Датчики температуры и давления
Аналоговая часть схемы измерения температуры совпадает с описанной в главе 17 , за исключением диапазона выходных сигналов и, соответственно, несколько иных параметров. Чтобы использовать диапазон встроенного АЦП полностью, нам надо подавать сигнал от 0 до 5 В (точнее, до значения опорного напряжения, которое здесь совпадает с аналоговым питанием), причем с отрицательными напряжениями на входе в данном случае АЦП работать «не умеет» (в некоторых моделях AVR есть АЦП с дифференциальным режимом, и даже с предварительными усилителями, но точность при этом значительно снижается). При указанных на схеме (рис. 20.4) номиналах резисторов диапазон выходных напряжений всей схемы составит около 4,9 В, т. е. мы задействуем весь диапазон АЦП с некоторым запасом. Резистор R4, который устанавливает нижнюю границу диапазона, нужно выбирать равным не сопротивлению датчика при 0°, как в схеме по рис. 17.9, а равным его сопротивлению при нижней требуемой температуре.
С датчиком атмосферного давления все еще проще – ряд фирм выпускают готовые датчики давления. Мы возьмем барометрический датчик МРХ4115 фирмы Motorola , питающийся от напряжения 5 В и имеющий удобный диапазон выхода примерно от 0,2 до 4,6 В. При этом учтем, что большая абсолютная точность нам не требуется, только стабильность – для небольших высот над уровнем моря можно считать, что при изменении высоты на каждые 10–12 м давление меняется примерно на 1 мм рт. ст. Так что в пределах такого города, как Москва, с естественными перепадами высот до 100 и более метров[38], оно само по себе будет «гулять» в пределах как минимум 10 мм рт. ст., даже без учета этажности зданий. И нам все равно целесообразно будет подогнать результат «по месту» так, чтобы не иметь крупных расхождений с прогнозом погоды по телевидению, – иначе показания прибора окажутся никому не нужны.
Схема
С учетом всего сказанного схема термометра‑барометра будет выглядеть так, как показано на рис. 20.4 (напомним, что ОУ МАХ478 можно заменить, например, на ОР293, см. главу 12 ). Чтобы не загромождать схему, здесь не показан узел индикации, т. к. он аналогичен тому, что используется в часах из предыдущего раздела, за исключением того, что должен содержать не четыре, а шесть разрядов (показания в формате «33,3»° и «760» мм рт. ст.). К ним можно добавить постоянно горящие индикаторы, показывающие единицы измерения, подобно тому, как это делалось в главе 17 (рис. 17.9).
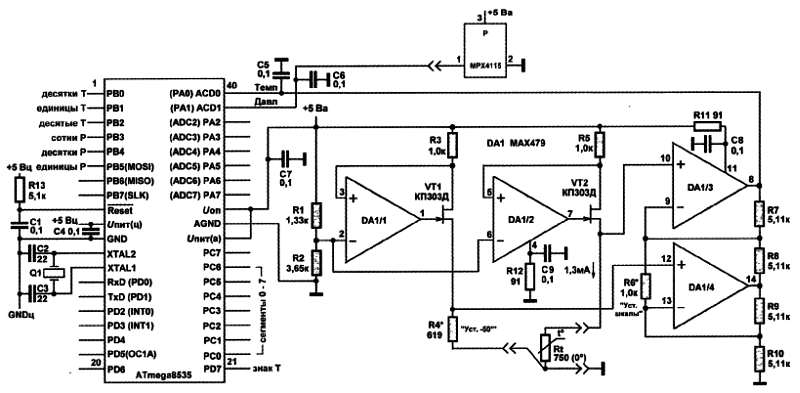
Рис. 20.4. Схема измерителя температуры и давления на МК ATmega8535
На рис. 20.5 показан внешний вид табло такого измерителя, где дополнительные индикаторы изготовлены на основе шестнадцатисегментных PSA‑05 красного свечения, в то время как основные семисегментные цифры – зеленого свечения. Минус, как и в главе 17 , изготовлен из плоского светодиода.
