Основные требования и классификация БКРПУ
Релейно-контакторное управление электроприводом основано на применении электромагнитных аппаратов, которые имеют ряд существенных недостатков, рассмотренных в сравнении с характеристикой БКРПУ ниже. Попытки избавиться от них привели к разработке бесконтактных устройств сначала на магнитных, а затем и на полупроводниковых элементах.
Большинство бесконтактных аппаратов статически, не имеющих подвижных частей. Электрические цепи в них в процессе работы не разрываются, а сигналы управления получаются за счёт дискретного изменения параметров составляющих их элементов (транзисторов, диодов, ферромагнитных сердечников).
Любая аппаратура должна быть долговечна, износоустойчива, проста в обслужи
вании и изготовлении.
Рассмотрим сравнительную характеристику РКА и БКРПУ.
| РКА | БКРПУ |
| 1. Работает с дугообразованием 2. Малая износоустойчивость 3. Инерционность в работе 4. Вибрация и подгорание контактов 5. Ограниченная частота включения 6.Нетехнологическая конструкция 7.Недостаточная вибро и удара стойкость 8.Большая мощность управления 9.Большие эксплуатационные расходы 10.Неодновременность включения контактов 11.Сохроняет работоспособность в определённом положении в пространстве 12. Шум при работе 13.Сложность и громоздкость во взрывозащищённом исполнении. | 1.Безискровая коммутация 2.Повышенный срок службы и надёжность 3.Безинерционность 4.Нет вибрации и подгорания Быстродействие и хорошая управляемость 6.Технологическая конструкция 7.Стойкие к вибрациям и ударам 8.Малая мощность управления 9.расходы на эксплуатацию практич. отсутствуют. 10.возможность регулирования выходных параметров 11.Нет необходимости ориентировать в пространстве 12.практически бесшумная работа 13.Простота конструкции во взрывозащищённом исполнении. |
Рассмотренная сравнительная оценка качества конструкций и работы РКА и БКРПУ приводит к выводу, что приемуществоа БКРПУ неоспоримы. Они в большей степени удовлетворяют разнообразным требованиям, предъявленным к системам управления электроприводами и конструкции их аппаратуры.
Однако и БКРПУ имеют недостатки. К ним можно отнести дороговизну в сравнении с РКА, чувствительность к внешним помехам, нестабильность параметров при колебании температуры.
Поэтому при определённых условиях РКА сохраняет конкурентоспособность с БКРПУ. В других случаях устройства с БКРПУ неоспоримы.
Статические бесконтактные аппараты аналогичны релейно-контакторным. Они обладают дискретным действием, характеризуемым двумя состояниями "включено" и "отключено". Поэтому к ним в полной мере применима теория релейных схем. И более того, только с её применением можно рассмотреть работу БКРПУ.
Многообразные устройства БКРПУ можно классифицировать по различным признакам: по фазности схем, по конструкции схем по способу регулирования выходной величины, по назначению и применению. Эту классификацию можно представить следующей схемой:
| БКРПУ |



 Однофазные Трёхфазные
Однофазные Трёхфазные
       Монопо лярные Монопо лярные
| Биполя рные | Мосто вые | Полно фазные | Неполнофазные |


С естественной С принудительной
Коммутацией коммутацией




С фазовым регулиро С широтно им-
ванием пульсным
 |
| Переключатели | Пускатели | Регуляторы тока | Регуляторы напряжения | Реверсоры тока | Ограничители тока | Синхронизаторы | Стабилизаторы |
2.1.2. Понятие алгебры логики и основные логические функции
Структура релейных схем может быть изображена графически в соответствии с ГОСТ 2.743-72 и ГОСТ 2.755-74 и аналитически в виде структурных формул.
В релейных устройствах каждый сигнал может иметь только два значения, поэтому преобразование входных сигналов в выходные обычно выполняются с помощью законов алгебры логики, созданной в 19 веке Дж. Булем.
Входные и выходные сигналы элементов релейных схем можно записать в виде буквенных обозначений, а функциональные зависимости между ними - в виде алгебраических формул, в которых связи между переменными выражаются специальными логическими символами. Эти структурные формулы характеризуют функцию.
