Определение и классификация гидроцилиндров
Гидроцилиндр - объемный гидродвигатель с прямолинейным возвратно-поступательным движением выходного звена.
Согласно [17] по конструктивному выполнению рабочих звеньев гидроцилиндры разделяются на поршневые (рис. 10.1, а-в), плунжерные (рис. 10.1, г), мембранные (рис. 10.1, л) и сильфонные (рис. 10.1, м).
а) б)
в) г)
д)
Рис. 10.1. Схемы гидроцилиндров
е)
ж)
з)
Продолжение рис. 10.1.
к) л)
м)
Продолжение рис. 10.1.
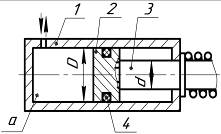
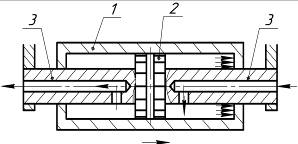
Основными конструктивными элементами поршневого гидроцилиндра является корпус (цилиндр) 1 (рис. 10.1, а-в), в котором размещается поршень (рабочее звено) 2 с односторонним (рис. 10.1, а, б) или двухсторонним (рис. 10.1, в) штоком (выходное звено) 3. При этом, внутренняя полость гидроцилиндра, через которую проходит шток 3 поршня 2, называется штоковой полостью, а через которую не проходит шток 3 – бесштоковой. Штоки 3 гидроцилиндров указанных конструктивных решений соединяются с механизмами, обеспечивая при возвратно-поступательном движении одностороннее (рис. 10.1, а) или двухстороннее (рис. 10.1, б, в) действие на соответствующие элементы. В гидроцилиндрах одностороннего действия (рис. 10.1, а) движение выходного звена под действием сил давления рабочей жидкости возможно только в одном направлении, а в противоположном – под действием других сил (веса грузов, которые перемещаются, сил сжатия пружины и др.). В гидроцилиндрах двухстороннего действия (рис. 10.1, б, в) движение выходного звена под действием сил давления рабочей жидкости возможно в двух противоположных направлениях.
Для предотвращения внутреннего перетекания рабочей жидкости из полости с рабочим давлением в полость со сливным давлением (между подвижным поршнем 2 и неподвижным корпусом 1), а также внешних ее утечек [между подвижными (штоками 3) и неподвижными (корпусом 1) элементами гидроцилиндра] используются уплотнительные кольца 4 и 5 (или другие уплотнительные устройства).
Гидроцилиндр одностороннего действия с односторонним штоком (рис. 10.1, а) имеет одну рабочую полость (камеру)  , ограниченную корпусом (с торцевой крышкой) и поршнем, – бесштоковую полость. Гидроцилиндр двухстороннего действия с односторонним штоком (рис. 10.1, б) имеет две рабочих полости (камеры) – бесштоковую полость, ограниченную, как и в предыдущем случае, корпусом (с торцевой крышкой) и поршнем и штоковую полость, ограниченную кроме корпуса (с торцевой крышкой) и поршня, также и штоком.
, ограниченную корпусом (с торцевой крышкой) и поршнем, – бесштоковую полость. Гидроцилиндр двухстороннего действия с односторонним штоком (рис. 10.1, б) имеет две рабочих полости (камеры) – бесштоковую полость, ограниченную, как и в предыдущем случае, корпусом (с торцевой крышкой) и поршнем и штоковую полость, ограниченную кроме корпуса (с торцевой крышкой) и поршня, также и штоком.
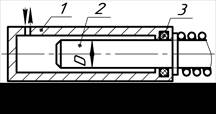
В плунжерных гидроцилиндрах (рис. 10.1, г) подвижным элементом является плунжер 2, который перемещается в корпусе (цилиндре) 1. Плунжерные гидроцилиндры могут быть только одностороннего действия с односторонним штоком и одной рабочей камерой – плунжерной полостью. Однако плунжерные гидроцилиндры отличаются простотой изготовления, так как предусматривают только внешнее уплотнение 3 (между подвижным плунжером 2 и неподвижным корпусом 1) и не нуждаются в высокоточной обработке внутренней поверхности цилиндра 1.
