Системы координат программирования станка с ЧПУ HEIDENHAIN.
Данные положения инструмента описываются посредством координат. В декартовой системе координат три направления определены как оси X/Y/Z. Оси расположены взаимно перпендикулярно и пересекаются в одной точке – нулевой. (Правило правой руки. См. рис 1).
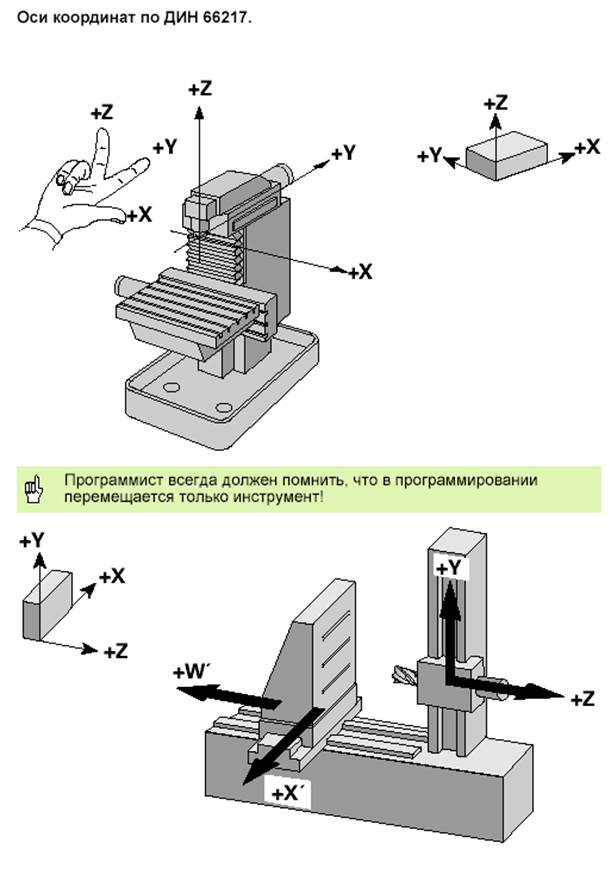
Следовательно, положение в плоскости можно описать двумя координатами точек, а в пространстве тремя.
Координата относящаяся к нулевой точке определяется как абсолютная, а относительной принимается любая другая позиция (привязка). Значения относительных координат обозначаются как инкрементные значения координат.
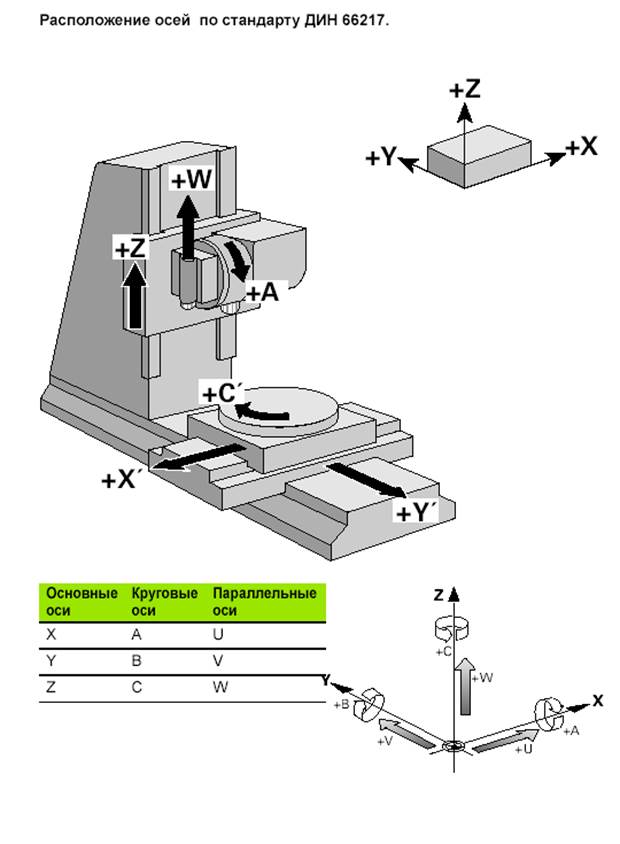
Для деталей с круговыми траекториями, при наличии данных об углах есть возможность определять позиции с помощью полярных координат. В отличии от декартовых координат полярные координаты описывают положение только на плоскости. Полярные координаты имеют нулевую точку на полюсе центра окружности (СС-circle centre). Таким образом положение определяется следующим образом: расстоянием от полюса СС до нулевой точки, углом между базовой осью угла и отрезком, соединяющим полюс СС с точкой.
Нулевая точка станка M является началом (X = 0, Y = 0, Z = 0) системы координат станка, и задается производителем станка. Ее положение нельзя изменить.
Референтная точка R описывает определенную позицию на оси. Эта позиция всегда имеет одинаковое расстояние от нулевой точки станка М и служит в качестве привязки. В зависимости от используемых на станке датчиков может понадобиться пересечение референтной метки:
· при использовании инкрементальных датчиков перемещений после включения необходимо пересечь референтные метки;
· при абсолютных датчиках перемещения сразу после включения системе ЧПУ уже известно текущее положение осей.
Дата добавления: 2016-05-16; просмотров: 4059;