Как в релейных, так и в бесконтактных схемах различают входные элементы, промежуточные элементы, функции и переменные. Поэтому бесконтактные элементы можно характеризовать релейными эквивалентными схемами. Релейные схемы имеют замыкающие и размыкающие контакты.
Обозначим все элементы и символы буквами латинского алфавита:
· Входные элементы A,B,C,D
· Контакты входных элементов
замыкающие a,b,c,d
размыкающие a/,b/,c/,d/
· Входные сигналы a,b,c,d
· Промежуточные элементы и функции Р1,Р2,Р3,Р4
· Промежуточные переменные р1,р2,р3,р4
· Исполнительные элементы и выходные
Функции X,Y,Z,V
· Контакты исполнительных элементов
замыкающие x,y,z,v
размыкающие x-,y-,z-,v-
· Входные переменные x,y,z,v
Функции называют логическими, а элементы, выполняющие эти функции - логическими элементами. Наибольшее распространение получили двоичные логические элементы, которые имеют два значения: "0" и "1".
Релейная схема предназначена для выполнения определённых функций. Поэтому её необходимо рассматривать как схему, реализующую сложную функцию с несколькими входными и выходными переменными.
Рассмотрим логические функции с одной входной и одной выходной переменными. Обозначим входной и выходной сигнал буквами, в соответствии с выше принятыми обозначениями а и v. Каждая из них может принимать только два значения "0" и "1". Все возможные варианты состояния переменных занесём в таблицу.
| Значения аргумента и функц. | v1=a | v2=a- | v3=0 | v4=1 | |||||
| a | |||||||||
| v | |||||||||
Функция v1=a называется повторением и обозначает совпадение входного и выходного сигналов.
Функция v2=а - называется инверсией (отрицанием), поэтому её называют функцией НЕ.
Функция v3=0; v4=1 выражают независимость выходной величины от входной. Их называют соответственно нулевой и единичной.
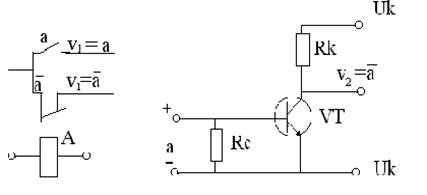 |
Рисунок 2.1.1. Схемы реализации функций
повторения и инверсии
Эти простейшие функции можно реализовать как при помощи контактных, так и бесконтактных схем.
На рисунке 2.1.1. представлены контактная и бесконтактная схемы, реализующие функции повторения и инверсии.
Схема с электромагнитным реле А реализует функцию повторения через контакт, замыкающий выходную цепь, а v1=a, а при помощи контакта а- -функцию инверсии. Бесконтактная схема на полупроводниковом транзисторе vт - функцию инверсии (v2=a-). 
Реализация нулевой функции может быть осуществлена постоянным отключением нагрузки от источника питания, а единичная функция постоянным включением нагрузки на напряжение сети.
Для двух переменных входные сигналы а и в образуют четыре комбинации: (0,0), (0,1), (1,0) и (1,1). Этим комбинациям входных сигналов соответствуют 16 комбинаций выходных сигналов.
Основными логическими функциями кроме рассмотренных выше являются: логическое произведение, конъюнкция (функция И) и логическое сложение -дизъюнкция (функция ИЛИ). Конъюнкцию обозначают 

 знаком ^ или &. Дизъюнкцию -+. или .
знаком ^ или &. Дизъюнкцию -+. или .
На рисунке 2.1.1. приведены схемы реализации функций дизъюнкций и конъюнкций на контактных элементах (схема 2.1.2. а ) и схемы записи операций при анализе и синтезе схем (схема 2.1.2. б).
На рисунке 2.1.3. приведены электрические схемы на бесконтактных элементах: 2.1.3. а)- схема И; 2.1.3. б)- схема ИЛИ.