Расстояние, которое проходит шток или плунжер из одного крайнего положения в другое, называется ходом гидроцилиндра, а расстояние, которое проходит под нагрузкой шток или плунжер между двумя заданными положениями – рабочим ходом гидроцилиндра. Движение штока поршня наружу гидроцилиндра является прямым ходом, а внутрь – обратным ходом гидроцилиндра [17].
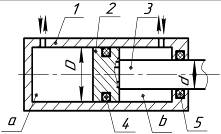
В некоторых случаях целесообразно использовать в качестве подвижного элемента гидроцилиндра корпус (выходное звено) 1, соединяя его с соответствующим элементом машины (рис. 10.1, д). При этом двухсторонний шток 3 с поршнем 2 крепится неподвижно, а рабочая жидкость подводится в штоковые полости цилиндра 1 через гибкие шланги, или через внутренние каналы в штоках 3.
Для возможности получения суммарного хода подвижных элементов цилиндрового гидродвигателя, который превышает длину корпуса 1, применяют телескопические гидроцилиндры (рис. 10.1, е). Телескопические гидроцилиндры состоят из нескольких (как правило, до шести) концентрически размещенных поршней 2, 3, 4, которые перемещаются один относительно другого. Принцип и последовательность выдвижения и втягивания поршней 2, 3, 4 определяются конструкцией гидроцилиндра и устройством распределения жидкости.
Гидроцилиндр, в котором полный ход выходного звена равняется ходу рабочего звена (поршня), называется одноступенчатым, а гидроцилиндр, в котором полный ход выходного звена равняется сумме ходов всех рабочих звеньев (поршней), – многостепенчатым (телескопическим).
Для несколькократного увеличения усилия на выходном звене гидроцилиндра при ограничении габарита его поперечного сечения и возможности увеличения общей длины используются сдвоенные (тандем-цилиндры, рис. 10.1, ж, з), а также строенные, последовательно соединенные цилиндры. Такие цилиндры состоят из соосно и последовательно размещенных несколько (двух, трех) гидроцилиндров с односторонним (рис. 10.1, ж), или двусторонним (рис. 10.1, з) общим штоком и с параллельно соединенными полостями рабочих камер. Усилие на выходном звене такого цилиндра равняется сумме усилий, которые возникают на каждом поршне, а его скорость соответственно уменьшается пропорционально числу этих поршней сравнительно с однопоршневым гидроцилиндром при неизменном расходе рабочей жидкости.
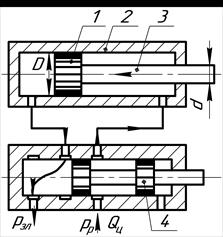
В многоскоростном гидроцилиндре (рис. 10.1, к) со ступенчатым поршнем 5 со штоком 4 образуются три рабочих полости ,  и
и  , что позволяет при определенной схеме питания цилиндра рабочей жидкостью через каналы 1, 2 и 3 обеспечивать три разных скорости прямого движения исходного звена при неизменности ее хода и одну скорость обратного движения. Патрубок 6 при этом остается неподвижным относительно корпуса 7.
, что позволяет при определенной схеме питания цилиндра рабочей жидкостью через каналы 1, 2 и 3 обеспечивать три разных скорости прямого движения исходного звена при неизменности ее хода и одну скорость обратного движения. Патрубок 6 при этом остается неподвижным относительно корпуса 7.
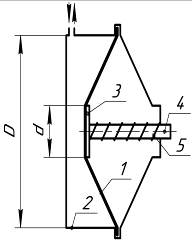
Мембранный гидроцилиндр имеет в качестве основного элемента эластичную мембрану 1 (преимущественно – резинотканевую), как правило в форме круга, зажатую по периферии фланцами корпуса 2 (рис. 10.1, л). В большинстве случаев мембрана имеет жесткий центр 3, связанный со штоком 4. Сила давления рабочей жидкости, которая подводится под мембрану 1, вынуждает ее деформироваться и перемещает шток 4 в осевом направлении. Возвращение мембраны 1 и штока 4 в начальное положение происходит под действием внешней нагрузки или пружины 5.
