Автоматизированные системы управления роспуском составов на сортировочных горках. Современная сортировочная горка в значительной степени определяет эффективность
ПРИНЦИПЫ ПОСТРОЕНИЯ АСУ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
СТАНЦИЙ. АВТОМАТИЗАЦИЯ РАБОЧИХ МЕСТ
Исходные положения
На железнодорожном транспорте ведутся работы по созданию структуры сети передачи данных, переходу от локальных задач к задачам совершенствования информационного обеспечения и управления эксплуатационной работой на основе использования современных вычислительных средств и динамических моделей размещения подвижного состава. Экономическая эффективность подсистем АСУ во многом определяется широким использованием недорогостоящей микропроцессорной техники, рациональной структурой размещения больших и малых ЭВМ, оптимальным распределением функций автоматизированного диспетчерского центра управления МПС-ГАДЦУ и ГВЦ, дорожных (региональных) АДЦУ и ДВЦ, линейных предприятий и хозяйств. Большие эксплуатационные издержки в результате завышения штатов ВЦ, использование дорогостоящих ЭВМ, разрозненная информационная база для решения эксплуатационных задач снижают функциональную и экономическую эффективность АСУ. Главная особенность развития в АСУ в последнее время - ЭВМ приходит непосредственно на рабочее место. Прогрессивную роль в этом играет широкое распространение микропроцессорной техники.
На станциях, в особенности крупных сортировочных, участковых и грузовых, ведутся работы по автоматизации первичных технологических процессов и созданию АСУ технологическими процессами
(АСУ ТП) нижнего уровня. Осуществляется интеграция этих подсистем в АСУ ТП с более расширенными функциями, к числу которых относятся АСУ РСГ (автоматизи-рованная система управления роспуском составов с горки) на базе , использования малых ЭВМ и комплекс горочный микропроцессорный (КГМ), которые входят как отдельные укрупненные модули в автоматизированные системы управления станциями (АСУ С) и в том числе в АСУ СС. По состоянию на 1990 г. на железных дорогах системами АРС оборудовано 5 горок, АЗСР-12, ГПЗУ-16, АСУ РСГ-4 горки, АСУ СС-свыше 70 станций. Имеет существенное значение то, чтобы системы АСУ С-системы большей степени интеграции и более высокого уровня - создавались с использованием автоматизации низовых технологических процессов.
Автоматизированные системы управления роспуском составов на сортировочных горках. Современная сортировочная горка в значительной степени определяет эффективность
Современная сортировочная горка в значительной степени определяет эффективность и показатели качества всего процесса расформировании – формирования поездов. В связи с этим она является первоочередным объектом автоматизации на станциях. Процесс роспуска составов на горке состоит из ряда этапов, к наиболее существенным из которых относятся: управление маршрутами скатывания отцепов и регулирование скорости скатывания. Управление маршрутами движения отцепов направлено на реализацию задачи сортировки вагонов по назначениям плана формирования. Регулирование скорости скатывания отцепов с горки предназначено для: обеспечения высокого темпа роспуска составов, высокой степени заполнения путей СП при допустимой скорости соударения скатывающихся отцепов с хорошими ходовыми свойствами и исключения вероятности преждевременной остановки отцепа с плохими ходовыми свойствами или нагона его «хорошим бегуном» на спускной части горки. В конечном счете надежность и точность выполнения этих процессов существенно влияет на перерабатывающую способность станции за счет сокращения «боя» и схода вагонов, необходимости повторной сортировки и частого «осаживания» при плохом заполнении подгорочных путей.
