ВЛИЯНИЕ НА ВОЛНОВУЮ ХАРАКТЕРИСТИКУ ДЕФЕКТОВ РАБОЧЕГО ЗАЗОРА
Проведенный выше анализ волновых характеристик тракта воспроизведения сделан в предположении, что качество исполнения воспроизводящей головки идеально. В реальных магнитных головках возможны технологические огрехи исполнения рабочих зазоров, особенно в тех случаях, когда речь идет о головках с шириной рабочего зазора в единицы или доли микрон. Рассмотрим влияние неточности изготовления рабочего зазора на характеристики головок.
1. Непараллельность граней зазора. При таком дефекте в геометрии зазора (рис. 33) коэффициент щелевых потерь уменьшается:
|
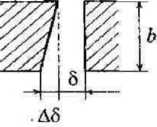 Рис. 33
Рис. 33
|
2. Скругление граней рабочего зазора (рис. 34). При таком дефекте зазора, наряду с изменением конфигурации поля над головкой (см. выше), наблюдается уменьшение коэффициента щелевых потерь. При этом эффект такой же, как будто зазор расширился до величины d + 0,2 pr. 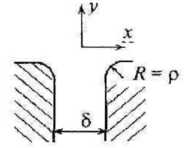
Рис 34
Лекция 4
КАЧЕСТВЕННЫЕ ПОКАЗАТЕЛИ МАГНИТОФОНОВ
ШУМЫ КАНАЛА ЗАПИСИ – ВОСПРОИЗВЕДЕНИЯ
Шумы такого типа – результат действия различных возмущений, как электромагнитных, так и механических, возникающих из-за несовершенства отдельных элементов канала и неидеальности их работы.
Шумы в канале записи-воспроизведения существенно отличаются от шумов канала связи. В каналах связи шумы аддитивные, т.е. линейно складываются с полезным сигналом. В магнитной записи такой шум тоже бывает, но в основном преобладают модуляционные шумы: Sвых= S0(1 + т).
Совершенно специфическими шумами канала записи-воспроизведения являются возникающая паразитная модуляция частоты и связанные с ней изменения временных соотношений в сигнале.
СТРУКТУРНЫЙ ШУМ
Причина возникновения структурного шума заключается в неоднородности частиц магнитного порошка и неравномерности его концентрации в рабочем слое магнитного носителя. Самый малый структурный шум – у размагниченной ленты (-55...-65 дБ относительно номинального уровня сигнала). Если размагниченную ленту подвергнуть действию поля подмагничивания, то, как показывает опыт, уровень структурного шума возрастает на 3... 10 дБ. Это шум паузы. Он ослабляется симметрированием формы тока подмагничивания, тщательным размагничиванием сердечника головки и элементов лентопротяжного механизма, с которыми соприкасается лента.
Структурный шум имеет нормальное распределение и низкочастотный энергетический спектр. Относительный уровень структурного шума зависит от ширины дорожки. Если ее увеличить в n раз, то уровень полезного сигнала (в силу его когерентности) тоже увеличится в n раз, тогда как случайный шум увеличится  раз. Однако этим способом снижения структурного шума пользуются очень редко. Во-первых, увеличение длины рабочего зазора головки ужесточает требования к качеству её установки, а, во-вторых, снижение структурного шума на 3 дБ ценой двойного увеличения расхода магнитной ленты устраивает далеко не всех пользователей.
раз. Однако этим способом снижения структурного шума пользуются очень редко. Во-первых, увеличение длины рабочего зазора головки ужесточает требования к качеству её установки, а, во-вторых, снижение структурного шума на 3 дБ ценой двойного увеличения расхода магнитной ленты устраивает далеко не всех пользователей.
ФЛУКТУАЦИИ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ТРАКТА
Такие флуктуации порождают чисто модуляционные шумы. К этим флуктуациям относятся: флуктуации неконтакта; непостоянство толщины рабочего слоя; изменяющиеся во времени перекосы ленты и т.п.
