Структура механических систем
Базисными элементами механических систем являются детали. Деталь – это часть изделия, не содержащая соединений. Между собой детали могут быть соединены подвижно или неподвижно(таблица 1).
Таблица 1 – Подвижные и неподвижные соединения
| Неподвижные соединения | Подвижные (кинематические) соединения | |||
| W=0 | Одноподвижные (W=1) | Двухподвижные (W=2) | ||
| 


| 
| 
| 
|
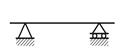
| вращательная пара (шарнир) | поступательная пара | двух- точечная (центроид-ная пара) | высшая пара |
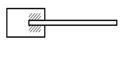
Неподвижные соединения (или просто соединения) деталей делятся на неразъемные (сварное, заклепочное, паянное, клеевое) и разъемные (обычно резьбовые). В расчетных схемах конструкций неподвижное соединение детали со стойкой называют заделкой. В теории механизмов и машин (ТММ) деталь или совокупность деталей, жестко связанных между собой и совершающих общее движение, называют звеном.
Подвижные соединения звеньев в ТММ называютсякинематическими соединениями.Понятие «кинематическое соединение» применимо и по отношению к деталям. Кинематическое соединение между двумя звеньями (или двумя деталями), не содержащее промежуточных элементов, называется кинематической парой.
Кинематические соединения (в том числе кинематические пары) различаются по числу S связей, накладываемых данным соединением, или числу W(W = 6 – S), оставшихся степеней свободы относительного движения двух соответствующих звеньев (деталей). В плоских механических системах встречаются только одноподвижные (W = 1, S = 5) кинематические пары, их называют также парами 5-го класса, и двухподвижные(W = 2, S = 4) кинематические пары, их называют парами 4-го класса. Одноподвижные пары (соединения) плоских систем обычно бывают двух видов – вращательные и поступательные (таблица 1). Вращательная и поступательная пары характеризуются контактом тел по поверхности и называются низшими. Двухподвижные пары плоских систем являются высшими, так как в них контакт тел локализован (происходит по линии).
Число степеней свободы W в относительном движении звеньев всей плоской механической системы определяется по формуле Чебышева:
W = 3·n – 2Р5 – Р4,
где n – число подвижных звеньев (или деталей, которые на данном этапе структурного анализа рассматриваются как отдельные звенья);
Р5 – число кинематических соединений (пар) 5-го класса;
Р4 – число кинематических соединений (пар) 4-го класса.
Механические системы, характеризующиеся общей величиной W  0, называются фермами, асистемы, для которых общая величина W > 0 – это различные механизмы.
0, называются фермами, асистемы, для которых общая величина W > 0 – это различные механизмы.
Схематические изображения некоторых механических систем показаны на рисунке 1. Проанализируем их структуру. Для этого вначале найдем и обозначим латинскими буквами соединения деталей, допускающие их относительную подвижность. Сами детали (звенья), образующие между собой подвижные соединения, обозначим цифрами. Заведомо неподвижная деталь (звено), называемая стойкой, считается нулевым элементом системы. На схемах стойка обычно отмечается подштриховкой.
Рассмотрим механическую систему (рисунок 1 а). Она содержит две детали (помимо стойки), образующих между собой и со стойкой три подвижные (кинематические) соединения: А (0-1) вращательная 5 кл.; В (2-1) вращательная 5 кл.; С (0-2) вращательная 5 кл.; W = 3n – 2Р5 – Р4 = 3∙2 – 2∙3 – 0 = 0. Это, так называемая, статически определимая ферма.
Механическая система, показанная на рисунке 1 в, также является неподвижной и статически определимой: А (0-1) вращательная 5 кл.; В (0-1) 4 кл.; W = 3∙1–2∙1–1∙1=0.
Система (рисунок 1 б) содержит пять кинематических соединений 5-го класса: А (0-1); В (0-2); С (0-3); D (1-2); D1(3-2) и три детали (кроме стойки), входящие в эти соединения. Для нее W = 3∙3 – 2∙5 – 0 = – 1. Системы с числом W < 0 называют статически неопределимыми фермами.
На рисунке 1 г показана система, которая является механизмом. Она содержит три подвижных звена и четыре кинематических пары 5 кл.: А (0-1, вращательная); В (1-2, вращательная); С (2-3, вращательная); D (3-0, поступательная). По формуле Чебышева получаем: W = 3∙3 – 2∙4 – 0 = 1. Таким образом, система является механизмом с одной степенью свободы. Стрелкой показано направление движения ведущего звена 1.
Система (рисунок 1 д) содержит два подвижных звена, две кинематические пары 5-го класса: А (0-1, вращательная), В (0-2, поступательная) и одну пару 4-го класса – С (0-3, высшая). W = 3∙2 – 2∙2 – 1 = 1, следовательно это тоже механизм с одной степенью свободы.
