Общие принципы построения и типы систем управления.
Наиболее эффективным способом ограничения уравнительного тока является раздельное управление вентильными группами. В электроприводах с раздельным управлением импульсы в любом режиме работы электропривода подаются только на одну группу вентилей реверсивного преобразователя, и ток протекает только через эту группу. Так как другая группа вентилей при этом заперта, то тем самым, полностью исключается возможность возникновения уравнительных токов, и в электроприводах с раздельным управлением не требуется установка уравнительных дросселей. Это позволяет значительно сократить объем реверсивного преобразователя и примерно в (2¸4) раза его массу.
Структурная схема реверсивного вентильного электропривода с раздельным управлением приведена на рис 55:
Важнейшей составной частью системы управления этих электроприводов является логическое переключающее устройство- ЛПУ. Это устройство на основании сопоставления командных сигналов (Uз ) и сигналов обратных связей ( Uо.н.), характеризующих действительное состояние электропривода, дает разрешение на включение тиристоров той из реверсивных групп, которая должна пропускать ток, и вырабатывает запрещающий сигнал Uз.в. (Uз.н.) , который не допускает подачи управляющих импульсов на тиристоры неработающей группы. Последнее условие должно строго выполняться, т.к. из-за отсутствия уравнительных дросселей при одновременном включении тиристоров в реверсивных группах ТПВ и ТПН возникает междуфазное короткое замыкание.
По этой же причине не допустима подача включающих импульсов на группу, вступающую в работу, до тех пор, пока не прекратится протекание тока через группу, заканчивающую работу. В связи с этим в системе управления должна быть предусмотрена токовая блокировка, работающая от датчика тока ДТ. Последний контролирует снижение тока до нуля в группе, заканчивающей работу. Поскольку датчики тока обладают конечным порогом чувствительности, то необходима пауза между моментом отключения одной группы и моментом включения противоположной, за время которой ток заканчивающей работу группы должен упасть до нуля, а вентили восстановить запирающие свойства. Длительность бестоковой паузы обычно составляет (3¸10) миллисекунд.
Таким образом, для предотвращения аварийных режимов системы управления тиристорных электроприводов с раздельным управлением должны работать предельно четко и надежно и обеспечивать строгое выполнение следующих условий:
1. Недопустимость одновременной подачи управляющих импульсов на обе выпрямительные группы;
2. Поддержание подачи управляющих импульсов на тиристоры инверторной группы при наличии тока в ней;
3. Запрет включения одной выпрямительной группы при наличии тока в другой;
4. При переключении групп должна обеспечиваться “аппаратная пауза”, в течение которой снимаются управляющие импульсы с обеих групп.
В зависимости от требуемого направления вращения и уровня скорости, задаваемых командным органом, и действительного направления вращения и величины фактической скорости двигателя и направления момента нагрузки производственной машины система управления должна подключать ту или иную группу преобразователя и устанавливать необходимую величину угла управления вентилей. Выбор работающей группы осуществляет ЛПУ.
Существуют несколько систем реализации раздельного управления вентильными группами. Среди них наибольшее применение находят два способа раздельного управления:
1. Управление, осуществляющее выбор работающей группы в функции знака сигнала рассогласования заданной частоты вращения двигателя и ее фактического значения;
2. Система самонастройки (система “сканирующей логики”).
3.6.5.2. Системы, работающие в зависимости от знака сигнала рассогласования.
Один из возможных вариантов реализации такой системы приведен на структурной схеме (рис 55).
На входы ЛПУ подаются два сигнала:
1. Сигнал наличия тока преобразователя;
2. Сигнал “ошибки” замкнутой системы автоматического регулирования. Сигнал, обозначенный пунктирной линией, - один из возможных вариантов подачи сигнала “ошибки” на ЛПУ. Этот вариант будет рассмотрен; он интересен в методическом плане. Будет доказана его несостоятельность.
dUвх = Uз - Uо.н. (3-54)
где: Uз - задающее напряжение. Оно задает направление вращения и уровень частоты вращения.
Uо.н. - напряжение обратной связи, характеризующее действительное направление вращения и величину частоты вращения.
