Виконавчі пневматичні пристрої
Виконавчими пристроями пневмоприводів називаються різноманітні механізми, що забезпечують перетворення надлишкового тиску повітря або вакууму на робоче зусилля. Якщо при цьому робочий орган робить рух відносно пневмопристрою, то він називається пневмодвигуном, а якщо руху немає чи він відбувається разом із пневмопристроєм, то він називається пневмопритискачем, або пневмозахватом.
Пневмодвигуни можуть бути, як і гідродвигуни, обертальної чи поступальної дії та називатися відповідно пневмомоторами й пневмоциліндрами. Конструктивне виконання цих пристроїв багато в чому схоже на їхні гідравлічні аналоги. Найбільше застосування одержали шестеренні, пластинчасті й радіально-поршневі пневмомотори об’ємної дії. На рисунку 12.6, а показана схема радіально-поршневого мотора з передачею крутного моменту на вал через кривошипно-шатунний механізм.
У корпусі 1 симетрично розташовані циліндри 2 з поршнями 3. Зусилля від поршнів передається на колінчастий вал 5 через шатуни 4, прикріплені шарнірно до поршнів і кривошипа колінчастого вала. Стиснене повітря підводиться до робочих камер по каналах 8, які по черзі з’єднуються із впускним Вп і вихлопним Вх каналами розподільного золотника 6, що обертається синхронно з валом мотора. Золотник обертається в корпусі розподільного пристрою 7, до якого підведені магістралі впуску й вихлопу повітря.
Радіально-поршневі пневмомотори є відносно тихохідними машинами із частотою обертання вала до 1000...1500 об/хв. Більш швидкохідні шестеренні й пластинчасті мотори (2000...4000 об/хв), але найбільш швидкохідними (до 20000 об/хв і більше) можуть бути турбінні пневмомотори, у яких використовується кінетична енергія потоку стисненого повітря. Зокрема, такі мотори застосовуються для обертання робочих коліс вентиляторів на гірничих підприємствах.
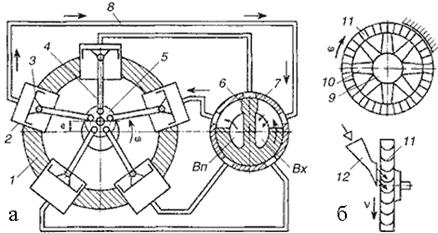
Рисунок 12.6 – Схеми пневмомоторів об’ємної (а) і динамічної (б) дії
На рисунку 12.6, б показана схема пневмопривода колеса вентилятора, що складається з маточини 9 із лопатками 10, до яких жорстко прикріплений обертовий обід із лопатками пневмомотора 11. Потік стисненого повітря, що витікає із сопла 12 по дотичній до вигнутих лопаток 11, віддає свою енергію й змушує обертатися колесо вентилятора з великою швидкістю. Описаний пристрій можна назвати пневмоперетворювачем, що перетворює потік повітря високого тиску на потік низького тиску з набагато більшою витратою.
Пневмопривод відрізняється більшою розмаїтістю оригінальних виконавчих пристроїв з еластичними елементами у формі мембран, оболонок, гнучких ниток, рукавів і т.п. Вони широко використовуються в затискних, фіксувальних, перемикаючих та гальмових механізмах сучасних автоматизованих виробництв. До них належать мембранні й сильфонні пневмоциліндри з відносно малою величиною робочого ходу штока. Плоска гумова мембрана дозволяє одержати переміщення штока на 0,1...0,5 від її ефективного діаметра. При виконанні мембрани у формі гофрованої панчохи робочий хід збільшується до декількох діаметрів мембрани. Такі пневмоциліндри називаються сильфонними. Вони можуть бути із зовнішнім і внутрішнім підведенням повітря. У першому випадку довжина гофрованої трубки під дією тиску зменшується, у другому збільшується за рахунок деформації гофрів. Як еластичний елемент застосовується гума, гумотканинні й синтетичні матеріали, а також тонколистова сталь, бронза, латунь.
Збільшення швидкості виконання операцій у багатьох випадках досягається застосуванням пневмозахоплювачів, схеми яких показані на рисунку 12.7.