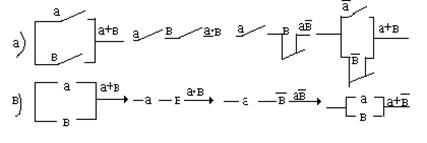
Рисунок 2.1.2. Схемы на контактных элементах
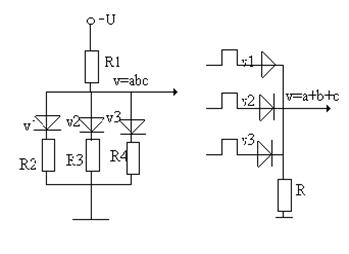
Рисунок 2.1.3. Схемы на бесконтактных элементах.
Системы элементарных логических функций, включающие функции И, ИЛИ, НЕ, называются функционально полными, так как позволяют реализовать любую сколь угодно сложную функцию одним аналитическим выражением.
Правила логического сложения и умножения приведены в таблице 1.1.2
Таблица 1.1.2.
| а | ||||
| в | ||||
| v=ab | ||||
| v2=a+b |
На рисунке11.1.4 представлены электрические бесконтактные схемы для получения функции ИЛИ - НЕ
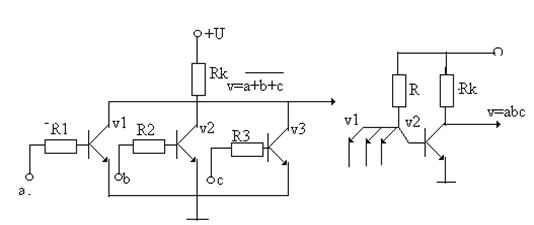
Рисунок 2.1.4. Схемы ИЛИ-НЕ и И-НЕ на интегральных элементах.
(а) и функции И - НЕ (б).
Если имеется какая-то функциональная зависимость (структурная формула), то по ней можно построить принципиальную электрическую схему на контактных и бесконтактных элементах. Для этого достаточно заменить переменные без знака инверсии замыкающими контактами или символами бесконтактных элементов без знака инверсии, а инверсные переменные - размыкающими контактами (символами со знаком инверсии).
 |
Основные логические функции на структурных схемах обозначаются следующим образом ( Рисунок 11 - 1 - 5)
Рисунок 2.1.5.
2.1.3. Основные законы алгебры логики
В алгебре логики существуют четыре пары основных законов: два переместительных, два сочетательных, два распределительных и два закона инверсии.

Переместительный закон. Порядок расположения переменных не влияет на логическую сумму (рис.2.1.6. а и б) и логическое произведение(рис.2.1.7. а и б)
а) б)
Рис. 2.1.6. Схемы, реализующие переместительный закон
суммы.

а) б)
Рис2.1.7. Схема реализующая переместительный закон произведения.
Сочетательный закон. Результат последовательного сложения (рис 2.1.8. а и б) или умножения (рис. 2.1.9. а и б) нескольких переменных не зависит от порядка этих действий:
(а+в)+с=а+(+с) (ав)с=а(вс)
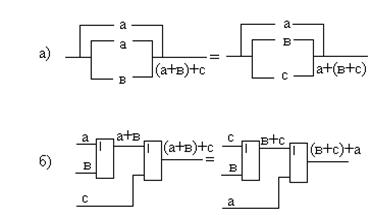
Рис. 2.1.8. Схема, реализующая сочетательный закон сложения.
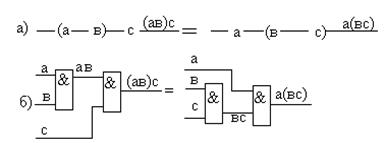 |
Рис. 2.1.9. Схема, реализующая сочетательный закон
умножения.
Распределительный закон. Распределительный закон сложения гласит о том, что общий множитель всегда можно вынести за скобки: ас+вс=(а+в)с.
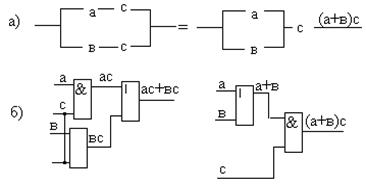 Поясняющая схема представлена на рисунке 2.1.10.
Поясняющая схема представлена на рисунке 2.1.10.