Изменение состояния выходов ЛПУ, т.е. разрешение (сигнал) на переключение вентильных групп, наступает только в том случае, если:
1. Ток работающей группы стал равен нулю;
2. Произошла смена полярности сигнала “ошибки”.
Связь между знаком сигнала рассогласования и работающей группой для электроприводов со структурной схемой (рис 55) можно установить из рассмотрения таблицы (Табл. 1). В этой таблице дается состояние отдельных элементов электропривода с раздельным управлением для наиболее характерных режимов работы.
Таблица 1. Состояние отдельных элементов реверсивного тиристорного ЭП для характерных режимов работы.
В- вращение “вперед”; Н- вращение “назад”- колонка №2.
В- выпрямительный; И- инверторный; Д- двигательный;
Т- тормозной режимы - колонка №5.
При составлении таблицы принято, что электропривод имеет замкнутую систему управления, и что вращению двигателя в направлении “Вперед” (В) соответствует положительное значение задающего напряжения Uз , получаемого с командного органа.
Из анализа таблицы видно, что состояние логического переключающего устройства, определяющее выбор той или другой реверсивной группы, а следовательно, и направление тока и момента двигателя, однозначно связано с полярностью напряжения, подаваемого на вход усилителя системы управления,
dUвх = Uз - Uо.н. (3-55)
т.е. включению группы “Вперед” соответствует положительное значение dUвх , работе группы “Назад” - отрицательное.
Эта возможность и используется в электроприводе рассматриваемого типа.
Существует большое количество различных схем и конструкций логических переключающих устройств ЛПУ. Действие ЛПУ, применяемых в подобных схемах, основано на использовании изменения полярности сигнала ошибки регулирования при необходимости переключения групп и контроле наличия тока преобразователя. Оно должно выполнять все перечисленные ранее условия нормального функционирования электропривода. Рассматривать какие- либо конкретные схемы ЛПУ не имеет смысла из-за многочисленности их вариантов.
Безаварийная работа преобразователя в большой степени зависит от надежности действия датчика нулевого тока, сигнал с которого поступает на один из входов ЛПУ. От чувствительности датчика тока зависит время бестоковой паузы.
К датчику нулевого тока предъявляются следующие основные требования:
1. Высокое быстродействие;
2. Высокая чувствительность;
3. Потенциальная развязка силовой цепи преобразователя от цепей управления;
4. Способность насыщаться при больших токах преобразователя.
Существует большое количество типов датчиков нулевого тока. Простейшие из них основаны на использовании обычных трансформаторов тока, первичная обмотка которых включена в цепь питания ТП со стороны переменного тока, и полупроводниковых диодов, выпрямляющих вторичный ток.
В последнее время все чаще в качестве датчиков нулевого тока используются датчики состояния тиристоров. При снижении тока до нуля тиристоры, пропускавшие этот ток, запираются и между анодом и катодом тиристоров появляется напряжение. Если на всех тиристорах вентильной группы есть напряжение того или иного знака, следовательно, ток в этой группе отсутствует и при высоком быстродействии прохождения сигнала бестоковая пауза может быть минимальной (до 3-х миллисекунд).
Для получения безлюфтного сопряжения характеристик двигательного и тормозного режимов и предотвращения больших толчков тока при переходе от выпрямительного режима к инверторному, осуществляемому вторым комплектом вентилей, (или при обратном переходе), напряжение вновь вступающей в работу реверсивной группы в момент переключения должно быть согласовано по величине и направлению с ЭДС двигателя.
Если в системе управления не предусмотреть устройств для выполнения этого условия, то может возникнуть ряд нежелательных явлений.
Если, например, систему управления углами a1 и a2 реверсивных групп выполнить так же, как и для систем совместного управления с одним реверсивным усилителем, воздействующим на СИФУ обеих реверсивных групп, и установить угол начального согласования фазовых характеристик равным 90° (этот вариант показан на рис 55 пунктиром), то переход из двигательного режима в тормозной при изменении знака момента нагрузки (например, при движении в стволе порожних сосудов с тяжелым канатом) будет происходить неудовлетворительно.
Пусть в схеме (рис 55) применена обратная связь по напряжению и при нулевом сигнале на вход усилителей “УВ” и “УН” угол управления обеих групп равен 90° и их фазовые характеристики согласованы по линейному закону. (Выше было показано, что в схемах с совместным управлением подобное согласование обеспечивает практически безлюфтовое сопряжение характеристик).