Контактный шум записи возникает из-за колебаний неконтакта "а". Он минимален при токе подмагничивания примерно на 20% выше оптимального. В этом случае при увеличении неконтакта уровень подмагничивания снижается, приближаясь к оптимальному, отчего несколько повышается уровень записываемого сигнала.
Контактный шум воспроизведения – в чистом виде модуляционный шум. Он является преобладающим среди шумов тракта воспроизведения.
Непостоянство толщины рабочего слоя носителя приводит к изменению коэффициента слойных потерь Кd и также порождает модуляционный шум, как правило, с очень низкочастотным энергетическим спектром
Изменяющиеся во времени перекосы магнитной ленты дают такой же эффект, как появление переменного по длине рабочего зазора неконтакта, либо неперпендикулярность зазора вектору движения ленты. И то и другое приводит к изменению амплитуды считываемого сигнала, т.е. к модуляционным шумам.
АДДИТИВНЫЕ ШУМЫ И ПОМЕХИ
Среди этих типов шумов и помех выделим главные:
- переходные помехи между дорожками. С целью экономии носителя и из желания разместить на нем большее число дорожек просветы между дорожками делают небольшими, что и приводит к таким помехам. При желании уровень этих помех может быть сведен к требуемому ценой уменьшения ширины магнитных дорожек либо их количества на ленте.
- копирэффект. При сматывании ленты в рулон рабочие слои соседних витков расположены на расстоянии 10...30 мкм, что определяется толщиной основы ленты. При длительном хранении возможно частичное намагничивание соседних слоев, особенно заметное при соседстве участков фонограммы с высоким и низким уровнем намагниченности. Копирэффект может достигать уровня -50...-58 дБ, что для высококлассной аппаратуры может быть неприемлемо. Максимум уровня копироффекта достигается на тех частотах, на которых выполняется условие:
λ = 2pdЛ
где λ длина записанной волны; dЛ – общая толщина ленты.
- собственные шумы головок у усилителей. Поскольку уровень сигнала записи в головке гораздо выше, чем сигнала воспроизведения, речь здесь может идти только о канале воспроизведения. Шумы такого типа подразделяются на несколько составляющих: собственные шумы сердечника и обмотки воспроизводящей головки, обусловленные тепловым движением электронов; собственные шумы транзисторов усилителя; тепловые шумы сопротивления базы транзистора. Меры борьбы с подобными шумами – применение в каскадах усилителей воспроизведения малошумящих активных элементов.
- внешние помехи и наводки. Самым активным компонентом этих шумов является сеть переменного тока. Главными их источниками являются силовые трансформаторы, дроссели фильтров питания и двигатели лентопротяжного механизма. Для борьбы с этими помехами используют как экранирование воспроизводящих головок двойными экранами (медь, пермаллой), так и рациональное размещение основных источников помех в корпусе магнитофона.
Подводя итог рассмотрению вопроса о шумах канала записи-воспроизведения, прежде всего следует отметить их многообразие и относительно высокий уровень. По этой причине, а также из-за относительно высокого уровня нелинейных искажений аналоговые устройства магнитной записи звука не могут иметь те высокие технические характеристики, которые предъявляются к современной аппаратуре записи-воспроизведения.
6, ЛЕНТОПРОТЯЖНЫЕ МЕХАНИЗМЫ
Основное назначение лентопротяжного механизма (ЛПМ) – транспортирование ленты с постоянной скоростью и ее перемотка.
К ЛПМ применяются следующие требования:
1. Постоянство скорости протягивания ленты относительно магнитных головок.
2. Обеспечение постоянного контакта ленты с головками.
3. Выдерживание с большой точностью перпендикулярности рабочих зазоров магнитных головок к вектору скорости движения магнитной ленты.
4. Ускоренная перемотка ленты в обоих направлениях.
