Релейные исполнительные механизмы.
В системах автоматики широко применяются элементы и устройства дискретного принципа действия. Среди этих устройств одной из самых больших групп являются реле. В системах управления и регулирования энергетических электрических и энергомеханических потоков энергии релейные элементы применяются не только как промежуточные и усилительные устройства автоматики, а также они часто используются как оконечные выходные элементы этих систем.
В этом случае релейные элементы выполняют функции исполнительных механизмов и называются релейными исполнительными механизмами (РИМ)
Реле - это устройство, которое автоматически осуществляет скачкообразное переключение выходного сигнала под воздействием управляющего сигнала, изменяющегося непрерывно в определенных пределах.
Реле- это промежуточный элемент, который приводит в действие одну или несколько управляемых электрических цепей при воздействии на реле определенных электрических сигналов управляющей цепи.
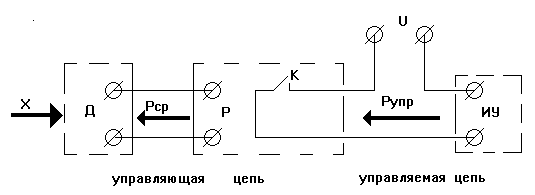 Структура РИМ:
Структура РИМ:
РИМ представляет собой совокупность электромагнита, который исполняет роль управляющего устройства, и перемещаемой им механической нагрузки. Нагрузкой при этом могут быть, например, разрывные контакты (в электромагнитных реле), реакция потока газа или жидкости (в электромагнитных клапанах), регулирующий орган (задвижка или заслонка) вместе с соответствующими возвратными пружинами, противодействующими тяговым усилиям электромагнита. Следовательно, РИМ в системах автоматики могут выполнять самые разнообразные функциональные задачи.
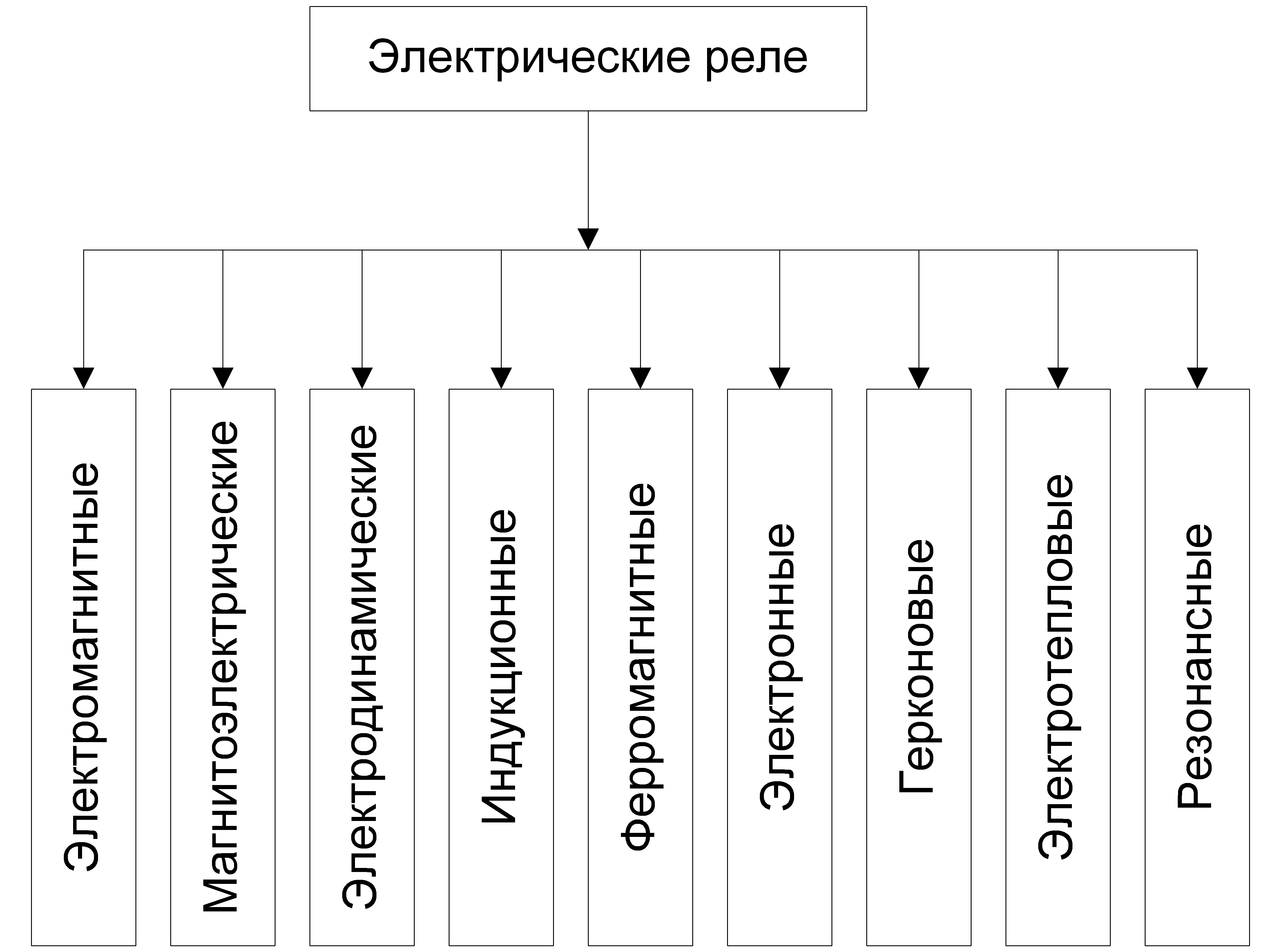
Классификация электрических реле по принципу действия:
Основные параметры, характеризующие работу реле:
1) Мощность срабатывания:Рср (Вт) - это минимальная электрическая мощность, которая должна быть подведена к реле от управляющей цепи для его надежного срабатывания, т.е. приведения в действие управляющей цепи.
2) Мощность управления:Рупр. (Вт) -это максимальная величина электрической мощности в управляемой цепи ,при которой контакты реле еще работают надежно. Рупр. определяется параметрами контактов реле, переключающих управляемую цепь.
3) Допустимая резервная мощность:Рр (Вт) - мощность, разрываемая контактами при определенном токе или напряжении без образования устойчивой электрической дуги при данном напряжении.
4) Коэффициент управления: Купр- это величина характеризующая соотношение Рупр к Рср реле.
