Приводы подач станков с ЧПУ
16.1.3.1 В станках с ЧПУ применяются приводы с разомкнутой системой управления (с шаговыми двигателями) и с замкнутой СУ (следящие).
Шаговые приводы подачи строятся на основе несилового шагового двигателя (ШД) и гидроусилителя (рис. 16.2,а) или с применением силового шагового электродвигателя. При применении шагового привода точность перемещения рабочих органов станка будет определяться погрешностью отработки ШД командных импульсов, а также зазорами и упругими деформациями кинематической цепи подачи. Частота подаваемых на ШД импульсов определяет угловую скорость вращения ротора, а их число – угол поворота. Единичный угол поворота ротора при подаче одного управляющего импульса обычно равен 1,5°±0,5°, но может быть 0,5°-10°. Ошибка в шаге хотя и может достигать 30%, но при работе ШД она не накапливается.
Следящие приводы подачи (рис. 16.2,б) состоят из электродвигателя, зубчатой передачи или редуктора для снижения частоты вращения и увеличения крутящего момента на ходовом винте, передачи винт-гайка и системы обратной связи по скорости (с датчиком скорости ДС, например, тахогенератором) и по положению рабочего органа станка (с датчиком положения /пути/ ДП или, иначе, обратной связи ДОС). Эффективность работы следящего привода в значительной степени зависит от свойств электродвигателя, погрешностей механизмов кинематической цепи, потерь на трение в направляющих рабочего органа и в передаче винт – гайка, а также от датчиков обратной связи.
Датчики положения могут устанавливаться на различных элементах привода. Однако чем далее от рабочего органа они устанавливаются, тем ниже точность позиционирования из-за погрешностей, возникающих в кинематической цепи. Поэтому в приводах стремятся исключать или максимально упрощать шестеренные редукторы, исключать в передачах зазоры, обеспечивать уменьшение упругих деформаций. В этой связи в приводах используются шариковые винтовые пары, прецизионные шестеренные пары с автоматической выборкой люфта, принимаются конструктивные и технологические меры для повышения жёсткости элементов кинематической цепи и т.д.
Большие потери на трение в направляющих приводят к увеличению упругих деформаций в передаточных механизмах привода подачи, а также к неравномерному перемещению рабочего органа на малых скоростях за счёт так называемых релаксационных колебаний. Для снижения потерь на трение в направляющих станков с ЧПУ применяют обычные направляющие с антифрикционным покрытием, а также гидростатические направляющие и направляющие качения (см. п. 2.1).
В следящих приводах применяются двигатели постоянного тока традиционных исполнений и высокомоментные электродвигатели.
Под высокомоментным понимается двигатель, развивающий на выходном валу крутящий момент, достаточный для преодоления статических и динамических нагрузок привода подачи, и устойчиво работающий на малых частотах вращения (например, от 0,1 об/мин). Высокомоментные электродвигатели могут представлять собой комплекс, состоящий из самого электродвигателя, встроенного тахогенератора, кругового ДОС и тормоза. Такая конструкция облегчает проектирование привода подачи и его монтаж на станке.
Освоение высокомоментных электрогидравлических и электрических приводов (приводов с электродвигателями на постоянных магнитах) обеспечило возможность перехода к безредукторным приводам подач (рис. 16.2,в). Привод ходового винта непосредственно от высокомоментного низкооборотного двигателя позволяет сократить длину кинематической цепи привода подачи, увеличить её крутильную жёсткость и уменьшить число зазоров, влияющих на точность передачи движения.
16.1.3.2 Когда приводной двигатель не может быть соединён непосредственно с ходовым винтом, вращение на последний передаётся через беззазорные зубчатые передачи и редукторы или ремённозубчатые передачи.
В единичной зубчатой передаче одно зубчатое колесо делается разрезным, т.е. состоящим как бы из двух колёс (двух половинок). Устранение зазоров производится за счёт взаимного разворота этих половинок с последующим жёстким закреплением их винтами, либо между ними встраиваются жёсткие пружины, обеспечивающие автоматическую выборку люфта.