Рис.2.1.10. Схема реализации распределительного
закона сложения
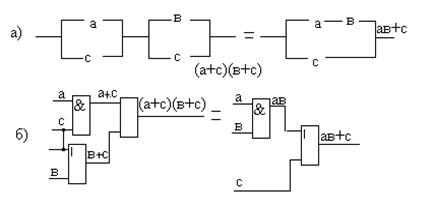 Рис. 2.1.11. Схема реализации распределительного
Рис. 2.1.11. Схема реализации распределительного
закона умножения
Если переместительные, сочетательные законы подобны аналогичным законам алгебры, то распределительный закон умножения алгебры логики не имеет аналогии:
(а+с)(в+с)=ав+с
Его реализация представлена на рисунке 2.1.2.
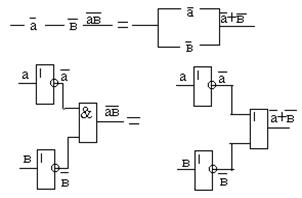 |
Законы инверсии. Инверсия суммы входных переменных равна произведению инверсий этих переменных и наоборот. Их реализация представлена на рис 2.1.12.
Рис.2.1.12. Схема реализации закона инверсии.
Из основных законов алгебры логики вытекают следующие выводы:
1)а 
 0=0; 2) а 1=а; 3) а а=а; 4) аа-=0; 5) а_-=а
0=0; 2) а 1=а; 3) а а=а; 4) аа-=0; 5) а_-=а
6)а+0=а; 7)а+1=1; 8)а+а=а; 9) а+а-=1; 10) а+аб=а(1+б);
11) а(а+б)=аа+аб=а+аб=а;
12)а+а-б=(а+а-)(а+б)=1(а+б)=а+в;
13)а-+аб-=(а-+а)(а-+б-)=1(а-+б-)=а-+б-;
14)а-(а+б)=а-а+а-б=0+а-б;
15)а(а-+б)=аа-+аб=аб.
2.1.4. Логические элементы, применяемые для
управления электроприводами
Логические элементы - это устройства, реализующие элементарные логические функции и служащие для построения более сложных устройств дискретного действия. Их входные и выходные сигналы имеют только два рабочих значения, соответствующих логическим нулю и единице.
Провод, по которому передаётся логический дискретный сигнал, можно рассматривать как технический аналог логической переменной, а шины питания как технический аналог нулевой и единичной функции.
Логические элементы выпускаются в виде серий, представляющих полный набор элементов, в котором используются: одинаковый способ представления информации, единый метод технической реализации логических функций, одинаковые способы межэлементных связей. На ряду с элементами выполняющие логические операции, в серию входят элементы времени, усилия электрических сигналов и исполнительные элементы.
В различное время выпускались:
1. "Логика М"- серии магнитных элементов с частотой питания 50 Герц;
2. "Логика МК" -серии магнитных элементов с частотой питания 400 Герц;
3. "Логика Т"-серии диодно-транзисторных элементов, оформленных в виде модулей на гетинаксовых печатных платах, которые помещены в полистироловый корпус и залитых эпоксидным компаундом. Конструкция неразборная и неремонтоспособная.
4. "Логика И"- серии на базе интегральных микросхем серии К155.
Серия "Логика И" состоит из четырёх групп элементов: логических, функциональных, времени и выходных (усилительных) элементов.
Логические элементы реализуют логические функции. Функциональные согласуют аппараты управления (кнопки, датчики, выключатели и т.п.) с логическими элементами. Элементы времени для получения выдержек от 0.01 до 10 секунд. Выходные элементы согласуют параметры логических элементов с параметрами исполнительных выходных устройств.
Напряжение питания всех элементов, за исключением входных и исполнительных элементов 15 Вольт. В серии используется потенциальный способ представления информации.
Кроме выше перечисленных логических элементов для построения схем бесконтактного управления электроприводом и автоматизации промышленных установок используют серии полупроводниковых интегральных микросхем К155, К511, К555 и другие.