5) Время срабатывания:Tср (сек) - интервал времени от момента поступления сигнала из управляющей цепи до момента начала воздействия реле на управляемую цепь. Допустимая величина tср определяется необходимой быстротой передачи сигнала в управляемую цепь.
6) Электромагнитное тяговое усилие(сила притяжения якоря к катушке реле) прямо пропорционально квадрату МДС (т. е. оно не зависит от направления тока в управляющей обмотке) и обратно пропорционально квадрату длины δ воздушного зазора.
2. Цифровые и информационно-цифровые датчики
Цифровые датчики генерируют дискретные выходные сигналы, импульсные последовательности или представленные в определенном коде данные, которые непосредственно могут быть считаны процессором. В зависимости от типа датчика выходной сигнал либо сразу формируется в цифровом виде (например, от датчика положения вала), либо должен обрабатываться цепями электронной логики, которые обычно составляют с ним одно целое. Измерительная головка цифрового датчика такая же, как и у аналогового. Существуют интегрированные цифровые датчики, которые включают микропроцессоры для выполнения числовых преобразований и согласования сигнала и вырабатывают цифровой или выходной сигнал.
Если выходной сигнал датчика представляет собой последовательность импульсов, то они обычно суммируются счетчиком. В другом варианте — можно измерять интервал между импульсами. Затем результат в виде цифрового слова передается на дальнейшую обработку. При измерении энергии информация обычно кодируется импульсами - каждый импульс соответствует определенному количеству энергии.
Информационно-цифровые датчики (Fieldbus sensor) дополнительно обеспечивают передачу информации через шины локального управления (Field bus) которые представляют собой специальный тип двухсторонних цифровых коммуникаторов. Датчики данного типа - это обычные датчики температуры, давления, расхода и т. д., которые дополнительно имеют микропроцессор для обработки данных и преобразования их в цифровой вид (например, в 12-разрядный код) и поддержки внешних коммуникаций. По шине можно передавать не только результаты измерений, но и идентификационную информацию датчика. Иногда такие датчики поддерживают режим удаленного тестирования и калибровки.
Практическая задача: Рассчитать основные характеристики идеального интегрирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена.
Передаточная функция:
k - коэффициентом передачи звена.
постоянная времени (в сек.)