5. Обеспечение постоянства натяжения ленты на обоих узлах (приемном и подающем).
По своей конструкции ЛПМ делятся на компланарные, коаксиальныеикольцевые.
В кольцевых ЛПМ, используемых в магнитной записи редко, лента движется по замкнутой петле, проходя мимо блока головок, а далее – по направляющим роликам кольцо замыкается. Такие устройства обычно используются там, где протяженность фонограммы незначительна и ее необходимо многократно воспроизводить.
Коаксиальные ЛПМ отличаются тем, что в них оба катушечных накопителя расположены один над другим, что экономит габариты ЛПМ. Однако такие ЛПМ также используются редко, так как, перемещаясь с верхнего накопителя в нижний, лента неизбежно претерпевает деформацию.
Наиболее распространенными являются компланарные ЛПМ, где оба накопителя расположены в одной плоскости и лента сматывается с подающей катушки на приемную, проходя через блок магнитных головок. При этом пленка не искривляется и не деформируется. Дорожки записи располагаются вдоль ленты (за исключением видеозаписи), и этих дорожек может быть много.
Схематично устройство компланарного ЛПМ показано на рис. 36.
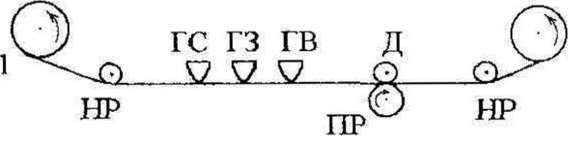 Рис. 36
Рис. 36
|
На рисунке обозначено: 1 – подающий магнитный накопитель (катушка); 2 – приемный магнитный накопитель; HP – направляющие ролики; ГС – головка стирания; ГЗ – головка записи; ГВ – головка воспроизведения; Д – вал двигателя, протягивающего пленку; ПР – прижимной ролик.
В профессиональных и высококлассных бытовых магнитофонах ЛПМ имеет три двигателя: один двигатель для протяжки ленты и по одному под каждым магнитным накопителем. Работает устройство в следующих режимах:
1 – режим записи,
2 – режим воспроизведения,
3 – режим перемотки (вперед либо назад).
В режиме записи работают две головки: головка стирания и головка записи. Двигатель Д вращается с постоянной скоростью и протягивает магнитную ленту, зажатую между валом двигателя и резиновым прижимным роликом. Усилиями двигателя Д лента сматывается с подающего узла; яри этом двигатель подающего узла работает в режиме подтормаживания, что обеспечивает необходимое усилие натяжения ленты, проходящей через блок магнитных головок. Возможно наличие специального устройства, мягко прижимающего ленту к блоку головок; этим же устройством осуществляется экранирование блока головок от нежелательных магнитных полей. Лента, прошедшая тяговый двигатель Д, подбирается двигателем приемного узла и наматывается на приемную катушку. В этом режиме оба двигателя приемного и передающего узлов запитываются небольшим напряжением, чтобы чрезмерными усилиями не порвать ленту, зажатую между валом тягового двигателя Д и резиновым роликом.
В режиме воспроизведения силовая часть ЛПМ работает точно так же, как и при записи. Отличие состоит лишь в том, что на головки записи и стирания сигналы не подаются, а работает только головка воспроизведения.
В режиме перемотки влево или вправо (вперед или назад) двигатель одного из магнитных накопителей включается на полное рабочее напряжение и наматывает с повышенной скоростью ленту на одну из катушек, в то время как другой двигатель работает в режиме слабого подтормаживания. При этом прижимной резиновый ролик отведен от вала тягового двигателя, а специальное устройство отводит ленту от блока магнитных головок во избежание истирания как ленты, так и головок.