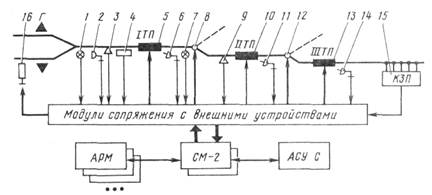
Рис. 15.1. Принципиальная схема функционирования АСУ РСГ:
1, 7-фотоэлектрический датчик прохождения отцепов; 2, 6, //, 14 - радиолокационные скоростемеры; 3, 9-путевые датчики; 4-весоизмеритель; 5, 10, 13-вагонные замедлители; 8, 12-автоматизированный стрелочный перевод; 15-система контроля заполнения путей сортировочного парка; 16-напольные указатели перед горбом горки
Автоматизация технологических процессов на сортировочных горках не получила массового распространения, поскольку базировалась на упрощенных физических моделях процесса роспуска составов. Построение АСУ ТП, в частности сортировочной станцией, стало возможным только с применением теории математического моделирования (отражения) процессов и реализацией этих моделей на ЭВМ.
Автоматизированная система управления расформированием составов на сортировочной горке (АСУ РСГ)- комплексная система автоматических устройств, предназначена для: регулирования скорости скатывания отцепов с горки и скорости роспуска, управления
маршрутами движения отцепов и контроля хода роспуска. АСУ РСГ основывается на статистическом анализе процессов скатывания отцепов. Главной целью АСУ РСГ является оптимальное управление процессом роспуска составов, заключающееся в расчете и реализации таких значений скоростей выхода отцепов с тормозных позиций и скорости движения маневрового локомотива, при которых обеспечивается соблюдение всех технологических ограничений, условий безопасности, обеспечивается максимальный темп роспуска. Система построена на базе управляющей мини-ЭВМ типа СМ-2 отечественного производства,
укомплектованной модулями ввода и вывода сигналов для сопряжения с датчиками и исполнительными устройствами горочной автоматики. Все входные сигналы поступают в управляющий вычислительный комплекс (УВК) автоматически, управление стрелочными переводами и вагонными замедлителями также происходит без участия человека. Информация о расформировываемом составе поступает из АСУ СС в виде сортировочного листа. Упрощенная логика функционирования АСУ РСГ выглядит следующим образом (рис. 15.1). До входа очередного отцепа на первую интервальную тормозную позицию 5 с помощью путевых датчиков 3, фотоэлектрических датчиков 1, весомера 4 и радиолокационного скоростемера 2 осуществляется измерение и расчет скорости движения и ходовых свойств отцепа, весовой категории, длины, подсчет числа осей и контроль правильности расцепки вагонов (сравнение с сортировочным листом). По данным измерений и расчетов корректируются предварительно вычисленные параметры управляющего воздействия на вагонный замедлитель первой тормозной позиции (I ТП) и осуществляется затормаживание отцепа с радиолокационным контролем замедления 6 для достижения расчетной скорости выхода с тормозной позиции. Затем отцеп проходит путь до следующей, II ТП (10). За это время с учетом фактической скорости выхода с I ТП и маршрута, пройденного вагонами по стрелкам и кривым участкам спускной части горки, рассчитываются параметры торможения отцепа на II ТП. На III ТП (13) осуществляется прицельное торможение с учетом длины свободного участка подгорочного пути, информация о которой поступает в УВК от системы контроля заполнения путей (КЗП) 15.
Тем временем в момент отделения от состава следующего отцепа АСУ РСГ переходит к новому циклу функционирования. Автоматический перевод стрелок 8, 12 в соответствии с назначением вагонов в отцепе по плану формирования и специализацией путей в СП осуществляется сразу после освобождения стрелочной зоны предшествующим отцепом 7. Рассчитываемая в зависимости от длины отцепа и маршрута его движения переменная скорость роспуска передается в систему ТГЛ, на горочное табло и путевые указатели 16. Данные о фактическом ходе роспуска с учетом неправильных расценок, запусков
вагонов на неспециализированные пути и т. п. автоматически передаются в АСУ СС для учета накопления на путях СП.
