦ MH (вместо устаревшей системы ГАЦ) осуществляет управление маршрутами движения отцепов в процессе роспуска, корректирует программу роспуска с точностью до вагона, контролирует накопление вагонов в сортировочном парке и маневры между роспусками. Подсистема ГАЦ MH во взаимодействии с ГАЛС P позволяет безопасно вести роспуск и маневры.
Для этого перед каждым стрелочным участком устанавливается путевой датчик ПД (устройство счета осей УСО), который позволяет определять маршрут очередного отцепа, количество вагонов в нем, распознавать направление движения при маневрах, предотвращая взрез стрелок. Информация об отцепах поступает в ГАЦ MH из сортировочного листка и расшифровывается по инвентарному номеру входящих в отцеп вагонов. Информация о вагонах учитывает характеристику вагонов, особые признаки и геометрические размеры.
Устройство управления прицельным торможением УУПТ. Для реализации всех этапов работы УУПТ применяют внедряемые в настоящее время новые типы замедлителей ВЗПГ (см. рис. 5.17) и КЗ (см. рис 5.16) для горочных позиций и PH3-2M для парковых позиций, новые типы скоростемеров и весомеров, новые системы контроля заполнения путей КЗП. Это создает условия для повышения качества и точности вытормаживания отцепов, контроля заполнения путей сортировочного парка. Новые замедлители приведены на рис. 5.20 и 5.21.
Индуктивно-проводной датчик ИПД обеспечивает контроль занятости предстрелочного участка. Он применяется на последней стрелке сортировочного пучка. Аналогичный датчик применяется и в системах контроля занятости путей КЗП.
Горочная автоматическая локомотивная сигнализация ГАЛС P с передачей информации по радиоканалу и телеуправлением локомотивов. Одновременно с роспуском информация об отцепах и вагонах в отцепах вводится в ГАЦ MH и синхронно с роспуском, вводится информация в ГАЛС P о

скорости движения, параметрах состава, его отцепах. Система ГАЛС Ρ обеспечивает радиоуправление маневровыми локомотивами и имеет расширенную зону управления, включающую не только пути и горловины парка прибытия, но и других парков станции.
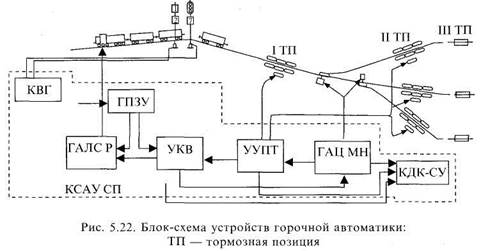
Подсистема горочной автоматической локомотивной сигнализации (ГАЛС Р) реализует скоростные режимы надвига, роспуска и осаживания вагонов с обеспечением безопасности этих операций, контролирует местоположение горочных локомотивов в предгорочном парке, а также осуществляет контроль за перемещением маневровых локомотивов, работающих на станции. Связь между подсистемами комплексной системы автоматизации управления сортировочной станцией (КСАУ СС) показана на рис. 5.22.
Подсистема КСАУ КС обеспечивает управление компрессорами в автоматическом режиме, контролирует рабочие параметры компрессоров, давление сжатого воздуха в пневмосети.
Подсистема КДК СУ ГАЦ обеспечивает постоянный контроль состояния и параметров горочных устройств, для их обработки, отображения и хранения, обеспечивает контроль и диагностику устройств горочной автоматической централизации.
Кроме того, система КСАУ СС включает в себя автоматизированные рабочие места (АРМ) оперативного и обслуживающего персонала.