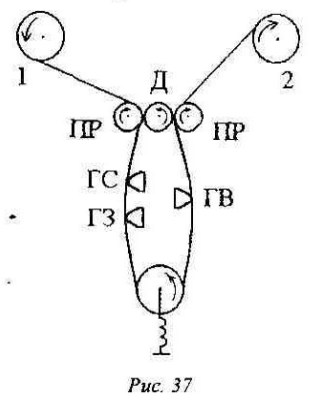
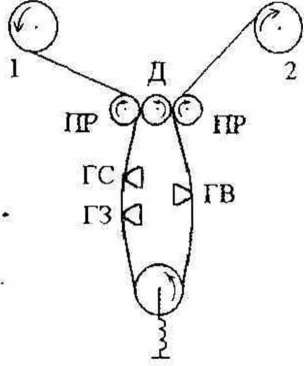
Рассмотренный ЛПМ называется механизмом типа открытой петли. Его отличительной особенностью, порождающей главный недостаток, является незащищенность блока головок от подающего узла, в результате чего по мере изменения радиуса намотки ленты на катушке подающего узла меняется сила натяжения ленты на участке блока магнитных головок. Отсюда и два главных недостатка механизма ЛПМ типа открытой петли: нестабильность силы натяжения ленты и нестабильность скорости протяжки ленты. От этих недостатков в значительной степени защищен механизм ЛПМ типа закрытой петли (рис. 37).
Отличительной особенностью схемы рис. 37 является то, что здесь имеются два прижимных ролика, плотно прижимающих ленту к валу двигателя с двух сторон, что позволяет оградить часть пленки, находящуюся в районе блока головок, от неравномерных усилий, приложенных к пленке со стороны магнитных накопителей. На рис. 37 виден обводной ролик ОР, который подпружинен некоторым усилием, определяющим натяжение ленты на магнитных головках. Это упрощенная схема, в действительности часто присутствуют еще специальные демпферные устройства, совмещающие в себе функции гасителей динамических перегрузок на ленту и датчиков натяжения.
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ В ЛПМ
|
В устройствах магнитной записи высокого качества к ЛПМ предъявляются жесткие требования, выполнение которых обеспечивает высокую достоверность воспроизведения записанной информации. К таким требованиям, прежде всего, относятся: стабильность скорости движения магнитной ленты и постоянство усилий, прилагаемых к ленте. Первое требование вызвано необходимостью точного воспроизведения спектрального состава записанною сигнала. Что касается стабилизации натяжения носителя, то при изменении усилий, растягивающих магнитную ленту, могут возникнуть две неприятности: изменится спектральный состав воспроизводимого сигнала, а при необратимых деформациях (растяжении) может быть нарушена и сама фонограмма. При этом даже на идеальном ЛПМ с такой ленты уже невозможно получить достоверного воспроизведения сигнала.
Исходя из сказанного выше, в ЛПМ чаше всего используют два типа систем автоматического регулирования:
1) система автоматического регулирования скорости движения магнитного носителя (САРС);
2) система стабилизации натяжения магнитного носителя (ССН).
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ МАГНИТНОЙ ЛЕНТЫ (САРС)
Подобные системы строятся по классической схеме систем стабилизации. При этом задающим воздействием является высокостабильный по частоте периодический сигнал. Информация о фактической скорости движения магнитного носителя может быть получена двумя способами. Первый способ – измерение частоты вращения вала двигателя, осуществляющего протяжку ленты. Это не очень точный способ, так как стабильность частоты вращения двигателя лишь приблизительно отражает стабильность скорости движения ленты. Это связано с тем, что между лентой и валом двигателя не исключаются хотя бы незначительные пробуксовки, несмотря на наличие прижимного резинового ролика. Тем не менее, для аудиомагнитофонов даже высокого класса такой способ измерения скорости движения ленты вполне приемлем, ибо небольшие (сотые доли процента) детонации при прослушивании аудиозаписи неощутимы на слух. В более точных аппаратах, например устройствах видеозаписи, такой способ совершенно неприемлем, так как точность захода траектории магнитной головки на наклонную магнитную дорожку записи должна составлять десятки микрон при протяжке через ЛПМ сотен метров ленты. В этом случае необходимо измерять фактическую скорость движения ленты, для чего на специальную магнитную дорожку, расположенную по краю ленты, при записи наносится синхронизирующий сигнал от высокостабильного генератора. Частота этого сигнала в процессе воспроизведения пропорциональна скорости движения ленты.