Новый этап автоматизации горочных процессов связан с появлением микропроцессоров и созданием на их базе специализированных управляющих микроЭВМ. Малые габариты и стоимость последних позволили реализовать концепцию распределенных вычислительных систем применительно к сортировочным горкам. Дело в том, что децентрализация выполнения всех функций АСУ РСГ в распределенном вычислительном комплексе из нескольких микроЭВМ взамен УВК на базе относительно дорогостоящей мини-ЭВМ СМ-2 имеет положительные особенности: возможность параллельного решения многих задач, повышенную живучесть комплекса при выходе из строя части оборудования и т.д. Параллельное решение задач, с одной стороны, снижает требования к быстродействию ЭВМ, объему памяти, с другой - делает возможным более детально моделировать управляемый процесс, достигая более оптимальных результатов управления.
Примером такой системы является КГМ-РИИЖТ, представляющая собой совокупность вычислительных и управляющих устройств, средств преобразования, отображения и регистрации сигналов, устройств контроля и диагностики, необходимых для автоматического управления технологическим процессом расформирования составов на сортировочной горке. Элементной и конструктивной базой системы КГМ является комплекс технических средств локальных информационно-управляющих систем (КТС ЛИУС-2), построенный с применением восьмиразрядного микропроцессора. Отличительными особенностями системы являются: рассредоточенность, локальность управления, многоуровневая система обработки информации, значительное расширение функциональных возможностей и программно-аппаратная гибкость, высокая скорость обработки информации, встроенные диагностические средства.
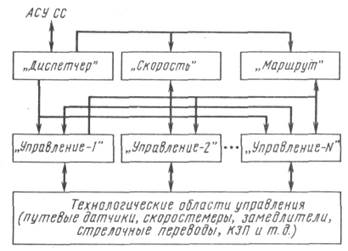
Рис. 15.2. Принципиальная схема функционирования КГМ-РИИЖТ
Качественно новым отличием от предшествующих систем автоматизации горок является принадлежность КГМ к классу адвентивных, обучающихся комплексов.
Входящие в состав системы микропроцессорные блоки распределены по четырем типам локальных подсистем, названным согласно реализуемым ими функциям: «Диспетчер», «Скорость», «Маршрут», «Управление» (рис. 15.2). Такая распределенная микропроцессорная система менее чувствительна к отказам отдельных блоков по сравнению с централизованным УВК на базе мини-ЭВМ. Каждая подсистема объединяет от трех до пяти микропроцессорных блоков, один из которых является координирующим и управляет обменом информацией с другими подсистемами.
Подсистема «Диспетчер» обеспечивает взаимодействие ДСПГ и операторов с системой КГМ посредством отображения информации на черно-белых и цветных дисплеях, ввода информации с клавиатур и кнопочных пультов. Подсистема «Маршрут» осуществляет контроль очередности и правильности расцепа состава, отслеживание маршрутов движения отцепов и регистрирует фактический ход роспуска. Центральной подсистемой КГМ является «Скорость». В ней реализуются:
«обучение» комплекса, основанное на анализе вагонопотока, классификации отцепов по ходовым свойствам, моделировании скатывания отцепов;
предварительный расчет оптимального управления с прогнозированием ходовых свойств каждого отцепа и определением ожидаемых скоростей роспуска, входа и выхода отцепов по всем тормозным позициям.
Подсистема «Скорость» осуществляет также оперативную коррекцию режимов управления и адаптацию моделей в реальном масштабе времени, а также адаптацию при систематических отклонениях фактических параметров по отношению к расчетным.
Подсистемой низшего уровня, непосредственно связанной с напольным оборудованием горочной автоматики, является «Управление». В число датчиков информации входят радиолокационные скоростемеры, датчики прохода осей, весомеры, ФЭУ, рельсовые цепи. Объектами управления являются стрелочные электроприводы и горочные вагонные замедлители.
Системы АСУ РСГ и КГМ-РИИЖТ функционируют с автоматизированной системой
управления станцией и, в частности, с АСУ СС.
Дата добавления: 2016-06-02; просмотров: 6663;