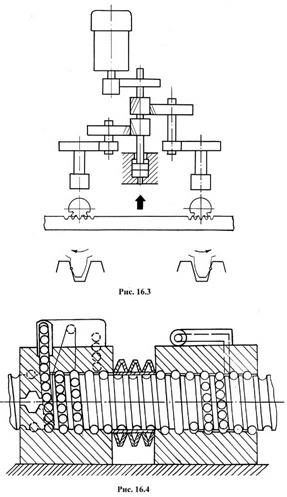
Принцип построения беззазорных редукторов (рис. 16.3) заключается в том, что редуктор составляют из двух кинематических идентичных цепей, образующих замкнутый кинематический контур. Устранение зазоров и создание предварительного натяга в редукторе достигаются взаимным разворотом его кинематических цепей, чаще всего за счёт осевого смещения вала с косозубыми зубчатыми колесами, например пружинами или гидроцилиндром.
Для преобразования вращательного движения приводного двигателя в поступательное перемещение рабочих органов в станках с ЧПУ применяют шариковые винтовые пары (ШВП) или винтовые пары качения. Применение обычных винтовых пар скольжения в приводах точных перемещений столов и суппортов с частыми изменениями направления движения, какими являются приводы подач станков с ЧПУ, не всегда обеспечивает требуемую точность из-за зазоров в такой паре. Кроме того, потери на трение в винтовой паре скольжения достаточно велики. В ШВП (рис. 16.4) шарики катятся по канавкам ходового винта и гайки. Для обеспечения чистого качения шарики постоянно циркулируют, попадая при движении винта в специальный жёлоб, который направляет их к другому концу гайки. В ШВП создают с помощью пружин (см. рис. 16.4) либо за счёт применения шариков большего размера, чем номинальный, предварительный натяг, который повышает точность и жёсткость передачи, но увеличивает нагрузку в механизме.
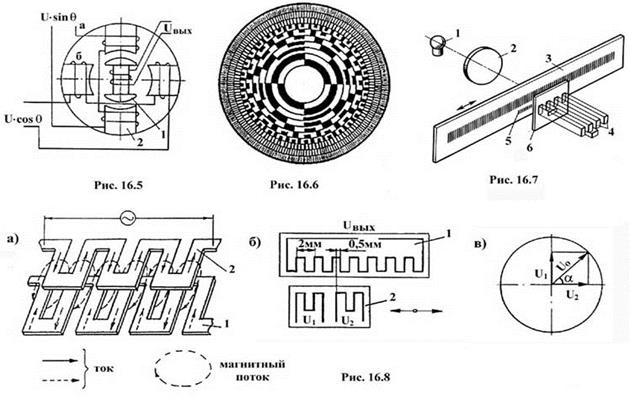
| 16.1.4 Датчики обратной связи Датчики обратной связи(ДОС) предназначены для преобразования линейных перемещений рабочего органа станка в электрический сигнал, содержащий информацию о величине и направлении этих перемещений. По конструктивному исполнению ДОС могут быть круговые и линейные. Круговые ДОС обычно измеряют угол поворота ходового винта или перемещение рабочего органа станка через реечную передачу. Преимуществом кругового ДОС является независимость его габаритных размеров от величины измеряемого перемещения, удобство установки на станке, удобство в эксплуатации. Недостатком круговых ДОС является косвенное (через угол поворота ходового винта) измерение величины перемещения рабочего органа. Линейные ДОС осуществляют непосредственное измерение перемещения рабочего органа станка, что является их основным преимуществом по сравнению с круговыми ДОС. Недостатками линейных ДОС является зависимость их габаритных размеров (длины линейки) от измеряемой величины хода рабочего органа, большая сложность при установке на станке и при эксплуатации. 16.1.4.1 Вращающийся трансформатор (ВТ) является наиболее характерным типом аналогового датчика перемещений, основанного на принципе электромагнитной индукции. ВТ представляет собой маломощную двухфазную электрическую машину переменного тока, у которой (рис. 16.5) при вращении ротора 1 взаимная индукция между обмотками статора 2 и ротора 1 изменяется синусоидально с высокой точностью. На обмотку а статора подается напряжение U×sinq, а на обмотку б – сдвинутое по фазе на 90° напряжение U×сosq , где q - угол смещения, отражающий заданную величину перемещения. С обмотки ротора 1 снимается напряжение Uвых. Число обмоток в ВТ может |
быть различным, однако чаще всего применяют ВТ с двумя взаимно перпендикулярными обмотками на статоре. Такие синусно-конусные вращающиеся трансформаторы называют также резольверами. Помимо ВТ с одной парой полюсов применяют и многополюсные ВТ – редусины с числом пар полюсов от 15 до 180.
