Тяговые электродвигатели
Существенными факторами, учитываемыми при выборе тяговых электродвигателей для электромобилей, являются:
- высокий к.п.д.;
- соответствие механической характеристики, т.е. зависимости момента от частоты вращения, условиям электрической тяги (снижение момента по мере повышения частоты вращения);
- минимальное обслуживание в эксплуатации;
- нечувствительность к перегрузкам по току (в 2,5-3 раза) и загрязнению корпуса;
- стоимость.
На электромобилях применялись и применяются (табл. 6.1-6.4) электродвигатели переменного тока − тяговые асинхронные двигатели (ТАД), тяговые электродвигатели постоянного тока со щеточно-коллекторным устройством (ТЭД) и бесщёточные тяговые синхронные двигатели (ТСД), работающие по схеме вспомогательного двигателя и имеющие выходные характеристики ТЭД.
Таблица 6.1
Сравнительные параметры различных типов тяговых электродвигателей
| Тип электродвигателя | Масса, кг | Средний к.п.д., % | Относит. стоимость |
| Коллекторный постоянного тока | 1,00 | ||
| Асинхронный | 92,5 | 0,26 | |
| Синхронный с обм. возбуждения | 0,52 | ||
| Синхронный с пост. магнитами | 0,80 | ||
| Дисковый синхр. с пост. магнитами | 0,45 |
Таблица 6.2
Сравнительные технические данные основных типов тяговых
электроприводов электромобилей
| Тип двигателя | Коллект. пост. тока | Синхр. с обм. возбуждения | Синхр. с пост. магнитами | Асинхрон-ный | ||
| Макс. мощн., кВт | ||||||
| Напр. тяг. ист., В | ||||||
| Макс. потр. ток, А | ПО | |||||
| Ск-сть эл-дв., мин-1: | ||||||
| номинальная | ||||||
| максимальная | ||||||
| Перегр. сп-сть (ММ/МН) | 2,0 | 2,5 | 1,5 | 3,0 | ||
| Способ охлажд. эл. двиг. | Возд. принуд. | Возд принуд. | Жидкостное | Жидкост-ное | ||
| КПД в ном. режиме | 0,84 | 0,87 | 0,94 | 0,92 | ||
| Ресурс, тыс. км | Нет данных | |||||
| Масса, кг: | ||||||
| электродвигатель | ||||||
| преобразователь | ||||||
| всего | ||||||
| Стоимость, долл. США: | ||||||
| электродвигатель | ||||||
| преобразователь | ||||||
| всего | ||||||
Таблица 6.3
Сравнительная стоимость электропривода от объёма выпуска
| Выпуск, шт. в год | Стоимость тягового электропривода, долл. | |||||
| коллекторный | асинхронный | вентильный | ||||
| 25 кВт | 40 кВт | 20 кВт | 40 кВт | 25 кВт | 40 кВт | |
| до 10 | ||||||
Таблица 6.4
Сравнительные показатели типов электроприводов Р = 12 кВт
| Параметры | Тип электропривода | ||||
| коллектор. | асинхрон. | вентильный | |||
| Макс, мощн., кВт по циклу НАМИ-2 | |||||
| Напр, тягового энергоисточника, В | |||||
| Макс, ток от тягового источника, А | |||||
| Ск-сть вращ. тяг. эл-двиг, мин-1: | |||||
| номинальная | |||||
| максимальная | |||||
| Охлаждение электродвигателя | самовентил. | жидкост. | жидкост. | ||
| Перегруз, способность (Ммакс/Ммин) | 2,4 | 1,7 | 2,1 | ||
| К.п.д. эл-привода в номинальном режиме | 0,85 | 0,9 | 0,94 | ||
| Ресурс до первого ремонта, тыс. ч | |||||
| Масса электродвигателя, кг | 13,6 | ||||
| Масса преобразователя, кг | |||||
| Масса электропривода, кг | 35,6 | ||||
| *Стоим-сть электродвигателя, долл. | |||||
| *Стоим-сть преобразователя, долл. | |||||
| *Стоим-сть электропривода, долл. | |||||
*Для выпуска 1000 шт. в год
Рассмотрим особенности электродвигателей перечисленных типов.
Применяются трехфазные ТАД, имеющие обмотку ротора типа «беличья клетка», состоящую из медных или алюминиевых шин, размещенных в пазах шихтованной стали ротора. Шины замыкаются накоротко с каждой стороны пакета медным или алюминиевым кольцом.
Питание обмотки статора осуществляется от трехфазного источника с регулируемой частотой. Система трёхфазного тока создает вращающееся магнитное поле, которое обусловливает появление тока в короткозамкнутой обмотке ротора. Взаимодействие между током ротора и вращающимся магнитным полем статора создаёт вращающий момент на валу ТАД. Частота вращения магнитного поля статора определяется частотой напряжения источника, питающего ТАД, и числом пар полюсов обмотки статора. Частота вращения ротора всегда на несколько процентов ниже частоты вращения магнитного потока поля, поскольку в случае выравнивания частот вращения поля статора и вала ротора момент на валу уменьшается до нуля. Благодаря использованию короткозамкнутого ротора объём работы по обслуживанию ТАД является минимальным. Специальные уплотнения предупреждают попадание влаги и дорожной грязи внутрь корпуса ТАД. К.п.д. меняется в зависимости от частоту вращения. Например, ТАД мощностью 7 кВт имеет к.п.д. 91 % при 6000 мин-1 и 82% при 1500 мин-1. Максимальная частота вращения этого ТАД составляет около 15000 мин-1. Вращающий момент можно регулировать посредством переключения обмотки статора. Обмотка соединена в треугольник, когда электромобиль движется с высокой скоростью по магистрали. Обмотка переключается на звезду, когда требуется большой момент при движении на подъёме или при разгоне. Экономический эффект от переключения обмотки статора аналогичен переключению ступеней коробки передач с высшей на низшую.