2.1.5. Тиристор - силовая основа БКРПУ
Переключение в цепях электродвигателей можно осуществлять как при помощи контактов контакторов, пускателей, реверсоров, так и бесконтактных полупроводниковых устройств. В БКРПУ в качестве таковых широкое распространение получили тиристоры и симисторы.
Основой управляемых вентилей - тиристоров является четырёхслойная р-н-р-н структура, содержащая три р-н перехода. Тиристор сохраняет, в отличие от неуправляемого вентиля, состояние низкой проводимости не только при приложенном обратном, но и прямом напряжении.
Если +Е приложить к аноду А(рис.2.1.13.), а -Е к катоду, то повышается потенциальный барьер перехода п2, а переходы п1 и п3 будут находиться в прямом проводящем состоянии. Полупроводниковая структура оказывается в прямом запертом состоянии, которое сохраняется до тех пор, пока от вспомогательного источника "е" через управляющий вывод на переход п3 не будет подано прямое напряжение. При этом потенциальный барьер перехода п3 понижается и в цепи источника "е" протекает ток Iу. Часть электронов проводимости слоя п2, преодолевших потенциальный барьер перехода п3 и попавших в слой р2, захватывается полем пространственного заряда перехода п2 и переводится в слой н1, нарушая его электрическую нейтральность. Это приводит к понижению потенциального барьера перехода п1. Часть дырок из слоя р1 преодолевает потенциальный барьер перехода п1 достигнет перехода п2, захватывается его полем и переводится в слой р2, понижая потенциальные барьеры переходов п2 и п3. В результате ток через полупроводниковую структуру лавинообразно возрастает и тиристорная структура включает в прямое проводящее состояние.
Наименьший ток управления Iу, необходимый для включения тиристора, называется отпирающим током управления Iумин.
Время от момента подачи тока управления до 90% Iу уст называют временем включения.
Во включённом состоянии тиристора соотношение дырочного и электронного токов таково, что на переходе п2 устанавливается прямое смещение, и ток через тиристор продолжает протекать, если даже ток в цепи управления прекратится.
Ток через тиристор будет протекать до тех пор, пока его величина не уменьшится до значения, неспособного поддержать требуемое соотношение дырочного и электронного токов через р-н переход п2 и на нём не появится обратное смещение.
 |
Рис.2.1.13. Распределение областей объёмного заряда
при различных смещениях.
Минимальный ток через тиристор при разомкнутой цепи управления, при котором тиристор ещё находится во включённом состоянии, называется током удержания.
Если напряжение +Е, прикладываемое к аноду тиристора, находящегося в закрытом состоянии, увеличивать, то оно будет приложено в основном к переходу п2, смещая его в обратном направлении. При некотором значении напряжения в переходе п2 возникает лавинное умножение носителей заряда. При этом ток через переходы п1 и п3 возрастает, стимулируя дальнейшее умножение носителей заряда в п2 и при определённом токе, называемом током переключения Iпер, в переходе п2 возникает прямое смещение и тиристор откроется при отсутствии Iу. Протекание тока в цепи управления тиристором значительно уменьшается напряжение переключения. Это хорошо просматривается на вольтамперной характеристике (прямая ветвь), представленной на рисунке 2.1.14.а.
При смене полярности питающего напряжения, когда к тиристору приложено обратное напряжение (обратная ветвь на ВАХ рис. 2.1.14.), восстановление его запирающих свойств происходит также, как у диода. Сначала через тиристор проходит большой по величине обратный ток, удаляя из приконтактной области переходов п1 и п3 избыточные носители зарядов. Через некоторый промежуток времени (микросекунды) ток спадёт до нуля и тиристор закроется. Однако, если к тиристору в этот момент вновь приложить прямое напряжение, то тиристор вновь откроется без управляющего тока, так как в переходе п2 ещё имеется большое количество носителей заряда. Подать прямое напряжение на тиристор можно будет только тогда, когда этот заряд спадёт до нуля.
Время от момента, когда прямой ток спадёт до нуля, до момента, когда тиристор способен выдерживать, не переключаясь, прямое напряжение, называется временем включения.
