Классификация наиболее распространенных датчиков дорожного движения?
Классификация датчиков, используемых для идентификации АТС, приведена на рис. По принципу действия датчики дорожного движения можно разделить на три группы: контактного типа, из- лучения, измерения параметров электромагнитных систем.
Датчики контактного типа (электромеханические, пневмо-электрические и т. п.) не получили распространения в системах управления дорожным движением из-за низкой надежности, зависимости от погодных условий и сложности обработки получаемых данных, так как они регистрируют не количество АТС, а количество осей.
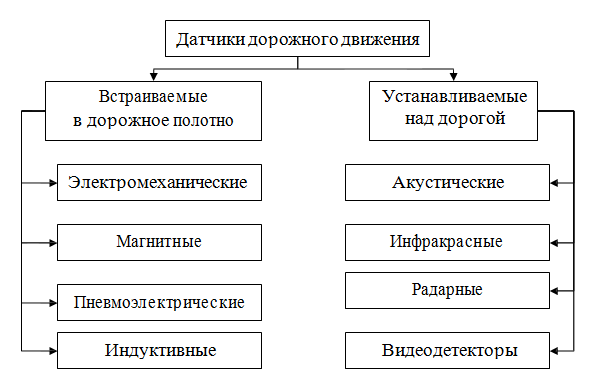
Рис. Классификация наиболее распространенных датчиков дорожного движения
Среди датчиков, устанавливаемых непосредственно в дорожном полотне, наибольшее распространение получил индуктивный датчик. Этому послужили такие факторы, как простота конструкции, надежность работы и низкая по сравнению с другими стоимость.
Индуктивный датчик представляет собой провод, расположенный в канавке дорожного полотна, который может иметь одну (или более) петлю различной формы. Провод для удобства контроля в эксплуатации через монтажный колодец соединен с контроллером, который передает сигнал датчика в систему управления дорожным движением.
На петлю подается переменный электрический ток, частотой от 10 до 200 кГц, который создает электромагнитное поле. Когда ТС проезжает по петле, шасси действует как проводник, сокращая индуктивность петли. Уменьшение индуктивности увеличивает резонансную частоту колебания в петле и посылается импульс на электронную плату.
Изменение частоты должно достигнуть некоторого предела прежде, чем контроллер интерпретирует это изменение как прохождение или наличие ТС. Способность петли обнаруживать ТС зависит от расстояния между проводом петли и металлическим шасси ТС.
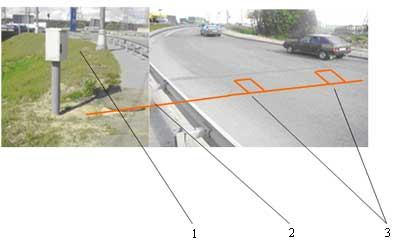
Рис. Основные компоненты индуктивного датчика: 1 – контроллер; 2 – медный провод; 3 – индуктивные петли (контуры)
Форма индуктивной петли должна быть выбрана на основе того, в каких условиях и какой объект необходимо обнаружить. Чувствительность оптимальна, если петля не больше, чем обнаруживаемый объект.
В противном случае на индуктивность петли будут влиять другие ТС, проходящие вне зоны детектирования. Увеличение размера петли уменьшит изменение индуктивности, вызываемое проездом ТС. Например: если ТС изменяет индуктивность на 1,0 % при проезде над рамкой размером 1,8×1,8 м, то же самое ТС изменит индуктивность на 0,5 %, когда проедет по петле размером 1,8×3,6 м.
Прямоугольная форма петли наиболее подходит для того, чтобы обнаруживать легковые автомобили и грузовики. Петли, установленные под углами в 45° относительно дороги, идеально подходят для того, чтобы обнаруживать велосипеды. Петля в форме восьмерки устанавливается перед железнодорожными путями. Индуктивные датчики по конструкции индуктивной петли можно разделить на следующие виды:
Датчики с малой областью обнаружения обычно состоят из единственной короткой петли средним размером 1,8×1,8 м. Как правило, используются для обнаружения приближающихся к светофору автомобилей для управления работой светофора.
Датчики с большой областью обнаружения используются для фиксации присутствия АТС в зоне контроля (до 20 м). Это позволяет реализовать алгоритм адаптивного управления на основе поиска разрыва в транспортном потоке. В качестве такого вида датчиков используются длинные индуктивные петли, которые в последнее время для повышения надежности заменяются на несколько последовательных коротких петель, устанавливаемых вдоль дорожного полотна перед стоп-линией. Для реализации широкой зоны обнаружения АТС используют широкие индуктивные петли. Они применяются для продления зеленого сигнала в случае образования затора. Когда автомобили занимают всю детектируемую зону рамки, происходит продление горения зеленого сигнала на этом направлении. Если нет полного заполнения этой зоны (автомобили стоят не на всех полосах), то продления разрешающего сигнала не происходит.