В целях упрощения не будем учитывать прерывистость тока в области малых нагрузок и примем, что общий передаточный коэффициент системы постоянен.
Переход привода из двигательного режима в тормозной проследим по диаграммам. (Рис 56).
Проследим изменение величин Uя и Ed при перемещении подъемного сосуда в стволе с какой- то точки нижнего положения (т.S1) до точки равновесия в середине ствола (т.S7), а также изменение Uо.н. и dUвх при том же перемещении:
При движении от т.1 до т.2 величина рассогласования dUвх 1, воздействуя на ТПВ через усилитель УВ, систему управления СИФУ -В, обеспечивает ЭДС этого преобразователя Ed1. По мере приближения к точке равновесия величина рассогласования снижается и система автоматического регулирования, реагируя на это изменение (dUвх ), изменяет величину ЭДС ТПВ.
Рассмотрим работу системы на двух участках пути: 1) когда поднимающийся сосуд находится в нижней части шахтного ствола и двигателю приходится развивать значительный момент, связанный с неуравновешенностью концов каната двух подъемных сосудов, и 2) когда движущийся вверх подъемный сосуд приближается к точке равновесия (к середине ствола) и момент статической нагрузки на двигатель- незначителен.
Предположим, что чувствительность системы регулирования чрезвычайно низка и для снижения рассогласования до величины dUвх 2 ,система “заметила” это уменьшение входного сигнала и отреагировала на него, снизив ЭДС ТПВ до величины Ed2. Уменьшение ЭДС преобразователя влечет уменьшение тока двигателя, вращающего момента, частоты вращения и напряжения Uя Рассогласование увеличивается и в т.3 система реагирует на него, повышая ЭДС преобразователя (Ed3).
По мере движения подъемного сосуда в стволе и приближения его к точке равновесия “замечаемое” рассогласование dUвх уменьшается и снижение ЭДС ТПВ становится все более глубоким.
На участке пути вблизи области равновесия из-за малой величины dUвх ЭДС ТПВ становится меньше ЭДС двигателя, вентили этой группы запираются встречной ЭДС якоря двигателя и группа ТПВ не участвует в регулировании частоты вращения.
Если переключение групп вентилей (с ТПВ на ТПН) осуществлять при смене знака dUвх, окажется, что в момент переключения напряжение на якоре двигателя полное, а на ТПН равно нулю. Наступит режим короткого замыкания. Для исключения этого режима и получения безлюфтового сопряжения характеристик необходимо, чтобы сигнал управления переключающим устройством (dUЛПУ) менял знак при меньшем напряжении двигателя еще не доходя до точки равновесия. Это достигается введением в схему звена “УЛ”, передаточный коэффициент которого меньше единицы. Согласование работы реверсивных групп должно быть не стандартным “симметричным”, а характеристики должны быть “подогнаны” одна к другой, что может быть обеспечено использованием для каждой группы вентилей отдельных СИФУ, каждая из которых управляется от своего нереверсивного усилителя (УВ и УН).
Действие корректирующего устройства УЛ основано на том, что на вход ЛПУ подается не разность задающего напряжения Uз и напряжения обратной связи (dUвх), а преобразованные сигналы. На вход ЛПУ подается разность выходного напряжения корректирующего устройства УЛ и напряжения обратной связи. Корректирующее устройство УЛ представляет собой преобразователь, в котором выходное напряжение составляет к/(к+1) от входного, т.е. устройство, понижающее напряжение.
Системы управления, вырабатывающие сигнал на переключение реверсивных групп в зависимости от сигнала рассогласования работают в большинстве случаев достаточно четко и надежно, но не свободны и от некоторых недостатков:
1. Усложнение связей электропривода и преобразователя при необходимости получения безлюфтового сопряжения характеристик двигательного и тормозного режимов;
2. Возможность ложных переключений при высоких значениях коэффициента усиления из-за действия случайных помех.
3.6.5.3. Системы самонастройки или сканирующей логики.
Работа систем самонастройки основана на автоматическом “поиске” группы, в которой существуют условия для протекания тока нагрузки. Известно довольно большое количество различных модификаций самонастраивающихся систем раздельного управления.
