Применение имитационного моделирования при проектировании
Имитационное моделирование представляет собой метод исследования проектируемой системы, заключающейся в имитации на ЭВМ процесса ее функционирования. ИМ реализуется программным алгоритмом процесса функционирования системы с учетом выбранного уровня детализации и его испытаний для получения нужных характеристик. Под ИМ понимается процесс конструирования модели реальной системы и постановки экспериментов этой модели с целью изучения ее поведения либо оценки в рамках ограничений, стратегий обеспечивающих функционирование системы.
Процесс имитации включает в себя большое число операций, связанных с формированием, преобразованием и использованием реализации случайных событий, величин и процессов. ИМ позволяет исследовать СУ любой сложности, и на любом уровне детализации его можно представить в виде непрерывного спектра, от моделей реальной системы до абстрактных математических моделей. Структуру ИМ в общем виде можно представить как результат действия реального объекта

f – функция между  и
и  , определяющая величину Е
, определяющая величину Е
 - переменные параметры, которыми мы можем и не можем соответственно управлять.
- переменные параметры, которыми мы можем и не можем соответственно управлять.
Схема показана на рис.

На этапе формирования модели осуществляется переход от представлений о реальной системе к некоторой логической схеме. Подготовка данных состоит в отборе данных, необходимых для построения модели. Трансляция заключается в описании модели на языке применяемом для используемой ЭВМ. Оценка адекватности осуществляется путем обращения к модели и сопоставления полученной информации с данными о реальной системе. Реализация подразумевает практическое применение модели и результатов моделирования.
Недостатки: 1. Получение формальных и графических зависимостей от характеристик системы требует многократных исследований. 2. Разработка программ сложных ИМ весьма трудоемко и требует высокой квалификации разработчиков. 3. Одиночное испытание позволяет получить лишь численное значение нулевых------- величин. 4. ИМ в принципе не точно и нет возможности измерить степень неточности.
4. Следящий электропривод с микропроцессорным управлением.
С выхода микропроцессорного УЧПУ управляющие воздействия на электропривод поступают в виде параллельных кодов, пропорциональных скорости движения по данной координате. Структурная схема регулятора микропроцессорного ЭП координаты Х представлена на рисунке.
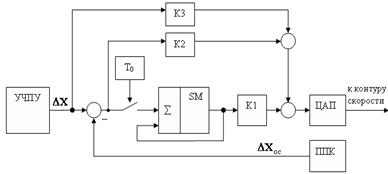
∆Х – задание приращение пути за период таймера  (входное воздействие);
(входное воздействие);
∆Хос - фактическое приращение пути за период таймера (сигнал обратной связи);
SM – сумматор;
К1, К2, К3 – коэффициенты регулятора;
ЦАП – цифроаналоговый преобразователь;
ППК – преобразователь перемещение – код.
В следящем электроприводе применен цифровой ПИ – регулятор в контуре положения. Входное воздействие на привод поступает с выхода интерполятора (или микроинтерполятора), представляющего собой приращение пути за период таймера. Интегратор реализуется на основе сумматора SM.
Регулятор положения имеет канал коррекции по входному воздействию с коэффициентом К3, который позволяет увеличить добротность электропривода по скорости (в установившемся режиме при постоянном значении скорости ошибка по скорости стремится к нулю).
Сигнал на выходе регулятора положения первоначально формируется в виде 32-разрядного слова, 16 значащих разрядов которого после умножения на коэффициент приведения передаются в цифроаналоговый преобразователь.
Дата добавления: 2016-05-05; просмотров: 840;