С помощью индуктивных датчиков можно реализовать следующие способы управления дорожным движением:
• определение моментов времени проезда АТС над определенным сечением дороги;
• определение интенсивности транспортного потока и объема движения за промежуток времени любой длительности;
• определение средней пространственной скорости потока на заданном участке дороги;
• обнаружение затора на заданном участке дороги;
• определение плотности потока на заданном участке дороги;
• определение длины очереди автомобилей у перекрестка в заданном направлении.
Индуктивные датчики широко используются для предоставления приоритета в движении общественному транспорту. Для этого чаще всего используются различные устройства, которые формируют управляющий импульс, распознаваемый контроллером. После этого алгоритм управления вырабатывает решение о продлении горения или включения зеленого сигнала светофора. При наличии выделенной полосы для движения общественного транспорта могут использоваться две последовательно установленные индуктивные петли. Если контроллер получает сигнал одновременно от двух датчиков, то по полосе движется автобус, тогда как легковой автомобиль не может одновременно занять пространство над двумя датчиками.
Датчики, устанавливаемые над дорогой, отличаются большей простотой установки, но являются более дорогими по сравнению с индуктивным детектором, и точность их показаний в большей степени зависит от погодных условий. Из этой группы датчиков чаще всего используются акустические и инфракрасные для фиксации присутствия АТС.
В России наибольшую популярность получил радиолокационный детектор транспорта. Детектор может быть использован:
• для работы в автоматизированных системах управления дорожным движением;
• адаптивного управления движением транспорта;
• контроля интенсивности движения;
• контроля на въездах – выездах скоростных дорог;
• проведения транспортных обследований;
• автоматического обнаружения дорожно-транспортных происшествий и т. д.
Принцип работы детектора основан на бесконтактном зондировании проезжей части дорожного полотна сигналом сверхвысокой частоты с линейной частотной модуляцией. Одновременно он может охватить несколько полос. Детектор монтируется на опорах освещения, опорах контактной сети, стенах зданий или других искусственных сооружениях, расположенных сбоку от проезжей части, устанавливается и настраивается без остановки движения транспорта. Детектор выполняет две следующие основные функции:
• регистрирует наличие движущихся АТС в зонах контроля;
• ведет статистический учет динамических параметров транспортных потоков (общее количество АТС, прошедших зону контроля;
• занятость зоны контроля как отношение времени, в течение которого зона контроля была занята АТС, ко времени статистического учета;
• средняя скорость транспортного потока; количество длинномерных АТС).
Данные сведения могут накапливаться во внутренней памяти детектора для последующего считывания или сразу передаваться в систему управления.
Необходимость использования комбинированных детекторов вызвана тем, что опыт использования более простых устройств не позволяет с удовлетворительной точностью определять все параметры транспортных потоков. Комбинированные детекторы устанавливаются над каждой полосой движения.
Комбинированный детектор использует следующие средства:
• Микроволновый радар, обеспечивающий измерение скорости движения каждой транспортной единицы.
• Ультразвуковой детектор, обеспечивающий классификацию транспортных средств на базе сканирования их профилей, а также индикацию стоящих автомобилей.
• Многоканальный инфракрасный детектор, обеспечивающий подсчет и уточнение интенсивности движения и занятость полосы движения. Если активизирован режим экономии электроэнергии, этот детектор применяется также для включения и выключения радара.
Наиболее перспективными датчиками считаются видеодетекторы. Система состоит из одной или нескольких видеокамер, сигналы от которых обрабатываются специальным быстродействующим программным обеспечением, которое позволяет устройству выполнять следующие функции:
• определять общее количество АТС, прошедших по каждой полосе движения за заданный промежуток времени;
• классифицировать прошедшие АТС по типам (мотоциклы, легковые автомобили, пикапы и малые грузовики (длиной менее 12 м), автобусы, большие грузовики (длиной более 12 м);
• подсчитывать среднюю скорость движения по каждой полосе для разных типов АТС;
• определять заполнение каждой дорожной полосы АТС (если АТС не движутся или движутся со скоростью менее 5 км/ч, ситуация на дороге классифицируется как транспортная пробка);
• фиксировать расстояние между АТС для каждой полосы. Одна видеокамера позволяет одновременно считывать данные с четырех полос движения. Существенным достоинством видеодетекторов является возможность параллельного видеонаблюдения за зоной контроля.
Дата добавления: 2017-06-02; просмотров: 2612;