Структурная схема реверсивного вентильного электропривода с одной из более простых систем самонастройки показана на рис 57а. На рисунке 57б приведены диаграммы, поясняющие ее работу.
 Рис 57 б)
Рис 57 б)
Переключения реверсивных групп осуществляются с помощью блока реверса БР, состоящего из логического переключающего устройства ЛПУ и мультивибратора МВ. Работа ЛПУ происходит, в основном, так же, как и в ранее рассмотренной схеме. Отличие состоит лишь в том, что на его переключающий вход здесь поступает не сигнал рассогласования, а знакопеременное напряжение от внешнего источника- мультивибратора МВ.(В качестве источника переменного переключающего напряжения Uпер иногда используется питающая сеть 50 Гц).
При отсутствии тока в преобразователе, мультивибратор работает в режиме автоколебаний и ЛПУ непрерывно переключается, периодически выдавая запрещающие сигналы Uз.в и Uз.н на соответствующие группы вентилей, разрешая, тем самым, попеременно работать то одной, то другой. Период переключающего устройства обычно составляет (5¸20)мс. Время включенного состояния каждой группы tв (tн ) меньше полупериода переключающего напряжения на величину аппаратной паузы dtн.
Подобный режим может иметь, например, место, если управляющее напряжение UУ , поступающее с выхода усилителя “У” равно нулю, угол управления обеих вентильных групп равен 90° (или более, в зависимости от начального угла рассогласования), а двигатель неподвижен (интервал времени 0 - t1).
Если подать команду на пуск двигателя в направлении “Вперед”, то под действием напряжения управления UУ угол управления группы ТПВ aв уменьшится, а угол управления группы ТПН увеличится. Тогда при очередном включении группы “Вперед” в ней возникнет ток, и двигатель начнет разгоняться в направлении “Вперед”. Одновременно с этим с датчика тока ДТ на мультивибратор и ЛПУ будет подан сигнал токовой блокировки Ui , который запретит дальнейшее переключение как мультивибратора, так и ЛПУ. Тем самым будет зафиксирована работа группы “Вперед” и заблокирована работа группы “Назад”. Это состояние будет сохраняться на протяжении всего времени протекания тока в группе “Вперед” (интервал t1- t2).
Если за счет уменьшения управляющего напряжения UУ будет подана команда на снижение частоты вращения (момент времени t2), то угол управления группы ТПВ увеличится, а группы ТПН - уменьшится. ЭДС группы “Вперед” сделается меньше ЭДС двигателя, и ток якоря начнет снижаться. После снижения последнего до значения тока удержания iуд снимется токовая блокировка с мультивибратора, последний переключится в противоположное состояние, и на ранее работавшую группу с ЛПУ поступит запрещающий сигнал Uз.в . По истечение времени аппаратной паузы dtн, необходимой для снижения тока от значения тока удержания iуд до нуля, снимется запрещающий сигнал Uз.н с группы ТПН (момент времени t3). Если при этом ЭДС этой группы окажется меньше ЭДС двигателя, то через группу “Назад” потечет ток и вновь вступит в действие токовая блокировка. Последняя на этот раз зафиксирует работу группы “Назад” и запретит переключение мультивибратора и ЛПУ в противоположное состояние до тех пор, пока будет существовать ток в этой группе. Если управляющее напряжение будет изменяться в прежнем направлении, то двигатель вначале будет тормозиться в режиме рекуперативного торможения, а затем, после изменения полярности управляющего напряжения начнет разгоняться в противоположном направлении.
В системе самонастройки переключения групп начинается при любой частоте вращения и любом направлении вращения двигателя после снижения тока до нуля. Поэтому, если при снижении величины “ошибки” dUвх ЭДС работающей вентильной группы ТПВ окажется ниже ЭДС двигателя, и ток снизится до нуля, то сразу же автоматически, независимо от того, изменился знак dUвх, или нет, произойдет переключение групп, и двигатель перейдет в режим рекуперативного торможения. В рассмотренном ранее примере работы шахтной подъемной установки при приближении подъемных сосудов к точке “равновесия” может произойти несколько смен режимов работы электропривода- с двигательного на тормозной и обратно.
