КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИКИ
Автоматические системы, используемые в строительных :мащинах. и оборудовании для контроля, регулирования и управления, можно классифицировать по ряду признаков.
По характеру алгоритма управления различают системы по разомкнутому и замкнутому (с обратной связью) циклам, а также комбинированные системы. В первом случае в системе отсутствует обратная связь и управление является жестким. В такой системе (рис.3,а) задающий сигнал Х поступает в управляющее устройство УУ, из которого сигнал управляющего воздействия УВ направляется к объекту
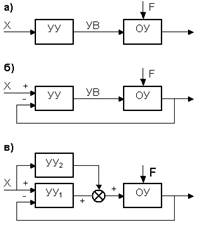 Рис.3. Системы автоматического управления: а — по разомкнутому циклу; б — по замкнутому циклу; в ‑ по комбинированной схеме
Рис.3. Системы автоматического управления: а — по разомкнутому циклу; б — по замкнутому циклу; в ‑ по комбинированной схеме
|
управления ОУ для получения выходных координат У с учетом возможного воздействия сторонних помех F. При управлении по замкнутому циклу (рис.3,б} в случае отклонения выходного параметра от заданного значения сигнал возвращается объектом управления на управляющее устройство для корректировки, Такие системы работают с изменяемыми структурой и законом управления. Комбинированное управление (рис.3,в) характеризуется начием в системе обратной связи и резервного управляющего устройства, подключаемого параллельно первому через элемент сравнения (анализатор). Установленные на схемах знаки «плюс» и «минус» характеризуют положительные или отрицательные значения задающего воздействия.
Устройства обратной связи объединяют под понятием «регуляторы», которые различают как регуляторы прямого (использующие энергию объекта) и непрямого (требующие дополнительного электроснабжения— усилителя) действия. В зависимости от числа каналов обратной связи различают одноконтурные и многоконтурные системы, и последних всегда более одной замкнутой цепи воздействия.
По характеру применяемых сигналов различают непрерывные и дискретные (импульсные, релейные) системы.
По характеру изменения сигналов задатчика системы делят на стабилизирующие, программного управления и следящие. В стабилизирующих системах по поступающим постоянным сигналам выходные параметры поддерживаются практически с постоянными значениями (например, стабилизация температуры двигателя). В системах программного управления сигналы из задающего устройства меняются по заранее установленным законам и выходные параметры также изменяются во времени и пространстве. В следящих системах значения заранее неизвестны и из блока задающего устройства поступают случайно изменяющиеся сигналы, измеряемые соответствующими датчиками. Эти системы, в свою очередь, делятся на автономные, копирные и комбинированные.
По количеству выходных параметров различают одномерные и многомерные системы.
По расположению измерительных и сигнальных устройств относительно управляемого объекта и по его расположению относительно пульта автоматические контроль и управление разделяют на местные и дистанционные. Местный контроль и управление наибольшее распространение получили в передвижных, в том числе в строительных машинах. Дистанционный контроль и управление используют при одновременной работе с несколькими машинами или для приближения его к месту выполнения технологических операций рабочим органом машины. При этом значительно увеличивается роль каналов связи, осуществляющих передачу сигналов на расстояние. В качестве каналов связи используются механические, гидравлические, пневматические, электрические и комбинированные (смешанные) передачи.
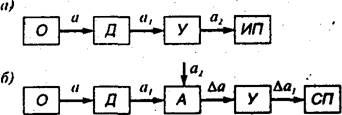 Рис.4. Блок-схемы САК
Рис.4. Блок-схемы САК
|
Рассмотрим блок-схемы основных автоматических систем, используемых для контроля, управления и регулирования. Системы автоматического контроля (САК) работают по разомкнутому циклу и могут быть как прямого, так и непрямого действия. В блок-схеме системы автоматического контроля непрямого действия (рис.4,а). контролируемая величина а с объекта О, осуществляющего производственный процесс, подается на датчик Д, передающий сигнал а1 дальше на усилитель У, от которого сигнал а3 поступает на измерительный преобразователь ИП.
При использовании в качестве конечного элемента сигнального преобразователя (рис.4,б) система автоматического контроля усложняется. В этом случае контролируемая величина а объекта О также подается на датчик Д. Однако в дальнейшем сигнал а1 от датчика поступает в сравнивающее устройство (анализатор) А. В анализаторе происходит сравнение сигнала а1 с сигналом а2, который должен быть равен сигналу а1 в соответствий с заданным значением величины а. При несовпадении сигналов а1 и а2 анализатор посылает сигнал Δа об отклонении контролируемой величины аот заданного параметра. После прохождения усилителя У сигнал Δа1 поступает на сигнальный преобразователь СП. В отличие от рассмотренных схем автоматического контроля в системах прямого действия отсутствует усилитель.
По числу контролируемых величин различают единичный и множественный автоматический контроль, в одном из которых осуществляется контроль только одного параметра рабочего процесса и. только в одном месте, а во втором — контроль нескольких параметров или одного параметра в нескольких местах при выполнении определенного технологического процесса. Множественный контроль, в свою очередь, делится на параллельный, последовательный и смешанный, представляющий сочетание из двух основных. При параллельном контроле используется необходимое количество каналов, обеспечивающих контроль всех измеряемых параметров во всех местах их расположения. Последовательный контроль позволяет получить информацию от нескольких датчиков к одному сигнальному преобразователю или же датчик, имеет возможность перемещаться поочередно к различным местам получения информации.