Использование на. электромобилях серийных ТЭД объясняется их весьма благоприятными механическими характеристиками. Частота вращения ТЭД пропорциональна питающему напряжению, что упрощает систему управления ТЭД. К.п.д. у ТЭД ниже, чем у ТАД, а конструкция ТЭД является более сложной из-за наличия щёточно-коллекторного узла. Поэтому необходимо периодическое обслуживание ТЭД. Наличие коллектора ограничивает уровень быстроходности и допустимые перегрузки. Допустимая максимальная частота вращения меньше, чем у ТАД аналогичной мощности. Использование ТЭД на электромобилях иногда делает целесообразным применение многоступенчатой механической передачи (коробки передач).
Статор ТЭД имеет полюса с обмотками возбуждения. В простейшем случае секции якоря соединены последовательно, причем конец каждой секции подсоединен к коллекторной пластине. Обмотки возбуждения питаются постоянным током. Взаимодействие магнитных полей обмоток возбуждения и якоря создает момент на валу ТЭД. Для осуществления постоянного вращения коллектор изменяет направление тока в секции, когда она проходит через нейтральную зону. Большинство ТЭД имеет вспомогательные полюса, расположенные непосредственно под щеткодержателями. По обмоткам вспомогательных полюсов протекает ток якоря. Поток вспомогательных полюсов компенсирует реакцию якоря, что уменьшает искажение основного потока и тем самым улучшает процесс коммутации.
Наиболее подходящим для электрической тяги является сериесный ТЭД, у которого обмотки возбуждения имеют весьма малое сопротивление и соединены последовательно с обмоткой якоря. Этот ТЭД имеет большой пусковой момент, который снижается с возрастанием частоты вращения ТЭД. Эта характеристика вполне приемлема для городского движения, но может создать определённые проблемы при движении на шоссе. Изменение полосы движения может потребовать ускоренного движения на коротком участке, но сериесный ТЭД имеет небольшой момент на высокой скорости. На некоторых электромобилях применяются компаундные ТЭД с сериесной и независимой обмоткой возбуждения, способные развивать больший момент при высокой частоте вращения.
К.п.д. сериесных ТЭД может быть повышен при замене обычных полюсов с обмотками возбуждения полюсами на постоянных магнитах. Дорогостоящие редкоземельные постоянные магниты создают больший магнитный поток, чем полюса с обмотками возбуждения. Это позволяет уменьшить размеры ТЭД и повысить его к.п.д.
Бесщеточный привод основан на использовании высокочастотных бесколлекторных двигателей. Ниже рассмотрена одна из возможных модификаций такого ТЭД. Он включает вращающиеся постоянные магниты и обычно три или четыре обмотки, установленные на статоре.
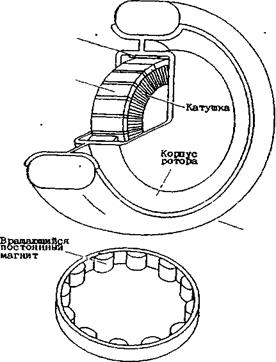
|
| Вращавшийся постоянный магнит |
| Неподвижный стальной сердечник |
| Шина |
Рис. 6.1. Схема устройства тягового синхронного двигателя,
смонтированного в колесе
Каждая обмотка статора питается через полупроводниковый переключатель, осуществляющий подачу напряжения на обмотку в определенной последовательности. В любой момент времени под напряжением находится только одна из обмоток статора. Вращение возникает благодаря силе, обусловленной взаимодействием поля постоянного магнита и полем обмотки статора, находящейся в данный момент под напряжением.
Например, когда под напряжением находится обмотка, вращающий момент обусловлен отталкивающей силой, действующей между полем обмотки и постоянным магнитом, расположенным на роторе. Эта сила стремится выровнять поля возбужденной обмотки и постоянного магнита. Выравнивание этих полей прекратило бы вращение. Чтобы избежать этого, для поддержания вращающей силы ещё до выравнивания полей возбуждаются следующие обмотки. Положение ротора определяется набегающей обмоткой. Момент времени переключения определяется положением ротора. Полупроводниковый переключатель возбуждает обмотки статора в такой последовательности, чтобы обеспечить постоянное вращение. Чёткое синхронное переключение обмоток требует сложных электронных цепей, чтобы точно установить положение ротора и приводить в действие переключатель в соответствующие моменты времени. Главным преимуществом этого ТСД является устранение щеток и коммутационного искрения. Бесщёточные ТСД имеют более высокий к.п.д. и надёжность, чем ТЭД.
Тяговые свойства этих приводов особенно хороши при вращении ТСД с постоянной высокой частотой. Большинство гоночных электромобилей имеют бессточные ТСД и соответствующие системы привода. Большинство ТСД связаны с колесом через постоянное передаточное число. Интересным экспериментом является непосредственное соединение колеса с валом ТСД. На рисунке 6.1 как раз и приведено разработанное в Японии мотор-колесо со встроенным бесщеточным ТСД рассмотренного типа. Ведущее колесо с шиной конструктивно объединено с кольцом, на котором установлены постоянные магниты типа самарий-кобальт. Обмотки статора, установлены на неподвижном ободе, который монтируется на корпусе электромобиля. Для привода экспериментального электромобиля используются четыре мотор-колеса. Система управления четырьмя ТСД является сравнительно сложной задачей.
Дата добавления: 2014-12-24; просмотров: 2686;