Классификация и области применения датчиков
В основу классификации датчиков положены характерные признаки, по которым можно выделить следующие группы.
1. По измеряемой физической величине. Это самая обширная группа датчиков, т.к. в технических измерениях, в том числе при контроле и диагностировании, измерению подвергаются около 200 физических величин. Пример: датчики температуры, давления, перемещения, скорости, ускорения, усилия, расхода, уровня, вибрации и т.д. и т.п.
2. По принципу действия, на котором основано функционирование датчика:
а) термопреобразователи: термометры сопротивления (изменение сопротивления металлов Pt, Ni, Cu), термопары (термо ЭДС), полупроводниковые терморезисторы, датчики инфракрасного излучения и т.д.;
б) пьезоэлектрические преобразователи (вибраций, сил, давлений);
в) тензопреобразователи для измерений деформаций и механических напряжений;
г) фотоэлектрические (оптические) датчики (на фотодиодах, светодиодах, лазерах);
д) индуктивные, индукционные, датчики Холла;
е) механические датчики (индикаторные головки);
ж) электромеханические (тахометры, расходомеры);
з) потенциометрические (датчики угла поворота и перемещения);
и) емкостные (датчики перемещения, уровня, влажности, шероховатости);
к) контактные (тактильные): электроконтактные, виброконтактные - датчики положения, позиции на объекте измерения, контроля и диагностирования.
3. По выходному сигналу: аналоговые, цифровые (кодовые), импульсные.
4. По технологии изготовления:
а) традиционная технология: электромеханические датчики, электрические, электровакуумные и т.д.;
б) современная полупроводниковая микроэлектронная технология. Например, объемные кристаллы и пленочные, используемые в виде микросхем, которые напрямую стыкуются с цифровыми микросхемами для дальнейшей обработки сигнала - датчик Холла, гидисторы, термисторы.
В качестве примера применения современных датчиков рассмотрим подробнее измерительные и контрольные устройства, реализованные на базе датчиков Холла и датчиков давления.
Датчики Холла
Современная реализация датчиков Холла осуществляется на базе магнитоуправляемых интегральных логических микросхем серии К1116. Эти микросхемы представляют собой особый класс полупроводниковых приборов, принцип действия которых основан на изменении сигнала на их выходе при воздействии внешнего магнитного поля. Иначе говоря, эти микросхемы выполняют функции электронных ключей, управляемых магнитным полем.
Перспективность использования датчиков Холла в интегральном исполнении на основе магнитоуправляемых микросхем подтверждается тем, что они находят широкое применение в качестве чувствительных элементов в функционально-ориентированных магнитных датчиках электрического тока и напряжения, скорости и направления вращения, угла поворота и конечного положения исполнительных устройств, расхода жидкости и газа в ТП и т.д. Их также используют в бесконтактных (вентильных) электродвигателях, устройствах аварийной и охранной сигнализации, бесконтактных системах электронного зажигания горючей смеси в двигателях внутреннего сгорания, системах автостопа в бытовой радиоаппаратуре, в металлоискателях и дефектоскопах, в электронных предохранителях, в клавиатуре промышленных компьютеров и пультов управления ТОУ и т.д. и т.п.
Основные преимущества магнитоуправляемых микросхем (МУМС) по сравнению с другими преобразователями физических (неэлектрических) величин - простота обеспечения практически идеальных механической, электрической, тепловой и других видов развязки измерительных и управляющих цепей от объектов контроля, а также большой динамический диапазон и возможность непосредственного сопряжения со стандартными цифровыми микросхемами.