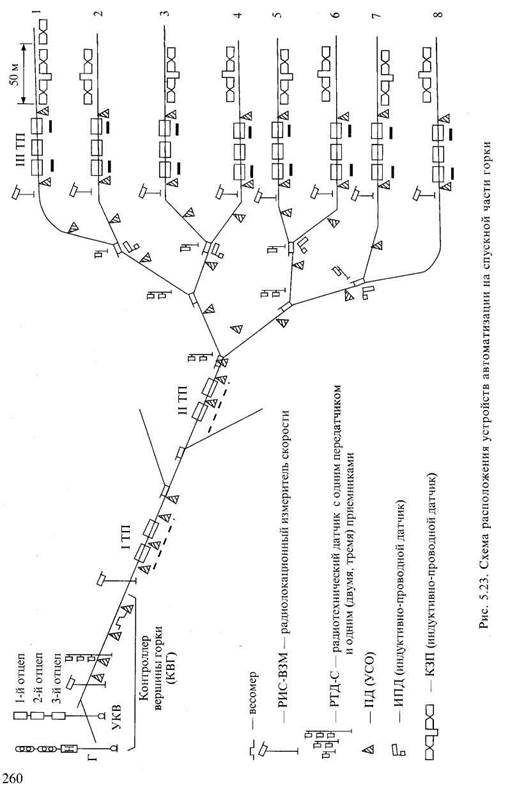
На спускной части горки устанавливают устройства контроля головной зоны КВГ, которые размещены на двух контрольных точках. На первой контрольной точке, в зоне отрыва отцепа устанавливаются путевой датчик
(счетчик осей УСО), радиотехнический датчик с одним передатчиком и тремя приемниками РТД-С для фиксации отрыва отцепа, радиолокационные измерители скорости РИС-ВЗМ для определения скорости надвига и скатывания, указатель количества вагонов УКВ.
На второй контрольной точке устанавливаются счетчики осей УСО и весомер для поосного взвешивания осей. Информация с путевых датчиков, РТД-С, РИС-ВЗМ поступает в КВГ и обрабатывается.
Указатель количества вагонов УКВ получает от КВГ информацию для отображения на индикаторах количества вагонов в трех очередных отцепах.
Перед вершиной горки, в головной зоне и на каждой тормозной позиции устанавливают радиолокационные измерители скорости РИС-ВЗМ для фиксации и регистрации фактической скорости. В автоматическом режиме сравниваются значения фактической и расчетной скоростей, и определяется интенсивность и время торможения отцепов замедлителями. Размещение устройств автоматизации на спускной части горки показано на рис. 5.23.
Контроль заполнения путей (КЗП). В зоне КЗП размещаются линейный пункт (на 24 пути в сортировочном парке) и индуктивно-проводные датчики КЗП (18 датчиков на один путь, 450 м).
5.11. Проектирование сортировочных станций 5.11.1. Общие понятия
Сортировочные станции проектируются с выполнением основных норм, правил и требованиям к проектам станций.
При переустройстве станций изучают объем работы станции, ее схему, имеющиеся устройства на станции, организацию маневровой работы, все передвижения по станции, недостатки и узкие места в схеме станции. Изучается роль станции на сети. Подбираются необходимые данные: план станции и профиль пути, размеры выполняемой работы на момент проектиро-
|
вания и на перспективу, выполняются необходимые инженерно-геологические и инженерно-геодезические работы.
При строительстве новой станции дополнительно подбирают карты местности в районах возможного ее размещения.
Сортировочные станции при проектировании никогда не рассматриваются изолированно, а во взаимодействии с сортировочными станциями данного полигона или всей сети.
Для крупных станций разрабатывают генеральную схему развития станции (или узла) и выбирают оптимальное решение на основе сравнения различных вариантов с учетом потребной пропускной и перерабатывающей способности. На основе генеральной схемы разрабатывается проект развития станции (или сооружения новой), включающий весь комплекс устройств, с выделением очередности работ и составлением проекта организации строительства и сметы для первой очереди
На основании принятого распределения работы между сортировочными станциями в данном полигоне сети составляют план формирования поездов и устанавливают, какие вагонопотоки пойдут без переработки в сквозных поездах и отправительских маршрутах, а какие с переработкой.
Дата добавления: 2014-12-24; просмотров: 1661;