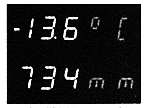
Рис. 20.5. Размещение индикаторов измерителя температуры и давления
Так как здесь выводов портов хватает, то можно назначить для управления сегментами разряды подряд, для чего выбран порт С (семь его битов из восьми). Тогда для упрощения программы можно применить следующий прием: где‑либо в программе определяются константы, соответствующие маске сегментов для рисунка цифр (зажженному сегменту соответствует единица, младший бит соответствует сегменту а, далее по порядку):

Затем в процедуре индикации мы читаем эти константы с помощью инструкции lpm , которая специально предназначена для чтения констант из памяти программ. Инструкция находит их по адресу, в данном случае по метке OUT_N (т. к. адресация в памяти производится байтами, а нумерация команд выполняется словами, то адрес метки приходится умножать на два). После чего выводим в порт С непосредственно маску цифр:
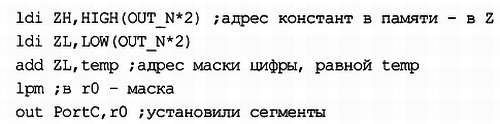
Маски расположены по порядку цифр от 0 до 9. Поэтому перед выполнением этой последовательности команд у нас в рабочем регистре temp должно содержаться значение, соответствующее цифре, выводимой в текущем такте индикации. Так мы избавляемся от процедур рисования знаков. Разряды РВ0‑РВ5 назначаем для управления разрядами индикации, а вывод PD7 – для управления знаком температуры.
Не показан на схеме и программирующий разъем, который одинаков для любой схемы на AVR и приведен на рис. 19.2 (соответствующие выводы для ATmega8535 названы на схеме рис. 20.4).
То, что вывод MOSI (вывод 6 ) совпадает с выводом индикации единиц давления, вас смущать уже не должно. Однако незадействованные в других функциях выводы программирования (в данном случае MISO и SLK, выводы 7 и 8 ) следует не забыть подсоединить к питанию (в нашем случае к цифровому питанию +5 Вц) «подтягивающими» резисторами номиналом от 1 до 10 кОм, как и показано на рис. 19.2.
Схема источника питания показана на рис. 20.6.
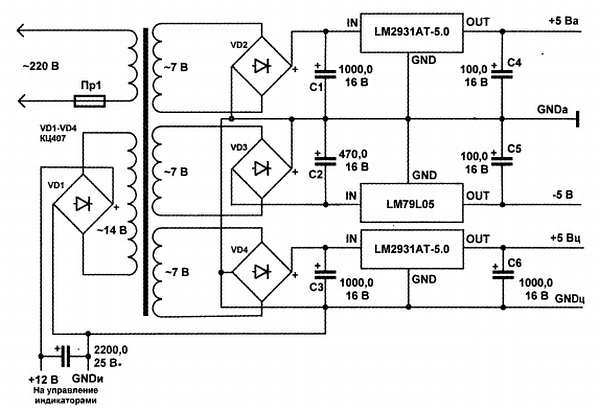
Рис. 20.6. Схема источника питания для измерителя температуры и давления
Измеритель имеет четыре питания (+5 Вц, +5 Ва, – 5 Ва и +12 В для индикации) и три «земли», причем обычным значком « 
» здесь обозначена аналоговая «земля» GNDa. Линия цифровой «земли» обозначена GNDц, кроме этого, имеется еще общий провод индикаторов GNDи. Все три «земли» соединяются только на плате источника питания. Отмечу, что готовый трансформатор с характеристиками, указанными на схеме, вы можете не найти. Поэтому смело выбирайте тороидальный трансформатор мощностью порядка 10–15 Вт на напряжение вторичной обмотки 10–12 В (которое будет использоваться для индикаторов и стабилизатора +5 Вц), измерьте на нем количество витков на вольт (как описано в главе 9 ) и домотайте три одинаковых обмотки на 7–8 В, каждая поверх существующих, проводом не тоньше 0,3 мм в диаметре. Удобнее всего их мотать одновременно сложенным втрое проводом заранее рассчитанной длины.