На рис. 38 показан вариант функциональной схемы статической системы стабилизации скорости вращения тягового двигателя ЛПМ магнитофона.
Объектом регулирования является двигатель Д, на который поступают напряжение питания U2 и возмущающее воздействие М, которое представляет собой реакцию нагрузки на вал двигателя. Тахогенератор ТГ находится на одном валу с двигателем и вырабатывает гармонический сигнал, частота которого пропорциональна скорости вращения тахогенератора, а следовательно и двигателя. Сигнал с тахогенератора подается на частотный детектор ЧД, где частота ω сравнивается с эталонной ω0. Сигнал ошибки ξ с выхода частотного детектора усиливается усилителем У и, суммируясь с напряжением питания двигателя U0, поступает на клеммы двигателя. Таким образом, замыкается обратная связь.
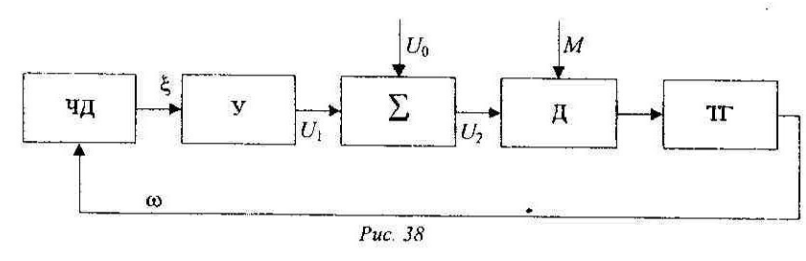
Обратная связь в системе должна быть отрицательная, чтобы система была устойчива и подавляла нестабильность питающего напряжения U0 и момента нагрузки М. Для этого полярность включения частотного детектора и усилителя выбираются так, чтобы уменьшение скорости вращения двигателя приводило к увеличению напряжения U1, в результате чего двигатель смог бы увеличить обороты.
Астатическая САРС
| Uo |
| η |
| тг |
| Ω |
Функциональная схема одного из вариантов астатической системы стабилизации скорости магнитного носителя показана на рис. 40.
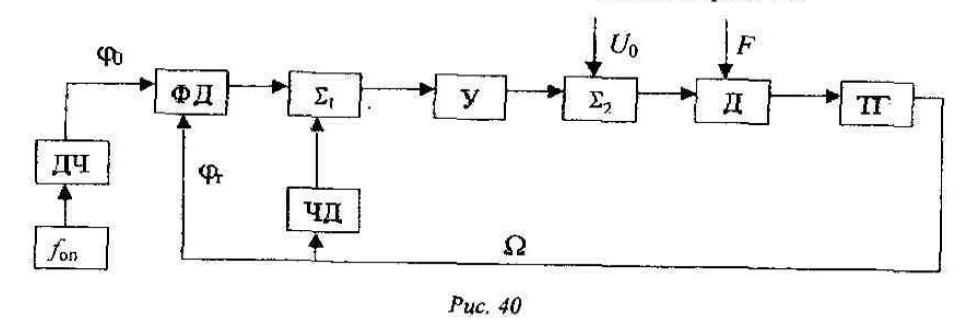
Сравнивая рис. 38 и 40, можно заметить, что у них много общего. Фактически в схеме рис.40 добавился еще один контур регулирования, замыкающийся через фазовый детектор ФД. Опорным сигналом для ФД является сигнал с высокостабильного генератора fоп, проходящий через делитель частоты ДЧ. Необходимость деления частоты fоп вызвана тем, что частота, вырабатываемая тахогенератором ТГ, сравнительно низкая, в то время как высокостабильный генератор, как правило, кварцованный, работает на высоких частотах.
