Классификация типов электроприводов
1.4.1. По роду тока
Электропривод постоянного и переменного тока. В настоящее время наблюдается тенденция перехода к приводу переменного тока (асинхронному). Связано это с рядом факторов: меньшая стоимость вследствие простоты конструкции, возможность получения лучшей динамики. Основной недостаток – бо’льшая сложность математического описания и законов управления.
1.4.2. По способу распределения механической энергии
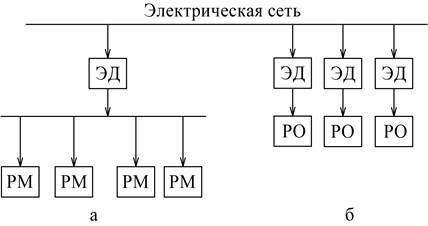
1) Групповой ЭП обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и её распределение между ними производится с помощью одной или нескольких трансмиссий. В настоящее время практически не применяется ввиду технического несовершенства. Уступил место индивидуальному и взаимосвязанному приводам.
|
| Рис. 1.2. Структурные схемы группового (а) и индивидуального (б) электропривода |
2) Индивидуальный привод по сравнению с групповым обладает рядом преимуществ:
производственные помещения не загромождаются тяжелыми трансмиссиями и передаточными устройствами; улучшаются условия работы и повышается производительность труда вследствие облегчения управления отдельными механизмами. Индивидуальный электропривод отличается более лучшими энергетическими показателями. Значительно упрощаются механические передачи, повышается точность работы привода. При использовании индивидуального ЭП создаются наиболее благоприятные условия для автоматизации работы машин и технологических процессов. Такой ЭП широко применяется в сложных металлорежущих станках, прокатных станах, экскаваторах, подъемно-транспортных машинах, роботах и др.
3) Взаимосвязанный ЭП имеет два или несколько электрически или механически связанных между собой двигателей. Примером взаимосвязанного ЭП может служить привод цепного конвейера большой протяженности. Исполнительным органом такого конвейера служит цепь, приводимая в движение несколькими двигателями, установленными по длине конвейера. Взаимосвязанный ЭП широко применяется в транспортных установках, бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д. Одной из разновидностей взаимосвязанного ЭП является многодвигательный привод – это электропривод, в котором несколько двигателей работают на общий вал.
По виду движения различают реверсивный и нереверсивный ЭП поступательного либо вращательного движения.
1.4.3. По степени управляемости
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной скоростью, параметры привода меняются только в результате возмущающих воздействий;
2) регулируемый - скорость рабочего органа может изменяться в указанных пределах, параметры привода могут меняться под воздействием управляющего устройства;
3) программно-управляемый – скорость вращения изменяется согласно некоторой программе;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
1.4.4. По роду передаточного устройства
1) Редукторный, в котором электродвигатель передает вращательное движение рабочему органу машины через редуктор
2) Безредукторный – передача движения осуществляется непосредственно к рабочему органу, либо через передаточное устройство, не содержащее редуктор.
1.4.5. По уровню автоматизации
1) Неавтоматизированный. Управление осуществляется в ручную. Применяется в установках малой мощности, бытовой и медицинской технике.
2) Автоматизированный. Регулирование параметров происходит автоматически, управляющие команды задаются вручную.
3) Автоматический. Управляющие воздействия вырабатываются автоматически, без участия оператора.
Дата добавления: 2016-12-26; просмотров: 1123;