Механизм управления НПП типа ИМ-1
Предполагает структуру, где отрицательной обратной связью в автоматическом и следящем режимах охватывается сервопривод. Используется в РЭГ-приводах вновь строящихся судов с рулевыми машинами типизированного ряда.
Прибор ИМ-1 по устройству аналогичен ИМ-2 (см. рис. 267), у которого выходом является не рейка 5, а поворотный валик 7. Последний имеет пружинный нуль-установи-
тель и связан с золотником управляющего гидромеханизма поворота люльки насоса.
При простом управлении режимная стабилизация достигается четкой работой пружинного нуль-установителя, снимающего подачу гидронасоса при отключении серводвигателя.
В следящем режиме напряжение сельсин-трансформатора 8 характеризует положе-
ние управляющего органа. Это напряжение и является электрической обратной связью, замыкающей контур, состоящий из усилителя и сервопривода.
Сервомеханизм размещается на насосе и воздействует на манипулятор через встро-
енный промежуточный гидроусилитель.
На эксплуатируемых судах широко используется схема механизма управления, где обратной связью охвачены рулевая машина и насос переменной подачи. Эта обратная связь механическая, жесткая. Выполняется посредством специальных кинематических устройств, предопределяющих относительную близость размещения насоса и рулевой машины.
Механизм управления НПП с рычажным дифференциалом
Приводы с таким типом управления (рис. 268) установлены на многих судах, например на теплоходах серий «Михаил Калинин», «Выборг», «Красноград», лесовозах типа теплоход «Волго-лес» и др.
Рулевой привод имеет два насоса переменной подачи HI (H2 - не показан), каждый из которых вращается своим исполнительным двигателем М1(М2).
Тяга 1 манипуляторов является общей для обоих насосов; при необходимости они могут работать на рулевую машину одновременно.
Рассмотрим принцип действия кинематического механизма, разбив процесс управ
ления па ряд простых операций.
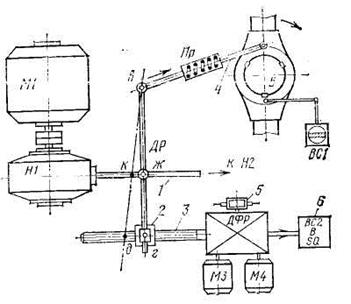
Рис. 268. Схема управления гидравлической рулевой машиной с рычажным дифференциалом
Перекладка руля задается включением электрического серводвигателя МЗ (М4). Через дифференциальный редуктор ДФР вращается винтовой шпиндель 3, который перемещает по горизонтали каретку 2.
Пусть, например, каретка переходит из точки г в точку д. Дифференциальный рычаг ДР, связанный с кареткой, поворачиваясь вокруг неподвижной точки в, смещает тягу 1 манипулятора насоса H1.
Начинается подача масла в гидроцилиндры рулевой машины, руль перекладывает-
ся по часовой стрелке. Тягой обратной связи 4 дифференциальный рычаг ДР, поворачива-
ясь вокруг точки д, смещает манипулятор в сторону нейтрального положения, достигнув которого в точке ж, перекладка прекращается.
Изменение направления подачи насоса и соответственно обратная перекладка руля происходит при перемещении каретки в другую сторону.
Значение эксцентриситета насоса равно 15 - 25 мм; тяга манипулятора, пройдя это расстояние, доходит до упора. Перемещение в этих пределах обычно соответствует заданию перекладки руля на 4 - 5°.
При задании больших углов, когда манипулятор достигает положения упора, дифференциальный рычаг ДР при перемещении каретки будет поворачиваться в шарнире связи его с управляющей тягой насоса. Движение будет происходить из-за сжатия или растяжения пружины Пр, являющейся составной частью рычага 4.
При углах, больших 4 - 5°, перекладка на основной части пути ведется при макси-
мальной подаче насоса, примерно с постоянной скоростью. Лишь при подходе к заданно-
му положению за 4 - 5° подача насоса постепенно снимается.
Пружина Пр одновременно оказывает демпфирующее действие при ударных нагрузках на баллере. При случайных отклонениях баллера, через рычаг ДР, задается необходимая подача насосу и положение восстанавливается.
В динамике, когда перемещение каретки и баллера происходит одновременно, дифференциальный рычаг суммирует оба движения и задает подачу насосу, эквивалентную разностному положению каретки и баллера в каждый данный момент.
Повышенная скорость каретки сравнительно с баллером всегда обеспечивает выход насоса на максимальную подачу при больших углах перекладки.
Действительный угол руля контролируется по аксиометру, работающему от балле-
ра через датчик ВС1. При управлении оператор следит за движением каретки по аксиометру заданного положения, датчик которого ВС2 связан через редуктор со шпинделем. Сельсины-приемники, электрически связанные с ВС1 и ВС2, совмещаются в одном двухстрелочном приборе заданного и действительного положений.
Дистанционное управление осуществляется посредством серводвигателей, местное - штурвалом 5.
В схемах автоматического действия элементы обратной связи В, путевые и конечные выключатели SQ конструктивно представляются одним блоком 6, механически связан
ным не с отрабатывающим органом - баллером, а с задающим - кареткой.
Мощность электрических серводвигателей составляет 0,3—0,8 кВт.
Дата добавления: 2017-08-01; просмотров: 714;