Если к тиристору прикладывать прямое напряжение с большей скоростью его нарастания, то протекающий ёмкостный ток может вызвать самостоятельное включение тиристора - эффект du/dt.
Максимальная скорость нарастания прямого напряжения, при которой тиристор не переключается при заданном напряжении и разомкнутой цепи управляющего вывода, называется критической скоростью нарастания прямого напряжения.
При включении тиристора током управления размеры области включения невелики, что при большой скорости нарастания анодного тока может привести к расплавлению кремния в р-н переходе. Это явление получило название эффекта di/dt.
Максимальная скорость наростания прямого тока через тиристор, при которой не возникают необратимые процессы в р-н-р-н -структуре, называется критической скоростью нарастания прямого тока.
Выводы:
1. Тиристором можно управлять величиной управляющего тока Iу.
2. Тиристор можно открыть амплитудой прямого анодного напряжения.
3. Запирается тиристор только обратной полярностью анодного напряжения.
4. При выборе тиристора необходимо учитывать скорость нарастания прямого напряжения и тока.
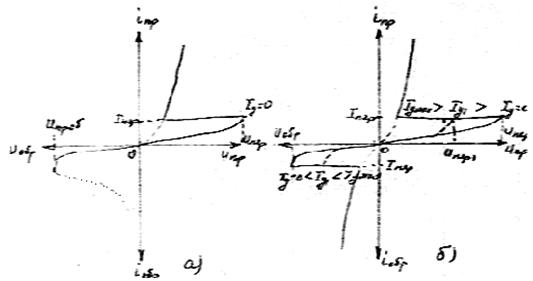 |
Для применения в цепях переменного тока разработан симметричный тиристор - симмистор, основой которого является п-р-п-р- структура, представляющая собой две встречно - параллельно включенные тиристорные структуры с общей цепью управления. ВАХ- на рис.2.1.14.б.
Рис.2.1.14. Вольтамперные характеристики тиристора (а)
и симистора (б).
2.1.6. Принципы управления тиристорами
 Для полупроводникового прибора с р-н-р-н- структурой требуется достаточный ток и напряжение управления, соответствующее характеристика управления, характеру его нагрузки и источнику питания, не превышающие допустимых значений. По многим причинам тиристоры имеют достаточно большой разброс параметров управления не только для разных типов и серий, но и в одной серии. Поэтому каждая серия тиристоров характеризуется статическими характеристиками цепей управления.
Для полупроводникового прибора с р-н-р-н- структурой требуется достаточный ток и напряжение управления, соответствующее характеристика управления, характеру его нагрузки и источнику питания, не превышающие допустимых значений. По многим причинам тиристоры имеют достаточно большой разброс параметров управления не только для разных типов и серий, но и в одной серии. Поэтому каждая серия тиристоров характеризуется статическими характеристиками цепей управления.
Статические характеристики цепей управления тиристора приведены на рисунке 2.1.15.
Каждый тиристор при заданном анодном напряжении и определённой температуре включается в определённой точке входной характеристики (Iуо и Uуо). Заводы изготовители гарантируют надёжное включение тиристора, ограничивая поле разброса параметров кривыми с максимальными Rвх.мах. и минимальными Rвх.мин входными сопротивлениями. В области 1 гарантированного включения тиристоров не происходит, так как ток управления меньше тока спрямления. Область 2 ограниченна снизу линиями UусА и IусА, определяемыми напряжениями и токами спрямления при минимальной рабочей температуре окружающей среды. С увеличением температуры эти линии смещаются вниз. Сверху гарантированная область надёжного включения ограничена линией максимальной мощности управления, представляющей собой гиперболу Ру.мах. При расчёте устройств запуска:
Iуо> Iу.с; Uуо >Uу.с; Iуо Uуо< Pмах.
Таким образом значения напряжений холостого хода и тока короткого замыкания цепи управления должны определятся прямыми, проходящими через точки А и К.
Для управления тиристорами можно с успехом применить простейшие схемы управления, представленные на рисунке 2.1.16.(а-е).
