Сегмент пользователей
Сегмент пользователей состоит из антенн и приемников-процессоров, которые осуществляют прием сигналов и навигационные расчеты для получения информации о местоположении и точном времени.В июне 1999года Европейским сообществом принято решение о создании глобальнойнавигационной спутниковой системы “ Galileo”.Космический сегмент системы будет состоять из 32 спутников, три из которых являются резервными. Спутники будут располагаться на трех орбитах высотой порядка 23600 км, с наклоном к экватору около 550. Кроме среднеорбитальных спутников предполагается запустить девять геостационарных спутников. Система разрабатывается в интересах гражданских пользователей, она дополнит GNSS, и будет иметь ряд отличий и преимуществ по сравнению с GPS.
Проектируемая точность определения МС в горизонтальной плоскости не более 10 м, в вертикальной плоскости не более 4 м (при гарантированной вероятности 95%). С учетом локальных дополнений точность определения местоположения планируется не хуже 0,5 м.
3.8.3. Принципы функционирования СНС. [ 4,5,6 ]
В основу определения позиции ВС (любого потребителя GPS) положен принцип измерения дальностей до навигационных спутников. Если в любой момент времени известны координаты спутников в околоземном пространстве, то могут быть измерены первичные навигационные параметры - дальности до спутников, видимых из точки наблюдения. Измеренная дальность D1 до одного спутника определяет поверхность положения ВС в виде сферы с радиусом, равным измеренной дальности (рис.53).
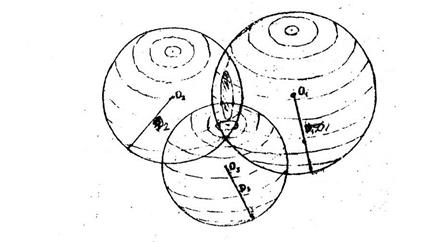
Рис. 53. Поверхности положения НИСЗ
Дальности до двух спутников определяют две поверхности положения, пересечения которых дает линию положения в виде окружности. Поверхность положения, полученная с помощью третьего спутника, может иметь пересечение с линией положения, полученной от первых двух спутников, только в двух точках. Таким образом, имея информацию о дальностях до трех спутников, возможное положение ВС можно ограничить двумя возможными точками. Методом логического исключения можно определить, какая из двух точек является истинной позицией ВС. В бортовой аппаратурепотребителей заложены специальные алгоритмы, позволяющие отличать правильную позицию ВС от ложной.В СНС реализуется псевдодальномерный метод определения дальности до спутников, что требует высокоточной синхронизации бортовых и спутниковых эталонов времени. А это требует пеленгования минимум трех-четырех спутников одновременно.
Дата добавления: 2019-07-26; просмотров: 532;