Системы автоматической защиты (САЗ) также работают по разомкнутому циклу и в большинстве случаев являются системами непрямого действия, так как для подачи звуковых и световых предупреждающих сигналов, а также для отключения энергоснабжения машины или отдельных ее узлов мощность сигнала, получаемого от датчика, недостаточна. В отличие от блок-схемы системы автоматического контроля здесь в конце цепи обычно используют реле или контактор, отключающие управляющие цепи привода объекта, а также применяют параллельное включение различных датчиков на один сигнальный прибор или устройство релейной защиты.
Системы автоматического управления (САУ) в основном работают по разомкнутому циклу, так как не получают информацию о действительном протекании технологического процесса, и практически всегда являются непрямого действия: В блок-схеме этого управления. (рис.5) задающий сигнал а поступает в управляющее устройство УУ, из которого сигнал а1 о необходимости управления объектом поступает в
 Рис.5. Блок схема САУ
Рис.5. Блок схема САУ
|
усилитель У. Усиленный сигнал а2 поступает в исполнительный орган ИО, оказывающий требуемое воздействие а3 на объект управленияОУ. Автоматическое управление бывает непрерывным и дискретным, по количеству управляемых объектов — единичным и множественным, а также местным и дистанционным. Примером местного единичного управления является работа однозубого рыхлителя по заданной программе.
Дистанционное множественное управление широко используется в асфальто- и цементобетонных установках и заводах.
Системы автоматического регулирования (САР) являются разновидностью автоматического управления и предназначены для сопоставления действительного значения параметров выполняемого процесса с заданным и с дальнейшим управлением объектом в зависимости от результатов сопоставления (т.е. управление с использованием информации о результатах управления).
В соответствии с этим система автоматического регулирования осуществляет не только управление объектом, но и одновременный контроль за его правильной работой. Следует также отметить, что в системах автоматического регулирования рассматривается совместная работа регулируемого объекта и регулирующих устройств.
К регулирующим устройствам относятся автоматические регуляторы, позволяющие без участия человека выдерживать заданные параметры с требуемой степенью точности. Так как автоматический регулятор воздействует на регулируемый объект, а регулируемые параметры воздействуют на регулятор, вызывая в нем требуемое управляющее воздействие, цепь воздействия оказывается замкнутой и система работает с обратной, связью.
В соответствии с используемой, по характеру изменения сигналов задатчика, системой (стабилизирующая, программная, следящая) изменяется и состав автоматического регулятора. Однако в общем случае блок-схема практически не изменяется. Рассмотрим состав и работу блок-схемы системы автоматического регулирования для ее различных видов.
Блок-схема системы автоматического регулирования (рис.6) включает в себя объект регулирования ОР и автоматический регулятор АР, все элементы которого расположены внутри прямоугольника, обозначенного на схеме пунктиром. Регулируемый параметр а поступает из объекта регулирования ОР на датчик Д, откуда сигнал а1 поступает в анализатор А, где сопоставляется с заданным значением регулируемого параметра а2- При значительном расхождении параметров а1 и а2 анализатор подает о полученной разницесигнал Δа=с в усилитель У. Усиленный сигнал с1 поступает в исполнительный орган ИО; изменяющий рассогласованный сигнал и передающий отрегулированное воздействие с2 на объект регулирования ОР.
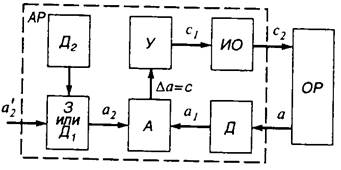 Рис.6. Блок схема САР
Рис.6. Блок схема САР
|
При различных видах систем автоматического регулирования в них вводятся дополнительные устройства.
В стабилизирующей САР вводится задатчик З, подающий постоянный сигнал а2 (соответствующий такому сигналу а1, который появляется в датчике Д при соразмерности регулируемого параметра азаданному постоянному значению) в анализатор А.
В программной САР сигнал а2, изменяющийся по заданному закону во времени, подается в анализатор А также от задатчика З. Однако для перемещающихся во время работы машин, регулируемые параметры которых изменяются по заданной функций пути, сигнал задатчика связан с длиной пройденного пути, измеряемого дополнительным датчиком времени или пройденного пути Д2.
В следящей САР вместо задатчика используется дополнительный датчик Д1, измеряющий значение внешней переменной величины а2 в соответствии с которой регулируется параметр а. Различают САР прямого и непрямого действия, непрерывные и дискретные, одно- и многоконтурные и т.д.
Наряду с вышерассмотренными, в системе автоматического регулирования используется и самонастраивающаяся (адаптивная) система, определяющая путем автоматического поиска такое значение регулируемого параметра, которое обеспечивает наивыгоднейший режим работы регулируемого объекта при изменяющихся условиях его работы.
В качестве рабочих элементов в автоматических системах управления, регулирования, контроля и защиты используются датчики и устройства контроля и регулирования, усилители, микропроцессоры и исполнительные механизмы.
Дата добавления: 2018-06-28; просмотров: 2674;