Рис. 2.1.16.а представляет схему управления частью анодного тока, подаваемого на управляющий электрод через токоограничивающее сопротивление, состоящее из регулируемого и не выключаемого резисторов R1 и R2. Диод V2 препятствует появлению обратного напряжения на управляющем электроде в непроводящий полупериод. Интервал углов регулирования 0 …..90*.
На рис. 2.1.16.б представлена схема аналогичная предыдущей, но работающая в оба полупериода
питающего напряжения.
Введение в схему управления реактивностей может расширить диапазон регулирования.
Так комбинация , RC - цепи и диода (рис. 2.1.16. в) позволяет получить угол включения 0…180*. Во время положительного полупериода конденсатор заряжается до напряжения включения тиристора, а во время отрицательного перезаряжается до амплитуды отрицательного напряжения, обеспечивая тем самым подготовку к следующему циклу. Время заряда, а следовательно, и угол включения определяется постоянной времени RС цепи.
На рис. 2.1.16.г, д. показаны схемы с насыщающимся дросселем в релейном режиме. Дроссель включается параллельно входу тиристора или последовательно с ним. Работа схемы основана на возможности перевода дросселя в насыщенное или ненасыщенное состояние сигналом, подаваемым на входную обмотку. Если в схеме г) сердечник дросселя не насыщен, то во время положительного полупериода питающего напряжения через резисторы R1 и R2, диод оно поступает к управляющему электроду тиристора и включает его. Если же дроссель насыщен, то его обмотка шунтирует входную цепь.
В схеме рис.д) при ненасыщенном дросселе ток через резистор R1и диод V заряжает конденсатор С. Резистор R2 не даёт напряжению на Уэ дорасти до тока включения. При подаче напряжения на входную обмотку дроссель насыщается, что вызывает разряд конденсатора на УЭ и включении тиристора.
В схеме управления 2.1.16. е) используется динистор - элемент, имеющий определённый порог включения.
Рассмотренные схемы просты. Это обуславливает их недостатки: разброс характеристик в пределах температурного диапазона и небольшую скорость нарастания тока управления. Поэтому их используют в простейших случаях. Для управления тиристорами в преобразовательных устройствах применяют специальные схемы.
2.1.7. Силовые схемы БКРПУ
Однофазные и трёхфазные БКРПУ имеют исполнительные органы в виде управляемых и
неуправляемых приборов, соединённых в различных комбинациях. Основные варианты силовых схем БКРПУ, выполняющих роль однофазных коммутирующих и регулирующих устройств показана на рис.2.1.17., а трёхфазных - на 2.1.18
Включение управляемых вентилей всех схем должно осуществляться при формировании системой управления сигнала, подаваемого на УЭ тиристора в течении положительного полупериода питающего напряжения. Управляющие сигналы должны следовать с частотой напряжения питающей сети и обеспечивать надёжное включение тиристоров каждый раз после прохождения через нуль силового тока.
При активно - индуктивной нагрузке и работе без регулирования сигналы на УЭ должны подаваться со сдвигом по фазе, равным фазовому углу нагрузки  :
:
 = =arctg
= =arctg  (2.1)
(2.1)
При работе БКРПУ на АД с КЗ или фазным ротором, который является переменной активно - индуктивной нагрузкой, Фазовый угол, а, следовательно, и угол управления зависят от скольжения двигателя и изменяются в широких пределах.
В схеме рисунка 2.1.17,а тиристор защищён от обратного напряжения диодом и выбирается только по прямому напряжению переключения и току. Схема рисунка 2.1.17б была наиболее распространена до внедрения в производство силовых симисторов (рис.2.1.17е)
Схема рис. 2.1.17д). применяется в БКРПУ, которые используются в качестве выключателей с ограничением тока короткого замыкания. Устройство позволяет обеспечить плавное нарастание тока при включении, уменьшить падение напряжения в установившемся режиме и ограничить т.к.з.
Схемы на рисунке 2.1.18. различаются между собой числом тиристоров и способом их включения относительно нагрузки. Во всех схемах (кроме 2.1.18ж) тиристоры работают в облегчённых условиях при протекании т.к.з., так как они включены после нагрузок.
Дата добавления: 2019-07-26; просмотров: 368;