Микросхемы серии К1116 представляют собой устройства малой степени интеграции, содержащие в одном кремниевом кристалле преобразователь магнитного поля и электронное устройство усиления и обработки сигнала. Преобразователем магнитного поля служит интегральный 4-электродный элемент Холла, принцип действия которого основан на возникновении на двух продольных электродах ЭДС, прямо пропорциональной произведению напряженности магнитного поля на ток, протекающий через поперечные электроды. Микросхемы изготовляют по эпипланарной технологии и оформляют в 3–5 – выводном пластмассовом корпусе с жесткими плоскими выводами. Внешний вид и чертежи корпуса показаны на рис. 4.2. Штрихпунктирным квадратом на чертежах обозначено размещение зоны чувствительности элемента Холла (например, размеры зоны у микросхем К1116КП9 и К1116КП10 - 1,5´1,5 мм). Функциональная схема типовой микросхемы, позволяющая реализовать чувствительный элемент датчика Холла, представлена на рис. 4.3. По реакции на воздействие внешнего магнитного поля микросхемы подразделяют на униполярные, уровень напряжения на выходе которых зависит от значения индукции магнитного поля одной полярности, и биполярные, уровень выходного напряжения которых зависит как от значения индукции, так и от знака (полярности) воздействующего магнитного поля.
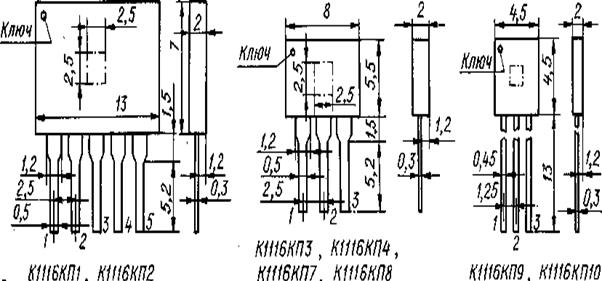
Рис. 4.2. Внешний вид корпусов микросхем серии К1116
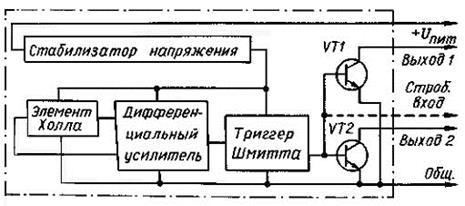
Рис. 4.3. Функциональная схема типовой микросхемы
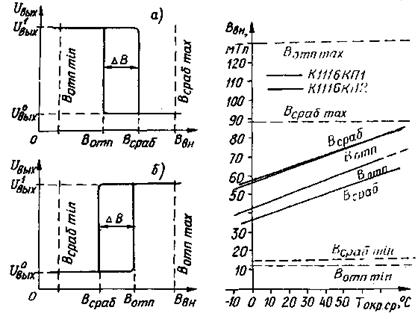
Униполярные микросхемы К1116КП1, К1116КП3, К1116КП9, К1116КП10 имеют прямой выход, сигнал на котором в отсутствие магнитного поля соответствует уровню логической «1» (рис. 4.4, а). При повышении индукции внешнего магнитного поля до значения в>всраб происходит переключение микросхемы и уровень сигнала на ее выходе скачком изменяется до логического «0». Униполярная микросхема К1116КП2 имеет инверсный выход, на котором уровень логической «1» появляется при воздействии магнитного поля с индукцией В>Всраб (рис. 4.4, б). Характеристика переключения для биполярных микросхем К1116КП4, К1116КП7 и К1116КП8 представлена на рис. 4.4, в.
С повышением температуры униполярных микросхем происходит увеличение значения индукции срабатывания/отпускания (рис. 4.4, г). С повышением температуры биполярных микросхем индукция срабатывания отпускания уменьшается. Температурный коэффициент изменения индукции срабатывания и отпускания лежит в пределах от 0,01 до 0,05 мТл/°С в зависимости от типа микросхемы.
Повышенная помехоустойчивость микросхем обеспечена наличием гистерезиса (с индукцией 3...9 мТл) на характеристике переключения.
Микросхемы серии К1116 рассчитаны на сопряжение с цифровыми интегральными микросхемами видов РТЛ, ДТЛ, ТТЛ, ЭСЛ, И2Л и структуры КМОП. Одна из возможных схем сопряжения показана на рис. 4.5.