Программа
Чтобы перейти к обсуждению непосредственно программы измерителя, нам нужно решить еще один принципиальный вопрос. Передаточная характеристика любого измерителя температуры, показывающего ее в градусах Цельсия, должна «ломаться» в нуле – ниже и выше абсолютные значения показаний возрастают. Так как мы тут действуем в области положительных напряжений, то этот вопрос придется решать самостоятельно (в АЦП типа 572ПВ2, напомним, oпpeделeниe абсолютной величины и индикация знака производились автоматически).
Это несложно сделать, если представить формулу пересчета значений температуры в виде уравнения N = K ·|x – Z |, где N – число на индикаторе, х – текущий код АЦП, Z – код АЦП, соответствующий нулю градусов Цельсия (при наших установках он должен соответствовать примерно середине диапазона). Чтобы вычислить значение абсолютной величины, нам придется сначала определять, что больше – х или Z , и вычитать из большего меньшее. Заодно при этой операции сравнения мы определяем значение знака. Если в регистрах AregH: AregL содержится значение текущего кода АЦП х , а в регистрах KoeffH: KoeffL значение коэффициента Z , то алгоритм выглядит примерно вот так:
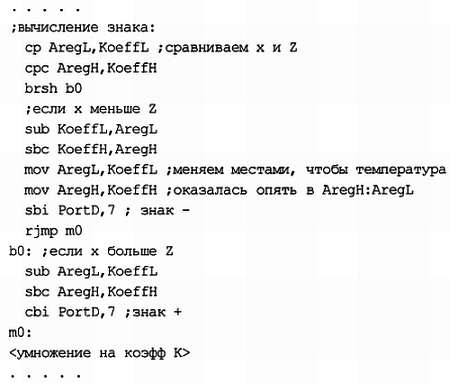
Здесь разряд 7 порта D (вывод 21 контроллера) управляет плоским светодиодом «минус», который горит, если температура ниже нуля, и погашен, если выше. Давление занимает только положительную область значений, поэтому там такой сложной процедуры не понадобится. Если вы посмотрите на характеристику датчика в фирменном описании, то выясните, что он работает не с начала шкалы – нулевому напряжению на выходе (и, соответственно, нулевому коду АЦП) будет соответствовать некоторое значение давления. В результате можно ожидать, что в формуле пересчета значений давления, представленной в виде N = K (x + Z ), все величины будут в положительной области.
Физический смысл коэффициента К – крутизна характеристики датчиков в координатах «входной код АЦП – число на индикаторах». Умножение на коэффициент К мы будем производить описанным ранее методом – через представление его в виде двоичной дроби (за основу берется 210 = 1024, этого будет достаточно). Вычисление ориентировочных значений коэффициентов К и Z поясняется далее, при описании процедуры калибровки.
Теперь можно окинуть взглядом собственно программу. Целиком ее текст и результирующий hex‑файл можно скачать с сайта автора по адресу http://revich.lib.ru/AVR/TPineter.zip. При всей своей видимой «навороченности», программа TPmeter занимает в памяти программ контроллера всего 632 байта – сравните со многими килобайтами и даже десятками килобайт, которые будет занимать аналогичная программа на Arduino .
Как вы видите из таблицы прерываний, здесь используется всего один, самый простой Timer 0, который срабатывает с частотой около 2000 раз в секунду. В его обработчике по метке TIM0 и заключена большая часть функциональности. В каждом цикле сначала проверяется счетчик cRazr , который отсчитывает разряды индикаторов (от 0 до 5). В соответствии с его значением происходит формирование кода индицируемого знака и затем на нужный разряд подается питание. После формирования цифры программа переходит к довольно запутанному, на первый взгляд, алгоритму работы АЦП. На самом деле он не так уж и сложен.