16.1.4.2 Фотоэлектрические датчики перемещений – круговые (рис. 16.6) и линейные (рис. 16.7) – состоят из механической, оптической и электронной систем. В таких датчиках световой поток, идущий от осветителя 1 через линзу 2, шкалу линейную (см. рис. 16.7) или круговую (кодовый диск – см. рис. 16.6) и съёмник 6 с определённым образом расположенными растровыми штрихами, попадает на фотодиоды 4.
На рис. 16.6 показан кодовый диск кругового фотоэлектрического датчика на десять двоичных разрядов. Каждое концентричное кольцо стеклянного диска состоит из затемнённых и прозрачных участков, которые не пропускают или пропускают свет на фотодиоды. Кольца соответствуют определённым размерам: наружное кольцо – первому разряду, следующее кольцо – второму разряду и т.д. Кодовый диск устанавливают на станке так, чтобы его полный оборот соответствовал перемещению рабочего органа станка на максимальную величину. При этом каждому положению рабочего органа будет соответствовать единственная кодовая комбинация на диске, выдаваемая в систему управления фотодиодами.
Линейка 3 линейного фотоэлектрического датчика (см. рис. 16.7) имеет основную шкалу и дополнительную (поз. 5 на рисунке) для считывания нуль-метки.
При перемещении линейной или круговой шкалы с рисками относительно съёмника меняется световой поток, идущий от осветителя на фотодиоды и через них проходит ток. В результате выдаются первичные сигналы, изменяющиеся в процессе движения по синусоидальному и косинусоидальному законам, которые затем усиливаются и преобразовываются в форму, воспринимаемую УЧПУ.
16.1.4.3 Линейный индуктосин (рис. 16.8) состоит из линейки 1 и ползуна 2. Длина линейки несколько превышает величину измеряемого перемещения, линейка имеет одну печатную обмотку с шагом 2 мм, с которой снимается индуцируемое напряжение Uвых.
Ползун установлен на рабочем органе станка и перемещается относительно линейки. Он имеет две печатные обмотки (см. рис. 16.8,б), сдвинутые на 1/4 шага (сдвиг по фазе на 90°). На каждую из обмоток подаётся переменный ток частотой 10 кГц, причем на первой обмотке напряжение U1=U0×sinαзд, а на второй U2=U0×cosαзд, где αзд – заданный угол смещения (отражающий заданную величину перемещения). При перемещении ползуна 2 (см. рис. 16.8,а) на выходе обмотки линейки 1 индуцируется напряжение Uвых=U0×sinαзд×cosαф–U0×cosαзд×sinαф, где αф – фактический угол смещения, отражающий фактическое перемещение рабочего органа.
После преобразований получаем: Uвых= U0×sin(αзд–αф).
Если рабочий орган станка находится в заданном положении, αзд=αф, напряжение на выходе обмотки линейки равно нулю. При отсутствии этого равенства на привод подачи поступает сигнал на дальнейшее перемещение.
В системах ЧПУ применяются и другие датчики обратной связи.
Дата добавления: 2016-07-09; просмотров: 1415;