Система (рисунок 1 е) включает три подвижных звена, три вращательные кинематические пары 5-го класса: А (0-1), В (0-2), С (2-3) и одну высшую пару 4-го класса D (0-3). W = 3∙3 – 2∙3 – 1 = 2. Формально, данный механизм имеет две степени свободы, однако, одна их них является «лишней», так как вращение ролика 3 вокруг своей оси не влияет на положение и движение других звеньев. Можно перейти к эквивалентной схеме (рисунок 1 ж): W = 3∙2 – 2∙2 – 1 = 1.
Механическая система, показанная на рисунке 1 з, содержит семь подвижных деталей, обозначенных цифрами, и десять вращательных кинематических пар 5-го класса. В точках С, D, Е присутствуют по две пары (С 2-5; С1 6-5; D 4-5; D1 7-5; Е 3-6; Е1 7-6) W = 3∙7 – 2∙10 – 0 = 1, таким образом – это механизм. Замечаем, что детали 5, 6, 7 неподвижны друг относительно друга и образуют единое звено. С точки зрения теории механизмов более корректно перейти к эквивалентной схеме (рисунок 1 и), содержащей пять звеньев и семь пар 5-го класса: W = 3∙5 – 2∙7 – 0 = 1.
На рисунке 1 к изображен простейший зубчатый механизм. Он включает два подвижных звена (зубчатых колеса) и стойку. Кинематические пары А (0-1) и В (0-2) вращательные 5 кл., а пара С (2-1) высшая 4 кл.: W = 3∙2 – 2∙2 – 1 = 1.
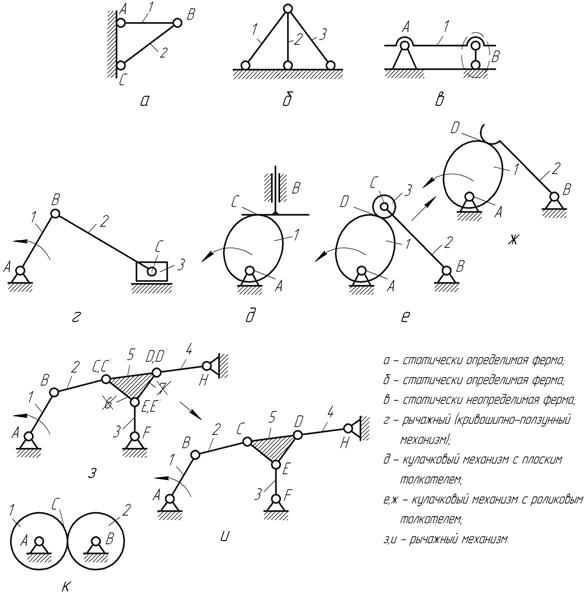
а, в – статически определимые фермы; б – статически неопределимая ферма; г – рычажный (кривошипно-ползунный) механизм; д – кулачковый механизм с плоским толкателем; е – кулачковый механизм с роликовым толкателем; ж – эквивалентный ему кулачковый механизм без ролика; з, и – рычажный механизм; к – зубчатый механизм (зубчатая передача)
Рисунок 1 – Примеры структурных схем механических систем
Задание 1
Выполнить структурный анализ двух механических систем, показанных на рисунке 2 под номерами, соответствующими последней и предпоследней цифрам шифра по зачетной книжке. Для этого:
1) обозначить цифрами детали (звенья) подвижно соединенные между собой;
2) обозначить латинскими буквами кинематические соединения (кинематические пары), образуемые этими деталями (звеньями);
3) определить по формуле Чебышева число W рассматриваемой системы;
4) ответить на вопрос: «Является ли данная система механизмом, статически определимой фермой или статически неопределимой фермой?»
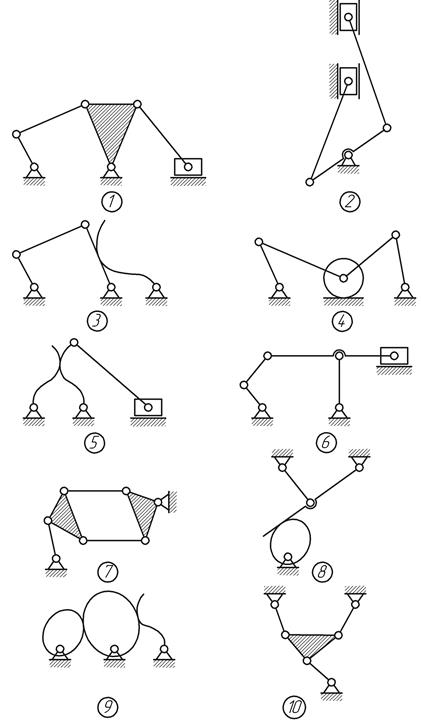
Рисунок 2 – Схемы механических систем к заданию 1
Дата добавления: 2016-08-07; просмотров: 1321;