Наличие второго контура регулирования позволяет повысить точность регулирования системы. В частности, можно свести точность слежения до постоянной фазы, что автоматически убирает ошибку по частоте. В этом случае ошибка регулирования на левом входе сумматора Σ1 будет. Именно она и формирует управляющее воздействие. В то же время сигнал на нижнем входе сумматора Σ1 может отсутствовать, так как частота Ω будет точно равна требуемой. Ошибка по фазе будет, а ошибки по частоте не будет. Разумеется, это касается статики или очень медленного изменения U0 и F.
СИСТЕМА СТАБИЛИЗАЦИИ НАТЯЖЕНИЯ МАГНИТНОЙ ЛЕНТЫ
По принципу устройства все системы стабилизации натяжения делятся:
- на системы с регулированием по возмущению;
- системы с регулированием по отклонению.
Функциональная схема системы с регулированием по возмущению показана на рис. 44. Она отличается отсутствием обратной связи. В основу регулирования положено то обстоятельство, что с изменением радиуса намотки ленты на катушке для сохранения усилия, приложенного со стороны подающего узла, напряжение питания подтормаживающего двигателя необходимо менять. Действительно, для сохранения неизменного усилия, приложенного к ленте, например при увеличении радиуса намотки, вращающий момент двигателя надо увеличивать. Это значит, необходимо увеличивать напряжение на клеммах двигателя.
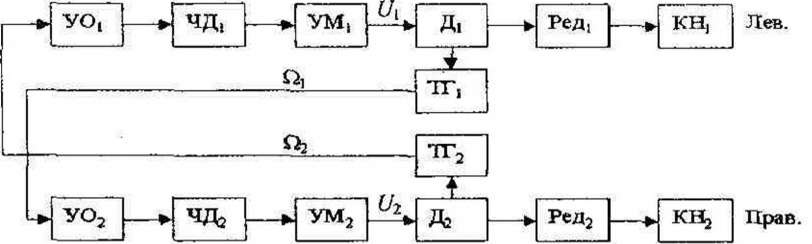 Рис. 44
Рис. 44
|
Измерение радиуса намотки ленты на магнитных накопителях – задача хоть в принципе и решаемая, но довольно сложная. Гораздо проще судить о радиусе намотки ленты по угловой скорости движения катушки. При постоянной и заранее известной линейной скорости движения ленты уменьшение радиуса намотки будет соответствовать увеличению угловой скорости катушки магнитного накопителя. Для измерения угловой скорости можно использовать уже упоминавшийся ранее тахогенератор.
На рис. 44 обозначено: Д1 Д2 – двигатели подающего и приемного узлов соответственно; ΤΓι и ТГ2 – тахогенераторы; Ред. – редуктор, понижающий угловую скорость; КН1 и КН2 – катушечные накопители левого и правого узлов соответственно; УМ – усилитель мощности; ЧД – частотный детектор; УО – усилитель-ограничитель.
Тахогенераторы формируют гармонические сигналы с частотой, пропорциональной частоте вращения двигателей. Усилитель-ограничитель преобразует гармонический сигнал в прямоугольный, так как частоты, генерируемые тахогенератором, очень низкие и на таких частотах большинство известных частотных детекторов работает с прямоугольными сигналами.
Устройство работает следующим образом: чем быстрее вращается Д2, тем медленнее вращается Д1, а это значит, что увеличение частоты Ω2 преобразуется в большее напряжение U1 и момент на валу двигателя Д1 будет возрастать, что и требуется. Недостатком системы рис. 44 является отсутствие обратной связи. Как всякая система без обратной связи, она не сможет отрабатывать возможные возмущающие воздействия, такие, как нестабильность питающих напряжений, трение в катушечных накопителях, нелинейность характеристик элементов схемы и т.п.