Таким образом, в системах самонастройки на закон согласования углов управления реверсивных групп не накладывается каких- либо дополнительных условий. Это позволяет, в частности, применять симметричное согласование и получать регулировочную характеристику Ed = ¦(UУ ) без “люфта” и “безлюфтовое” сопряжение характеристик двигательного и тормозного режимов без применения каких - либо дополнительных устройств, контролирующих величину ЭДС двигателя в момент переключения. (На вид внешних характеристик не влияет зона прерывистых токов- в двигательном и тормозном режимах).
Важнейшими параметрами систем раздельного управления являются чувствительность датчика тока и длительность паузы при переключении групп. Эти параметры взаимосвязаны. Выбор их производится из того условия, что в момент отключения ранее работавшей группы допустим такой ток, который может быть сведен к нулю результирующей ЭДС в силовой цепи на протяжении одной пульсации выпрямленного напряжения. Определяющим при этом является переход из тормозного режима в двигательный (например, в конце перехода с высшей частоты на низшую).
На рис 58 изображены внешние характеристики, используемые при переходе на низшую частоту вращения реверсивного тиристорного электропривода с раздельным управлением вентильными группами.
Переход с двигательного режима в тормозной и обратно происходит при токе равном нулю. при этом первый переход должен осуществляться на более низкое напряжение инверторной группы, а обратный- на более высокое напряжение выпрямительной группы. Это видно из диаграммы (рис 58). Переход же на соседние характеристики одной и той же группы (характеристики с различными значениями углов управления a и b ) происходит при одном значении напряжения, как это показано на диаграмме. Процесс изменения тока при изменении статического момента осуществляется перемещением рабочей точки вдоль характеристики:
На рис 59 показаны направления и примерные соотношения мгновенных значений ЭДС преобразователя и якоря двигателя, а также направление протекания тока при его снижении в двух режимах работы преобразователя- в выпрямительном (рис 59а) и в инверторном (рис 59б). Время спадания тока в инверторном режиме работы получается большим, т.к. снижение тока происходит под действием разности ЭДС инвертора и двигателя. При переходе из двигательного режима в тормозной снижение тока происходит значительно быстрее под воздействием суммы ЭДС выпрямителя и двигателя. Чувствительность датчика тока и необходимая длительность аппаратной паузы определяются соответствующими расчетами. Значения этих параметров зависят от режима работы привода, характера нагрузки, величины частоты вращения двигателя и электромагнитной постоянной времени силовой цепи.
Как было сказано ранее, на практике в качестве датчиков тока сейчас часто используют датчики состояния тиристора. Они позволяют с большой точностью установить момент времени, когда тиристор вследствие спадания тока до нуля, восстанавливает свои запирающие свойства, т.е. момент включения тиристоров.
Это позволяет сделать аппаратную паузу минимальной- (2¸3)мс.
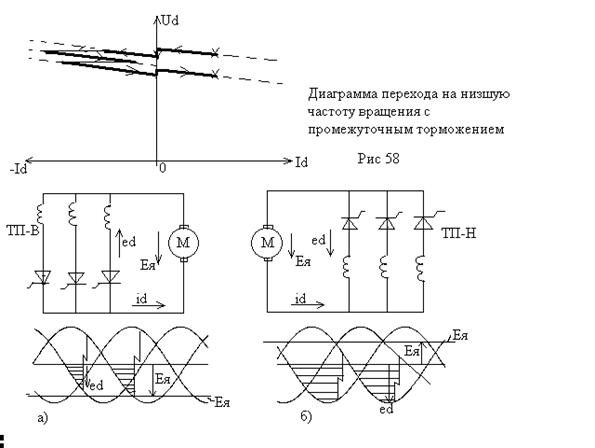
Рис 59
Системы раздельного управления реверсивными ТП обладают рядом важных достоинств:
1. Отсутствие уравнительного тока и возможность полного отказа от уравнительных дросселей;
2. Возможность полного использования питающего трансформатора по напряжению и по мощности, т.к. здесь допустима работа в выпрямительном режиме с углом управления, равным нулю;
3. Более высокий КПД электропривода, т.к. нет потерь от уравнительных токов;
4. Меньшая вероятность опрокидывания инвертора, т.к. общее время работы ТП в инверторном режиме уменьшается во много раз;
5. В некоторых случаях привод имеет лучшие динамические показатели, т.к. благодаря отсутствию уравнительных дросселей суммарная индуктивность якорной цепи оказывается меньшей, чем при совместном управлении;
6. Исключение возможности появления больших динамических уравнительных токов в переходных режимах работы из-за различного быстродействия систем инвертора и выпрямителя вследствие неполной управляемости вентилей и, как следствие, допустимость мгновенных реверсов выходного напряжения (например, при переходе из инверторного в выпрямительный режим);
7. Более простое соединение вентилей и возможность использовать общий блок R-C цепей для защиты вентилей обеих реверсивных групп от перенапряжений.