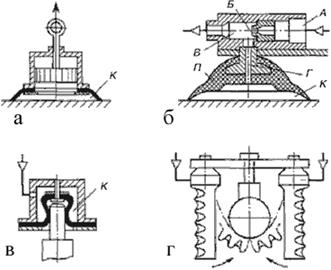
Рисунок 12.7 – Схеми пневмозахоплювачів
Для переміщення листових виробів використовуються пневмоприсоски, що належать до вакуумних захоплювачів безнасосного й насосного типу. У захоплювачах безнасосного типу (рисунок 12.7, а) вакуум у робочій камері К створюється при деформації самих елементів захоплювача, виконаних у вигляді гнучкої тарілки, що прилягає своєю крайкою до деталі, й рухливим поршнем, до якого прикладається зовнішнє зусилля. Величина вакууму при підйомі деталі пропорційна її вазі та звичайно буває не більшою 55 кПа. Для забезпечення кращого притягання, особливо для недостатньо гладкої поверхні деталі, використовують захоплювачі насосного типу, у котрих повітря з робочої камери відсмоктується насосом до глибини вакууму 70...95 кПа.
Часто застосовують прості пристрої ежекторного типу (рисунок 12.7, б), у яких кінетична енергія струменя рідини, пари або повітря використовується для відсмоктування повітря з робочої камери К, що перебуває між присоскою П і деталлю. Стиснене повітря, яке надходить на вхід А, проходить із великою швидкістю через сопло Б ежектора й створює знижений тиск у камері В і каналі Г, що з’єднаний із робочою камерою К.
Для затискача деталей циліндричної форми застосовують пневмозахоплювачі, виконані за схемами (рисунок 12.7 в, г). При підведенні повітря в робочу камеру К пружний циліндричний ковпачок охоплює шийку вала й створює зусилля, достатнє для її затискання. На схемі (рисунок 12.7, г) показаний двосторонній пневмозахоплювач, робочими елементами якого служать сильфони з одностороннім гофром. При створенні надлишкового тиску всередині сильфона гофрована сторона розтягується на більшу довжину, ніж гладка, що викликає переміщення незакріпленої (консольної) сторони трубки в напрямку охоплюваної деталі. Такими пристроями можна фіксувати деталі не тільки круглої форми, але й з будь-якими фасонними поверхнями.
У ряді випадків виникає потреба в переміщенні робочих органів на більші відстані (до 10...20 м і більше) по прямолінійній або скривленій траєкторії. Застосування звичайних штокових пневмоциліндрів обмежене робочим ходом до 2 м. Конструкції безштокових пневмоциліндрів, що задовольняють ці вимоги, показані на рисунку 12.8.
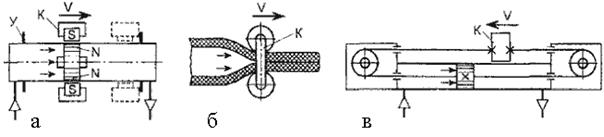
Рисунок 12.8 – Схеми безштокових пневмодвигунів поступального руху
Відсутність твердого штока дозволяє практично у два рази зменшити довжину циліндра у висунутому положенні. На схемі (рисунок 12.8, а) показаний довгоходовий пневмоциліндр із передачею зусилля через потужний постійний магніт. Абсолютно герметична гільза циліндра виконана з немагнітного матеріалу, а її внутрішня порожнина розділяється поршнем на дві камери, до яких підводиться стиснене повітря. У поршні й каретці К, з’єднаній із робочим органом, убудовані протилежні полюси магніту S і N, взаємодія яких забезпечує передачу рушійного зусилля на каретку, що сковзає по напрямних на зовнішній поверхні гільзи. Хід каретки обмежується кінцевими упорами У.
Практично необмежену довжину ходу мають пневмоциліндри з еластичною гільзою (рисунок 12.8, б), охоплюваною двома роликами, з’єднаними кареткою К. Такі пневмоциліндри дуже ефективні для переміщення штучних вантажів по складній траєкторії й у приводах із невеликими робочими зусиллями.
Пневмоциліндр із гнучким штоком показаний на схемі (рисунок 12.8, в). У такій конструкції тягове зусилля передається від поршня на каретку К через гнучкий елемент (звичайно сталевий трос, оздоблений еластичною пластмасою), що охоплює обвідний і натяжний ролики, розташовані на кришках циліндра.
Дата добавления: 2016-06-13; просмотров: 1714;