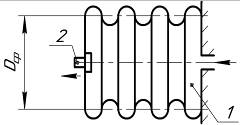
Сильфонный гидроцилиндр имеет вид гармоникоподобного, как правило металлического, цилиндра 1, который имеет возможность удлиняться или укорачиваться под действием внутреннего или внешнего давления жидкости (рис. 10.1, м). При этом происходит возвратно-поступательное перемещение штока 2, связанного с соответствующими механизмами.
Отечественной промышленностью выпускаются гидроцилиндры преимущественно с диаметрами поршней от 25 до 320 мм, ходом подвижных элементов до 6000 мм, скоростью перемещения выходного звена до 1 м/с, давлениями рабочих жидкостей до 35 МПа. Среди производителей гидроцилиндров – ЗАО „Винницкий агрегатный завод” (г. Винница), „Гидросила МЗТГ” (г. Мелитополь) и другие.
10.2. Сила, скорость и мощность поршневого и плунжерного гидроцилиндров
При рабочем ходе гидроцилиндра на поршень (плунжер, корпус) в общем случае действуют (при горизонтальном размещении цилиндра):
- сила  рабочего давления
рабочего давления  жидкости на рабочую площадь
жидкости на рабочую площадь  поршня (плунжера, корпуса) в рабочей полости;
поршня (плунжера, корпуса) в рабочей полости;
- сила  сливного давления
сливного давления  жидкости на рабочую площадь
жидкости на рабочую площадь  поршня (корпуса) в сливной полости;
поршня (корпуса) в сливной полости;
- сила  трения в уплотнениях гидроцилиндра и вязкостного трения рабочей жидкости;
трения в уплотнениях гидроцилиндра и вязкостного трения рабочей жидкости;
- сила  инерции подвижных элементов системы;
инерции подвижных элементов системы;
- сила  обратной пружины,
обратной пружины,
результирующая которых составляет силу гидроцилиндра  . Под силой гидроцилиндра следует понимать силу, которая возникает на штоке, плунжере или корпусе гидроцилиндра в вследствие подачи в него рабочей среды под давлением [17].
. Под силой гидроцилиндра следует понимать силу, которая возникает на штоке, плунжере или корпусе гидроцилиндра в вследствие подачи в него рабочей среды под давлением [17].
Сила рабочего давления жидкости равняется
 ,
,
где рабочая площадь поршня в рабочей полости определяется по формулам:
- при подаче рабочей жидкости в бесштокову полость гидроцилиндра (в плунжерный гидроцилиндр)
 ; (10.1)
; (10.1)
- при подаче рабочей жидкости в штоковую полость гидроцилиндра
 , (10.2)
, (10.2)
здесь  и
и  - соответственно диаметр поршня (плунжера) и штока.
- соответственно диаметр поршня (плунжера) и штока.
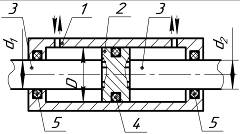
Для гидроцилиндров с двухсторонними штоками разного поперечного сечения (рис. 10.1, в) рабочие площади поршня в рабочей полости рассчитываются по формуле (10.2), где в качестве диаметров штоков используют значение  или
или  в зависимости от того, в полость гидроцилиндра с каким диаметром штока в настоящее время подается рабочая жидкость.
в зависимости от того, в полость гидроцилиндра с каким диаметром штока в настоящее время подается рабочая жидкость.
В телескопических и многоскоростных гидроцилиндрах рабочие площади поршней в рабочей полости определяются площадями поперечных сечений тех подвижных элементов (круглой или кольцевой формы), на которые действует в настоящее время давление рабочей жидкости .
Сила сливного давления жидкости учитывается при определении силы гидроцилиндра в цилиндрах двустороннего действия и равняется
 ,
,
где рабочая площадь поршня в сливной полости рассчитывается по формулам (10.1) и (10.2) с учетом сказанного для условий рабочей полости.
Рабочие площади в рабочих и сливных полостях гидроцилиндров с подвижными корпусами (рис. 10.1, д) также рассчитываются по формулам (10.1) и (10.2) в зависимости от конструктивного выполнения цилиндра.
Сила трения в уплотнениях гидроцилиндра и вязкостного трения рабочей жидкости приводит к гидромеханическим потерям, которые оцениваются гидромеханическим КПД гидроцилиндра  .
.