Более совершенной системой стабилизации напряжения магнитного носителя является система с обратной связью. В такой системе необходимо контролировать фактическое усилие натяжения ленты и в случае его изменения по каналу обратной связи вырабатывать воздействие на двигатель, направленное на уменьшение ошибки регулирования по натяжению. Функциональная схема системы стабилизации натяжения ленты построенной по принципу регулирования по отклонению, показанной на рис. 45.
 Рис. 45
Рис. 45
|
На сумматор системы Σ поступает сигнал X задающего воздействия и сигнал Y с датчика Д, характеризующий фактическое натяжение носителя. Разница между этими сигналами ξ (сигнал ошибки) усиливается усилителем и, складываясь с начальным напряжением питания двигателя U0 поступает на двигатель Дв данного катушечного накопителя КН (левого или правого). Изменение натяжение ленты фиксируется датчиком Д и по цепи обратной связи изменяет напряжение питания двигателя. Основным элементом данной системы, не встречающимся нам ранее, является датчик натяжения. Его можно выполнить самым различным способом. Проще всего использовать тензометрические датчики, которые наклеиваются на гибкую упругую пластину, на которой закреплен ролик с лентой. Пластина встроена в состав лентопротяжного механизма таким образом, что при изменении натяжения пластина изгибается в большей или меньшей степени, а тензодатчики, закрепленные на ней, изменяют свое сопротивление и могут быть использованы как датчики величины натяжения.
Лекция 5
ЦИФРОВЫЕ МАГНИТОФОНЫ
ОСНОВНЫЕ ПОЛОЖЕНИЯ
Потребность в разработке столь сложного и дорогого устройства, как цифровой магнитофон, возникла при попытке решить целый комплекс проблем, встающих перед разработчиками устройств аналоговой магнитной звукозаписи, а именно:
1) практическая невозможность получения равномерной амплитудно-частотной характеристики в диапазоне частот 20 Гц – 20 кГц, вызванная свойствами магнитных головок;
2) относительно высокий уровень шумов, свойственный системам аналоговой магнитной записи: -40¸ -70 дБ;
3) высокий уровень нелинейных искажений, порожденный нелинейностью кривой намагниченности ферромагнитных материалов:1¸5 %
4) недостаточно высокий динамический диапазон: 50¸60 дБ.
Несмотря на то что за многие десятилетия существования магнитной звукозаписи решались эти проблемы и даже значительно повысились качественные показатели систем магнитной записи, полностью справиться с этим не удавалось. При этом борьба за каждый дополнительный децибел или процент вела к несопоставимо высокому увеличению сложности, массы, габаритов и стоимости аппаратуры. Это не оставляло надежд получить в рамках приемлемых затрат даже профессиональную звукозаписывающую аппаратуру высочайшего качества, не говоря уже о бытовой.
Нужна была революция, новый подход к формированию магнитограммы, который позволил бы выйти на принципиально иной качественный уровень ценой приемлемых затрат. В сущностиподход былне таким уж и новым. К концу 60-х –началу 70-х годов XX в., когда начались разработки первых студийных цифровых магнитофонов, уже довольно много лет существовали и успешно работали периферийные устройства ЭЦВМ на магнитных носителях. Оставалось лишь решить ряд проблем, связанных с разработкой лентопротяжных механизмов и магнитных головок, способных обеспечивать запись и достоверное воспроизведение высокоскоростных цифровых потоков в рамках приемлемого расхода магнитной ленты в единицу времени. Разработка цифровых магнитофонов началась в начале 70-х годов XX в., и к началу XXI в. уже имелись не только профессиональные, но и бытовые цифровые магнитофоны как с неподвижными, так и с вращающимися головками.
Дата добавления: 2017-06-02; просмотров: 448;