Основы конструкции и принцип действия трехвинтового насоса
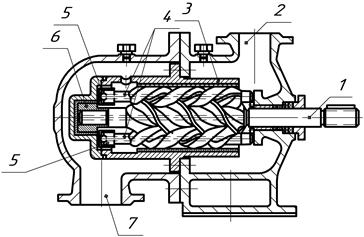
Наибольшее применение в технике нашли трехвинтовые насосы с циклоидальным зацеплением двухзаходных винтов (рис. 9.1), преимуществом которых по сравнению с другими типами винтовых насосов является обеспечение практически полной герметизации полостей нагнетания от полостей всасывания при условии выполнения рабочей длины винтов большей, чем расстояние по оси вращения между их двумя последовательными уплотнениями. То есть необходимо обеспечение условий, при которых раскрытие уплотнения винтов в полости нагнетания происходило бы не раньше момента образования соответствующего уплотнения в полости всасывания. Двухзаходной нарезка винтов выполняется с целью их динамической уравновешенности.
Ведущий 1 и два ведомых 4 винты вращаются, как в подшипнике, в обойме 3. Сечением каждого винта плоскостью, нормальной к его оси, является двузубой шестерней. Если обеспечить этой шестерне винтовое движение (вращательное движение с перемещением с постоянным шагом  вдоль оси винта), она вычертит поверхность винта, причем боковая поверхность витков будет образована циклоидами, а периферийная – цилиндром.
вдоль оси винта), она вычертит поверхность винта, причем боковая поверхность витков будет образована циклоидами, а периферийная – цилиндром.
а)
б) в)
Рис. 9.1. Трехвинтовой насос
Вращательное движение ведущему винту 1 передается от приводного двигателя насоса, а ведомые винты 4 вращаются за счет действия гидростатических сил давления жидкости на их витки. Механического силового соединения (например, шестерной передачи) между винтами насоса не применяется. Надежное вращение ведомых винтов 4 обеспечивается подбором соответствующего значения угла подъема винтовой линии, при котором радиальные составляющие сил давления жидкости на витках обеспечат преодоление сил трения винтов в обойме 3 и в опорном узле.
Гидромашины с большими углами подъема винтовой линии пригодны для работы как в насосном, так и моторному режимах.
Уменьшение угла подъема винтовой линии нарезки позволяет увеличить при той же общей длине винтов число замкнутых камер машины (между полостями нагнетания и всасывания) и соответственно повысить ее герметичность.
Заполнение рабочих камер жидкостью, которая подводится во всасывающее пространство насоса через патрубок 7, осуществляется только через отверстие в верхней части обоймы 3. Это обеспечивает наличие рабочей жидкости в винтах при остановленном насосе и исключение возможности запуска гидромашины на „сухих” винтах.
Жидкость, которая заполнила винтовые впадины со стороны полости всасывания, после некоторого поворота винтов оказывается герметически отсоединенной в рабочих камерах от этой полости и под действием винтовых нарезок перемещается вдоль оси насоса в полость нагнетания и вытесняется через патрубок 2 во внешнюю сеть.
Осевые силы, как составляющие гидростатических сил давления жидкости на витки винтов, стремятся сдвинуть винты по направлению от нагнетательной к всасывающей полости. Для предотвращения перегрузки опорных узлов силами давления жидкости применяют их гидростатическое уравновешивание, для чего через внутренние осевые сверления в винтах подводят жидкость из нагнетательного пространства в разгрузочный поршень 6 и разгрузочные стаканы 5.
Объемные потери в винтовом насосе преимущественно имеют место вдоль винтов зацепления. Исходя из этого, для обеспечения высокого объемного КПД насоса при значительных давлениях рабочей жидкости необходимо увеличивать количество последовательно размещенных в осевом направлении герметических рабочих камер, то есть – длину винтов насоса.
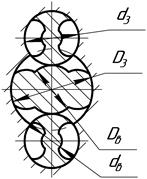
В одном сечении (рис. 9.1, б)контакт винтов происходит по внутренней поверхности тела ведущего винта диаметром  и внешних цилиндрических поверхностях диаметром
и внешних цилиндрических поверхностях диаметром  ведомых винтов.
ведомых винтов.
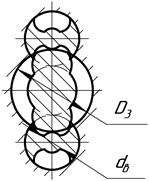
В другом сечении (рис. 9.1, б)контакт винтов происходит по внешней цилиндрической поверхности диаметром  ведущего винта и внутренних поверхностях тел ведомых винтов диаметром
ведущего винта и внутренних поверхностях тел ведомых винтов диаметром  .
.
Теоретически камеры полностью отделены одна от другой, но в местах соединения боковых поверхностей витков разделение осуществляется лишь по линиям соприкосновения, что требует высокой точности изготовления винтов.
В то же время, высокая равномерность подачи трехвинтового насоса объясняется тем, что невзирая на дискретный характер переноса жидкости, благодаря отделению рабочих камер линиями контакта, а не протяженными контактирующими поверхностями, вытеснение рабочей жидкости в нагнетательную полость происходит непрерывно.
Механические потери в трехвинтовом насосе определяются трением винтов об обойму, трением в зацеплениях и в опорных узлах (подшипниках). На ведомые винты действуют радиальные составляющие сил от взаимодействия этих винтов с ведущим винтом, которые прижимают их к внутренней поверхности обоймы и приводят к определяющим, по сравнению с другими, потерям на трение. Поэтому по гидромеханическому КПД  трехвинтовые насосы уступают, например, поршневым.
трехвинтовые насосы уступают, например, поршневым.
В то же время минимизация гидравлических потерь во всасывающей полости за счет конструктивных возможностей выполнения гидравлически удачного подвода жидкости в рабочие камеры обеспечивает насосу хорошую всасывающую способность.
Дата добавления: 2016-04-14; просмотров: 3615;