Управляют этим процессом две переменных: счетчик циклов countcyk и счетчик преобразований count . Первый из них увеличивается на 1 каждый раз, когда происходит прерывание таймера. Когда его величина достигает 32 (т. е. когда устанавливается единица в бите 5, см. команду sbrs countcyk, 5 ), то значение счетчика сбрасывается для следующего цикла, и происходит запуск преобразования АЦП, причем для канала, соответствующего значению бита в регистре Flag , указывающего, что именно мы измеряем сейчас: температуру или давление. Таким образом измерения равномерно распределяются по времени.
Сами преобразования отсчитываются счетчиком count до 64 (поэтому цикл одного измерения занимает чуть более секунды: 32x64 = 2048 прерываний таймера, а в секунду их происходит примерно 1953). Когда это значение достигается, то мы переходим к обработке результатов по описанным ранее алгоритмам: сумма измерений делится на 64 (т. е. вычисляется среднее за секунду), затем вычитается или прибавляется значение коэффициента Z и полученная величина умножается на коэффициент К , точнее – на его целый эквивалент, полученный умножением на 1024. Затем произведение делится на это число (отбрасывается младший байт и оставшиеся сдвигаются на два разряда вправо) и преобразуется к распакованному двоично‑десятичному виду, отдельные цифры которого размещаются в памяти для последующей индикации. Как только очередной такой цикл заканчивается, меняется значение бита в регистре Flag , поэтому давление и температура измеряются попеременно. В целом выходит, что значение каждой из величин меняется примерно раз в две секунды и представляет собой среднее за половину этого периода. Собственно результат измерения читается в прерывании АЦП (процедура по метке readADc ), которое происходит автоматически по окончании каждого преобразования. В нем увеличивается значение счетчика count , извлекается из памяти предыдущее значение суммы показаний (в зависимости от регистра Flag – температуры или давления), считываются значения АЦП, суммируются с предыдущими значениями, и сумма записывается обратно в память. Практически весь алгоритм мы описали – осталось только понять, как получить значения коэффициентов преобразования К и Z и затем произвести точную калибровку.
Калибровка
Для того чтобы прибор заработал, в него необходимо ввести предварительные значения коэффициентов преобразования К и Z , причем такие, желательно, чтобы они были достаточно близки к настоящим, и измеритель не показал бы нам сразу «погоду на Марсе». В программе «зашиты» некие значения коэффициентов (см. процедуру Reset , Секцию Запись коэффициентов в самом конце программы), которые вы можете использовать, если в точности воспроизведете схему по рис. 20.4 и используете тот же самый датчик давления. Как они получены?
Схема датчика температуры при указанных параметрах должна выдавать, как вы можете подсчитать, значение от 0 до 5 В в диапазоне температур примерно от ‑47 до 55 °C. То есть на 102 °C у нас приходится 1024 градации АЦП, и крутизна характеристики, если считать градусы с десятичными долями, составит 1020/1024 = 0,996 тысячных долей градуса на единицу кода АЦП. Для вычислений в МК эту величину мы хотим умножить на 1024, так что можно было бы и не делить – ориентировочное значение коэффициента К и так будет 1020.
Величину Z , соответствующую 0 °C, вычислить также несложно. Мы полагаем, что нулевому значению кода соответствует температура ‑47°, тогда значение кода в нуле должно составить величину 470, поделенную на крутизну: 470/0,996 = 471.
Теперь разберемся с давлением. «Если повар нам не врет», то диапазон датчика, соответствующий изменению напряжения на его выходе от 0 до 4,6 В, составляет примерно 850 мм рт. ст. Диапазон 0–4,6 В будет соответствовать изменению кодов примерно от 0 до 940 единиц, т. е. крутизна К равна 850/940 = 0,904 мм рт. ст. на единицу кода. В приведенном для наших расчетов виде это составит 0,904 – 1024 = 926. «Подставка» Z есть значение кода на нижней границе диапазона датчика, которая равна около 11 мм. рт. ст., соответственно, Z = 11/0,904 = 12 единиц. Полученные величины «по умолчанию» и «зашиваем» в программу.