Разработчику аппаратуры и устройств с МУМС следует учитывать, что воздействующее магнитное поле должно быть направлено перпендикулярно лицевой поверхности микросхем. Должны быть приняты меры защиты микросхемы от воздействия постороннего магнитного поля (напряженность которого превышает 1 мТл), а также от помех и пульсаций по цепи питания микросхем. Амплитудное значение пульсаций и паразитных сигналов в цепи питания не должно превышать 50 мВ.
|
| |
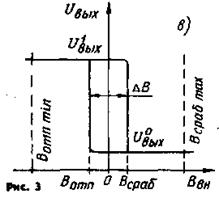
Рис.4.4. Характеристики микросхем серии К1116
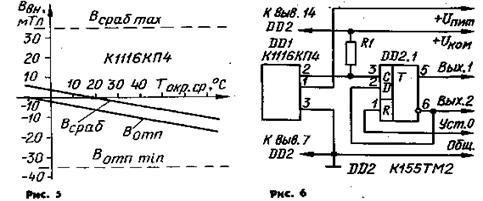
Рис.4.5. Схема сопряжения микросхем серии К1116 с ТТЛ – микросхемами
Микросхемы серии К1116 отличаются высокой надежностью (интенсивность отказов – не более 3×10-7 ч–1), продолжительным сроком службы (50000 ч) и невысокой стоимостью.
МУМС служат основным элементом магнитных датчиков (датчиков Холла), используемых в устройствах самого разнообразного назначения. В настоящее время наиболее широкое распространение получили универсальные магнитные датчики положения (позиции) и перемещения (рис.4.6, а, б). Конструкция датчиков может быть различной, но они всегда содержат преобразователь магнитного поля (в нашем случае - магнитоуправляемую микросхему на основе элемента Холла) и магнитную систему, разомкнутую или замкнутую. Магнитная система может быть составной частью датчика, а может включать в себя и те или иные элементы контролируемого объекта.
Простейший датчик состоит из МУМС и постоянного магнита, укрепленного на подвижном звене контролируемого объекта. При сближении магнита и МУМС на некоторое расстояние индукция магнитного поля становится достаточной для срабатывания микросхемы. Удаление магнита приводит к ее переключению в исходное состояние. При разработке датчиков учитывают известные закономерности действия магнитного поля, характеристики постоянных магнитов, а также влияние элементов конструкции на параметры датчиков.
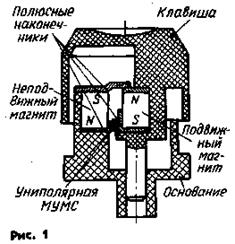
На рис. 4.6, а изображена конструкция клавишного модуля с беспружинным возвратом в исходное состояние. В исходном состоянии на выходе МУМС уровень либо «0», либо «1». При нажатии на клавишу подвижный магнит опускается, изменяется взаимное расположение полюсов магнитов и уменьшается значение магнитной индукции в зоне микросхемы. В крайнем нижнем положении магниты обращены один к другому одноименными полюсами. Магнитный поток, воздействующий на микросхему, становится минимальным и она переключается. При отпускании клавиши взаимодействие магнитных полей магнитов возвращает ее в исходное положение и фиксирует в нем. МУМС переключается в первоначальное состояние.
Бесконтактная клавиатура с применением МУМС обладает высокой надежностью, отсутствием дребезга контактов и высокой помехоустойчивостью.
Вариант конструкции датчика перемещения показан на рис. 4.6, б. При перемещении в рабочем зазоре датчика шторки из ферромагнитного материала, имеющей сквозные окна (отверстия), на выходе МУМС происходит смена уровней напряжения. Действие шторки основано на экранировании магнитного потока ферромагнитным материалом. Шторка может быть выполнена в виде стакана, пластины, диска, крыльчатки и т. п. Подобный датчик с вращающейся цилиндрической шторкой использован в бесконтактном прерывателе электронной системы зажигания двигателя автомобиля. Такой прерыватель имеет высокую надежность работы и долговечность. Датчик Холла с вращающейся крыльчаткой используется в тахометрических (турбинных) расходомерах технологических жидкостей с повышенными эксплуатационными свойствами.
Если на шторке расположить несколько рядов окон в порядке, соответствующем коду Грея, то с использованием соответствующего числа МУМС и магнитов можно реализовать 5-8-разрядный кодовый датчик линейного перемещения или датчик «частота вращения - код». В отличие от фотоэлектрического датчика магнитный не требует сложной оптической системы, более надежен и экономичен.