В то же время системы раздельного управления имеют и недостатки:
1. Усложнение систем управления вследствие необходимости выработки сигнала управления переключением групп и обеспечения условий для безаварийного переключения;
2. Необходимость пауз между работой групп, что снижает быстродействие;
3. Недостаточная стабильность характеристик электропривода в области малых нагрузок, т.е. из-за отсутствия уравнительных токов работа происходит в области прерывистого тока. Это обстоятельство затрудняет использование раздельного управления для электроприводов, которые могут работать в режиме идеального холостого хода или близком к нему, например, приводы лифтов;
4. Трудность точного поддержания частоты вращения в электроприводах со знакопеременным моментом нагрузки;
5. Возможность возникновения толчков тока при переключении групп, т.к. за время паузы теряется непрерывность управления.
Отмеченные недостатки сдерживали применение систем раздельного управления и они не использовались, практически до середины 60-х гг. В настоящее время почти все имевшие место трудности преодолеваются и раздельное управление получает все большее применение не только в электроприводах большой мощности, где его преимущества наиболее весомы, но и в электроприводах средней и малой мощности.
3.7. КПД и коэффициент мощности тиристорного электропривода постоянного тока.
При определении КПД управляемого выпрямителя нужно учитывать, что понятие мощности, выделяемой в цепи нагрузки постоянного тока, может иметь двоякий смысл.
С одной стороны- это мощность Pd , определяемая как произведение постоянных составляющих (средних значений) выпрямленного тока Id и напряжения Ud :
Pd = Ud * Id (3-56)
С другой стороны, действительная полная мощность Pd¢, выделяемая в нагрузке, определяется как средняя мощность от мгновенных значений тока id и напряжения ud в нагрузке за период повторяемости формы выпрямленного напряжения:
 (3-57)
(3-57)
где T - период повторяемости формы выпрямленного напряжения.
Разница в значениях этих мощностей обусловлена наличием пульсаций в выпрямленном напряжении и в токе нагрузки. Так, если обозначить пульсации в виде переменных составляющих did и dud, то можно записать:
 (3-58)
(3-58)
Очевидно, что в случае идеально сглаженного тока нагрузки, когда did равен нулю (dud может быть не равен нулю), значения мощностей Pd и Pd¢ совпадают.
На практике мощность Pd¢ при значительных пульсациях выпрямленного напряжения и тока может быть намного больше Pd . При определении КПД преобразователя этот факт необходимо учитывать. С энергетической точки зрения боле правильно расчет КПД вести относительно мощности Pd¢, хотя иногда используется и величина Pd, рассматриваемая в некотором смысле как “полезная” мощность постоянного тока. В последнем случае составляющую мощности dPd, обусловленную пульсацией напряжения на нагрузке, относят к дополнительным потерям.
Основные потери активной мощности имеют место в следующих частях тиристорных преобразователей:
· В трансформаторе dPт ;
· В тиристорах преобразователя dPв;
· Во вспомогательных устройствах dPвсп (в системах управления, защиты, охлаждения, сигнализации и др.);
· Дополнительные потери dPдоп (потери, обусловленные пульсациями напряжения и тока на нагрузке, потери при переключениях вентилей).
С учетом этих составляющих для преобразователя КПД определяется из следующего соотношения:
h = (Ud Id) / (Ud Id + dPт +dPв +dPвсп +dPдоп) (3-59)
Изготавливаемые в настоящее время ТП большой мощности имеют КПД в пределах (0.85¸0.9). ТП малой и средней мощности имеют КПД (0.7¸0.8).
Дата добавления: 2016-06-13; просмотров: 803;