Кинематика агрегатов
План лекции:
1. Основные понятия. Кинематические характеристики рабочего участка и агрегата.
Технология поворотов агрегата.
3. Способы движения агрегатов и их оценка.
Основные понятия. Кинематические характеристики рабочего участка и агрегата
Выполнение технологических операций мобильными машинно-тракторными агрегатами возможно только при их движении по полю.
Под кинематикой агрегата понимают его движение (с точки зрения геометрических форм) при выполнении сельскохозяйственных работ.
Различают рабочие ходы агрегата (преимущественно близкие к прямолинейным - когда выполняется технологическая операция) и холостые - повороты, заезды и переезды. Направление и форма движения агрегатов тесно связаны с формой и размерами рабочих участков. Сочетание размеров рабочих участков и форм движения агрегатов влияет на их производительность, качество технологической операции, удобство обслуживания и безопасность работы. В связи с этим существенное значение имеет подготовка поля для работы агрегатов и выбор способа их движения.
Закономерность циклично повторяющихся элементов движения называется способом движения.
Часть или все поле севооборота, находящееся в одном массиве и отведенное для выполнения определенной сельскохозяйственной работы, как правило, несколькими агрегатами, называется рабочим участком. Длина и ширина рабочего участка обозначается Lуч и Суч (рисунок 8.1)
В зависимости от размеров рабочего участка и избранного способа движения он разбивается на загоны (шириной С) или обрабатывается как одно целое. Если нет возможности совершать повороты за пределами рабочего участка, с двух сторон его (возможно и со всех сторон) отделяют поворотные полосы шириной Е. Граница поворотной полосы, на которой производится включение и выключение сельскохозяйственных машин в работу и из нее, называется контрольной линией. Расстояние между контрольными линиями и определяет длину рабочего хода агрегата Lр.
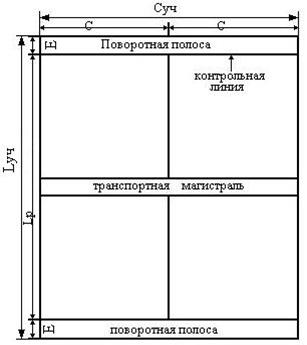
Рисунок 8.1 – Схема рабочего участка, подготовленного
к выполнению работы
При необходимости на рабочем участке выделяется одна или несколько транспортных магистралей для движения технологического транспорта.
Таким образом, кинематическими характеристиками загона являются его ширина С, ширина поворотной полосы Е и длина рабочего хода агрегата Lр. Они связаны со способом движения и составом агрегата (точнее, его кинематическими характеристиками).
Для характеристики агрегата с точки зрения кинематики используют некоторые условные понятия и обозначения. Прежде всего, выбирается центр агрегата - такая точка, зная траекторию которой, можно определить траекторию любых других точек. В качестве центра агрегата (ц.а.) условно принимают: а) для агрегатов с колесными тракторами и самоходных машин с одной ведущей осью - проекцию середины ведущей оси на плоскость движения; б) для агрегатов с гусеничными тракторами - проекцию точки пересечения продольной оси трактора с вертикальной плоскостью, проведенной через середины опорных ветвей гусениц; в) для агрегатов с колесными тракторами по схеме 4х4 - проекцию середины прямой, соединяющей середины ведущих колес; г)для агрегатов с колесными тракторами, имеющими шарнирно-сочлененную раму - проекцию центра шарнира.
Другие наиболее существенные кинематические характеристики агрегата представлены на рисунке 8.2. Кинематическая длина агрегата Lк - расстояние от центра агрегата до линии расположения наиболее удаленного рабочего органа при прямолинейном движении. Кинематическая ширина агрегата dк - расстояние от продольной оси агрегата (всегда проходит через центр агрегата) до наиболее удаленной от оси вправо и влево точки агрегата, движущейся по полю.
Для прицепных машин выделяют ведомую точку - центр прицепного звена (ц.п.з.) - основание перпендикуляра из точки прицепа на проекцию оси колес прицепной машины. Сам трактор имеет присущие ему кинематические характеристики - продольную базу L, ширину колеи Вк и максимальные углы поворота направляющих колес αmax.
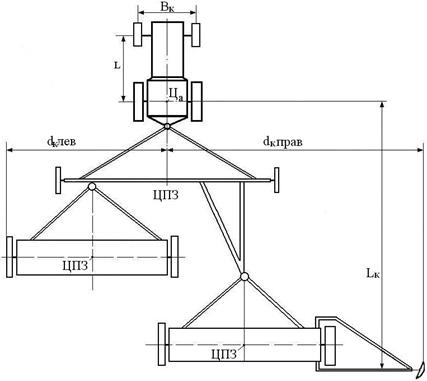
Рисунок 8.2 – Кинематические характеристики агрегата
Точка, относительно которой в данный момент совершается поворот центра агрегата, называется центром поворота агрегата (ц.п.), а расстояние между центром поворота и центром агрегата - радиусом поворота ρ.
С точки зрения кинематики важен минимально-допускаемый радиус поворота агрегата по условиям качества выполнения технологической операции, безопасности работы, качения всех колес агрегата, отсутствия опасных сближений звеньев агрегата и др. Этот минимально допускаемый радиус поворота устанавливают опытным путем при постепенном уменьшении радиуса поворота реального агрегата, движущегося по свертывающейся спирали, а также путем графических построений.
Для приближенных практических расчетов агрегатов с навесными машинами минимальный радиус поворота агрегата принимают равным наименьшему конструктивному радиусу поворота трактора. Для широкозахватных агрегатов из прицепных машин радиус поворота агрегата считают равным ширине захвата его.
В процессе движения агрегат характеризует поворотливость, устойчивость и управляемость (все это показатели маневренности агрегата).
Агрегат, особенно с колесным трактором, не может мгновенно перейти от прямолинейного движения (ρ=∞) на поворот по дуге окружности с достаточно малым ρ, на это требуется какое-то время. В течение этого времени агрегат движется по траектории с переменным радиусом кривизны от ρ=∞ ρ (само движение называют «входом в поворот», аналогично будет и «выход из поворота»). Способность агрегата переходить с прямолинейного движения на криволинейное (с определенным радиусом ρ) и обратно называется поворотливостью. Показатель поворотливости Кп=S·ρ, где S - длина пути на «входе в поворот». Агрегаты с гусеничным трактором обычно имеют Кп значительно меньшее, чем у агрегатов с колесными трактором. Для агрегатов с колесным трактором показатель поворотливости Кп пропорционален соотношению линейной скорости агрегата и угловой скорости поворота направляющих колес.
Устойчивость движения агрегата - способность его сохранять установившееся направление движения. Она тесно связана с устойчивостью машин, стабилизирующим действием рабочих машин и др. Движение прицепной рабочей машины практически всегда устойчиво, однако сам по себе трактор часто неустойчив и в целом агрегат не может двигаться строго прямолинейно.
Силы сопротивления, приложенные к передней части ведущей машины, стремятся нарушить устойчивость движения. Если точка прицепа находится сзади ведущих колес, то сила сопротивления прицепной машины стабилизирует движение агрегата, стабилизирующее действие оказывает и включение привода передних колес.
Управляемость агрегата - способность его выводиться из установившегося направления движения на другое, заданное управляющим воздействием.
Дата добавления: 2017-01-13; просмотров: 5673;