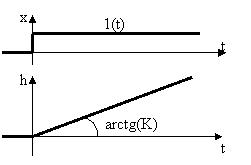
Переходная функция: h(t)=K·t
Ее значение линейно нарастает во времени (теоретически до бесконечности). Скорость нарастания переходной функции равна коэффициенту К.
|
КЧХ:
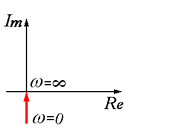
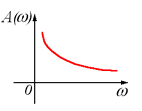
АЧХ:
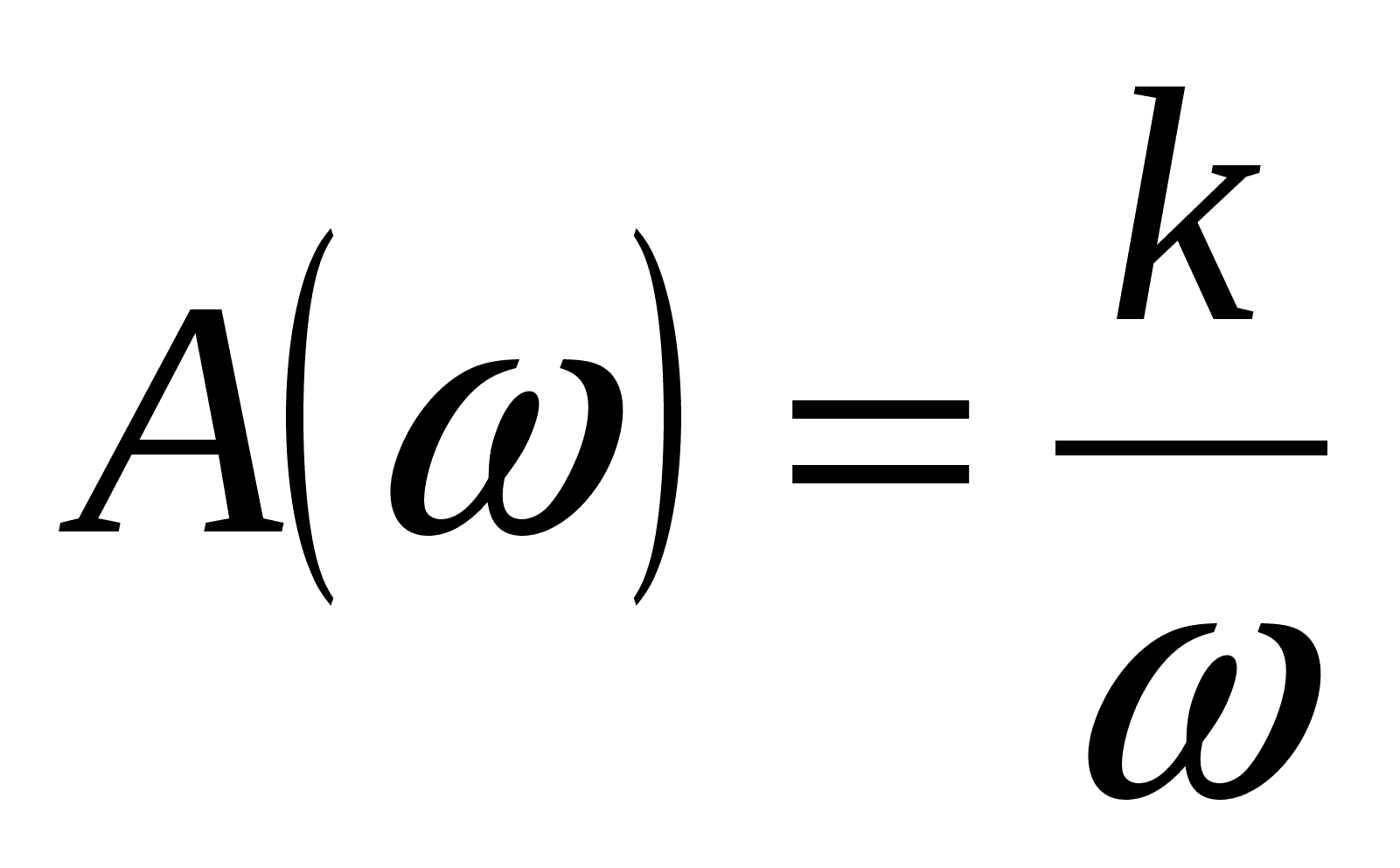
АЧХ представляет собой гиперболу, которая при  стремится к бесконечности.
стремится к бесконечности.
ФЧХ:
показывает, что сдвиг фаз, создаваемый звеном, на всех частотах одинаков и равен -900.
| <== предыдущая лекция | | | следующая лекция ==> |
| Общие сведения об одноковшовых экскаваторах | | | Классификация дробильного и помольного оборудования |
Дата добавления: 2016-05-11; просмотров: 3716;