Для уточнения этих величин необходимо произвести калибровку. Откалибруем уже отлаженный прибор сначала по температуре. Для этого следует запустить прибор и поместить датчик температуры в воду, записав для двух значений температур (как можно ближе к 0°, но не ниже его, и около 30–35 °C) показания датчика (t ) и реальные значения температуры по образцовому термометру (t' ). Они, естественно, будут различаться.
Для расчета новых (правильных) значений коэффициентов K ' и Z' достаточно решить относительно них систему уравнений:
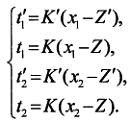
Здесь величины со штрихами относятся к правильным (новым) значениям, а без штрихов – к старым, причем значение коэффициента К нужно подставлять в изначальной форме (а не умноженным на 1024). Система четырех уравнений содержит четыре неизвестных, два из которых (величины кодов x1 и х2 ) вспомогательные.
Если вы забыли, как решаются такие простые системы – обратитесь к любому справочнику по математике для средней школы (или к пособию по использованию Excel в алгебраических расчетах). Вычисленные значения (не забудьте К умножить на 1024!) «забейте» в программу и перепрограммируйте контроллер.
Аналогично калибруется канал давления, только коэффициент Z в уравнениях не вычитается, а прибавляется к х . Но самое сложное здесь – получить действительные значения давления. Далеко не все научные лаборатории располагают образцовыми манометрами для измерения столь малых давлений с необходимой точностью. Поэтому самый простой, хотя и долгий метод, – сравнивать показания датчика с данными по давлению, которые публикуются в Интернете. Данные радио и телевидения лучше не использовать, т. к. текущие значения могут сообщаться с опозданием на полсуток либо вообще отсутствовать, а по завтрашнему прогнозу, естественно, вы ничего не откалибруете.
Для получения двух точек дождитесь, пока давление на улице не станет достаточно низким, а затем, наоборот, высоким – экстремальные значения давления в европейской части России составляют примерно 720 и 770 мм рт. ст. Чем дальше будут отстоять друг от друга значения, тем точнее калибровка. Для повышения точности можно усреднить коэффициенты, рассчитанные по нескольким парам значений давления, но это стоит делать, только если у вас хватит терпения вести наблюдения в течение нескольких месяцев, когда будет пройдено несколько минимумов и максимумов. Средние значения давления при калибровке лучше не учитывать, т. к. ошибка ее из‑за узкого интервала и так достаточно велика.
Можно ли объединить часы, описанные в первом разделе этой главы, с измерителем температуры и давления? Конечно, но я предоставляю читателям сделать это самостоятельно. Одно только замечание: общее количество индикаторов составит 10 штук (6 для измерителя и 4 для часов), и это почти предельная величина для динамической индикации. Увеличивать частоту обхода индикаторов нельзя до бесконечности – у контроллера может просто не хватить быстродействия, и он начнет терять прерывания, сбиваясь в опросе датчиков или, что еще хуже, в отсчете времени (правда, это отчасти решается увеличением тактовой частоты). Но и быстродействие транзисторных ключей тоже ограничено, и при слишком высокой частоте обхода будут подсвечиваться ненужные и терять яркость нужные сегменты. Потому, возможно, схему придется продумывать более тщательно и применять индикаторы со встроенным контроллером‑драйвером, позволяющим обойтись меньшим числом соединений и без дополнительных ключей. Такие индикаторы мы увидим в следующей главе, где будем конструировать настоящую метеостанцию с часами, выносным радиодатчиком и сохранением данных на флэш‑карте.
ГЛАВА 21
Основы Arduino
Дата добавления: 2016-05-11; просмотров: 1839;