Широкое применение получило использование МУМС в качестве датчиков положения роторавентильных (бесколлекторных) электродвигателей. Устройство такого электродвигателя схематически представлено на рис. 4.7. Чаще всего датчик положения ротора представляет собой неподвижное кольцо из немагнитного материала, на котором равномерно по окружности установлены 2, 3 или 4 МУМС (в зависимости от числа секций обмотки возбуждения). Микросхемы попадают в зазоры вращающейся вместе с валом системы управляющих магнитов. Ротором электродвигателя служит многополюсный постоянный магнит, а многосекционная обмотка возбуждения играет роль статора. Вращающее магнитное поле обмоток возбуждения формируется бесконтактным коммутатором по командам датчика положения ротора. При этом одна микросхема управляет, как правило, одной из секций обмотки возбуждения.
Использование МУМС в датчике положения ротора обеспечивает возможность управления частотой вращения вентильных электродвигателей в очень широких пределах - от нескольких оборотов в минуту до 60 000. Такие двигатели весьма перспективны для прямого исполнительного привода электромеханических устройств автоматики ТОУ и компьютерной техники, так как обладают большим сроком службы (до 10000 ч), компактны и бесшумны; их КПД достигает 70 %.
С применением МУМС созданы бесконтактные электронные реле. Магнитная система и обмотка такого реле принципиально такие же, как и у обычного электромагнитного, но якорь и связанные с ним контакты отсутствуют. Их заменяют микросхема, установленная в зазоре магнитопровода, и транзисторный усилитель тока. Исполнительный узел реле, выполненный на мощных транзисторах или тиристорах, может быть рассчитан на большой коммутируемый ток (или напряжение). При этом размеры реле остаются относительно небольшими.
| |
а)
| |
б)
Рис.4.6. Датчики Холла положения (а) и перемещения (б) на основе МУМС
| |
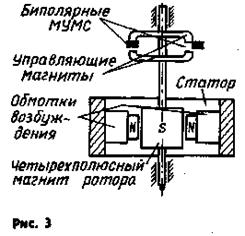
Рис.4.7. Устройство датчика положения ротора электродвигателя
| |
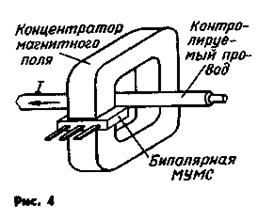
Рис.4.8. Применение датчика Холла в схеме защиты от токовых перегрузок
Аналогичные устройства могут быть использованы для электронной защиты цепей питания аппаратуры от перегрузки и замыканий. При необходимости защиты сильноточных цепей (до 1000 А) может быть использовано устройство, конструкция которого изображена на рис. 4.8. Вокруг провода контролируемой цепи располагают кольцевой концентратор, выполненный из трансформаторной стали. В зазор концентратора помещают МУМС. Превышение тока через контролируемый проводник сверх установленного порога приводит к переключению микросхемы и срабатыванию исполнительного устройства. Достоинствами таких релейных устройств являются полная развязка управляющих и исполнительных цепей, высокое быстродействие (десятые доли микросекунды) и искробезопасность.
Если на краю дверцы блока электроавтоматики ТОУ закрепить магнит, а в соответствующем месте на корпусе - МУМС, то можно реализовать защитное устройство, предотвращающее несанкционированное открываниеблока. Такое же устройство, смонтированное на микроволновой печи, не позволит включить ее при открытой дверце. Легко представить себе конструкции поплавковых датчиков уровня технологической жидкости с использованием МУМС.
Следует отметить, что МУМС могут быть использованы во многих случаях, в которых применяют герконы. Однако по сравнению с герконами магнитоуправляемые микросхемы обладают меньшими размерами, большей механической прочностью и устойчивостью, отсутствием дребезга контактов при переключении, высокими быстродействием (в 10 раз выше) и надежностью.
Интересные возможности предоставляет применение МУМС в дефектоскопии. Как пример, можно привести конструкцию головки для искателя оборванных проволок в канате. Эти приборы очень нужны горнякам, строителям, эксплуатационникам канатных дорог, лифтов, цеховых кранов, подъемников и т.д.
Дата добавления: 2017-01-13; просмотров: 3722;