Адаптивные системы управления, их особенности.
Задачи, ставящиеся перед самонастраивающимися, или адаптивными, системами управления, значительно сложнее и разнообразнее, чем задачи, решаемые системами автоматического управления.
Первой задачей является поддержание экстремума управляемой величины. Для этой цели на объект подаются пробные воздействия со стороны управления (δu), анализируется знак изменения управляемой величины (у) и производится управляющее воздействие, приближающее режим к точке экстремума. Таким образом, система управления автоматически поддерживает режим, близкий к оптимальному при котором  .
.
Устройства, обеспечивающие режим работы управляемого объекта, близкий к оптимальному, называются автоматическими оптимизаторами, или экстремальными регуляторами. 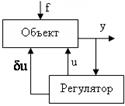
Такие системы применяются для объектов, имеющих экстремальные характеристики и существенные, но медленно меняющиеся факторы, приводящие к изменению экстремальных характеристик. При этом можно считать, что за время прихода к экстремуму характеристика управления объектом не изменится.
Второй задачей самонастройки (или адаптации) является поддержание оптимальной работы системы регулирования по условию максимального ее быстродействия. В этом случае показателем экстремума является время, в течение которого система приходит в соответствие с изменением задающего воздействия.
Это время может анализироваться с помощью специального устройства самонастройки (адаптации), изменяющего параметры регулятора, чтобы время регулирования стало минимальным.
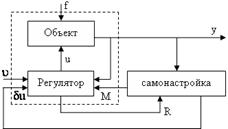
Воздействие, изменяющее параметры регулятора-М. Определение времени регулирования производится с помощью изменений задающего воздействия  .
.
Объект вместе с регулятором можно рассматривать как объект экстремального управления более высокой категории, управляемый устройством самонастройки. Показатель качества в переходных процессов в системе регулирования, вычисляемый в устройстве самонастройки на основании вводимых в ней величин y и R, а также вырабатываемых изменений управляющих воздействий , является управляемой величиной, а некоторый настраиваемый параметр регулятора М – управляющей. Таким образом, рассматриваемая система может быть представлена в виде двух систем, из которых одна управляет другой. Поскольку самонастраивающиеся системы имеют двойственное значение, т.к. сочетают изучение объекта и управления им они называются устройствами дуального---- управления.
Самонастраивающиеся АС получили небольшое распространение из-за их сложности. Однако быстрое развитие принципов построения надежных вычислительных устройств, моделей для запоминания и преобразования сигналов, а также применяющие ЦВМ для задач управления и выпуск специальных управляющих машин открывают широкие перспективы для построения адаптивных или самонастраивающихся систем.
Имеются также адаптивные системы обучающиеся, которые пополнят необходимую для управления информацию в процессе обучения. Как правило обучение сводится к корректировке алгоритма системы человеком или специальным автоматическим устройством по заранее известному закону оптимальной работы системы в текущей ситуации.
Адаптивные системы с настраиваемой моделью реализуют оптимальные управляющие воздействия, используя динамическую модель объекта управления, подстраиваемую к изменяющимся характеристикам объекта.
Как правило, задачи создания адаптивных систем по постановке близки к задачам оптимального управления.
Также требуется отыскать управляющие воздействия или алгоритмы управления, которые доставляют экстремальное значение какому-либо критерию, характеризующему степень достижения системой поставленной цели.
3. Изделие (система) состоит из пяти последовательных блоков, надежности которых равны:
pa1=0.80;
pa2=0,90;
pa3=0,90;
pa4=0,90;
pa5=0,80.
Требуется определить вероятность безотказной работы:
Дата добавления: 2016-05-05; просмотров: 2048;