Сила инерции подвижных элементов системы определяется зависимостью
 ,
,
где  - ускорение подвижных элементов гидроцилиндра;
- ускорение подвижных элементов гидроцилиндра;
 - масса подвижных элементов, включая массу жидкости со стороны сливной полости.
- масса подвижных элементов, включая массу жидкости со стороны сливной полости.
Сила инерции приобретает большое значение в быстродействующих гидросистемах с гидроцилиндрами, в которых количество ходов (реверсов) достигает нескольких тысяч за одну минуту.
Обратные пружины применяются, как правило, в гидроцилиндрах одностороннего действия (рис. 10.1, а) и плунжерных гидроцилиндрах (рис. 10.1, г) для обеспечения обратного движения. При прямом движении гидроцилиндра, в этом случае, необходимо преодолевать силу обратной пружины.
Сила гидроцилиндра, как результирующая рассмотренных сил, составляет
 ,
,
или
 . (10.3)
. (10.3)
При отсутствии в конструкции гидроцилиндра обратной пружины и пренебрегая силой инерции подвижных элементов, выражение (10.3) для силы гидроцилиндра приобретает вид
 .
.
Скорость гидроцилиндра, под которой следует понимать скорость относительного перемещения штока или плунжера и корпуса гидроцилиндра [17], определяется отношением идеального расхода жидкости  цилиндром к рабочей площади поршня в рабочей полости
цилиндром к рабочей площади поршня в рабочей полости
 . (10.4)
. (10.4)
Расход (действительный, фактический) рабочей жидкости  цилиндром превышает его идеальное значение на величину объемных потерь
цилиндром превышает его идеальное значение на величину объемных потерь  , что оценивается объемным КПД гидроцилиндра
, что оценивается объемным КПД гидроцилиндра
 . (10.5)
. (10.5)
С учетом (10.5), выражение (10.4) для определения скорости гидроцилиндра можно представить следующим образом
 .
.
Если разницу между рабочим и сливным давлениями жидкости назвать давлением гидроцилиндра  , то его потребляемая мощность равняется
, то его потребляемая мощность равняется
 , (10.6)
, (10.6)
а мощность (полезно использованная) гидроцилиндра (мощность на выходном звене)
 , (10.7)
, (10.7)
где  - общий КПД гидроцилиндра
- общий КПД гидроцилиндра
 .
.
Согласно полученных зависимостей для гидроцилиндра одностороннего действия с односторонним штоком (рис. 10.1, а) и плунжерного гидроцилиндра (рис. 10.1, г):
- сила гидроцилиндра
 ;
;
- скорость гидроцилиндра
 .
.
Для гидроцилиндра двухстороннего действия с односторонним штоком (рис. 10.1, б)
- толкающая сила гидроцилиндра (сила гидроцилиндра, который возникает во время выдвижении штока [17])
 ; (10.8)
; (10.8)
- тянущая сила гидроцилиндра (сила гидроцилиндра, который возникает при втягивании штока [17])
 ; (10.9)
; (10.9)
- скорость при прямом ход гидроцилиндра (движении штока поршня наружу гидроцилиндра [17])
 ; (10.10)
; (10.10)
- скорость при обратном ходе гидроцилиндра (движении штока поршня внутрь гидроцилиндра [17])
 ,
,
то есть при прямом ходе скорость цилиндра  меньше, чем скорость
меньше, чем скорость  при обратном ходе, в количество раз, которое равняется соотношению рабочих площадей гидроцилиндра (соотношению противоположных площадей поршня гидроцилиндра, на которые действует давление рабочих сред, согласно [17] равняется единице или больше ее)
при обратном ходе, в количество раз, которое равняется соотношению рабочих площадей гидроцилиндра (соотношению противоположных площадей поршня гидроцилиндра, на которые действует давление рабочих сред, согласно [17] равняется единице или больше ее)
 ,
,
то есть  .
.
Так как в подавляющем большинстве случаев  , то учитывая
, то учитывая  с приемлемой для технических расчетов точностью выражения (10.8) и (10.9) для гидроцилиндра двухстороннего действия с односторонним штоком (рис. 10.1, б)можно записать следующим образом:
с приемлемой для технических расчетов точностью выражения (10.8) и (10.9) для гидроцилиндра двухстороннего действия с односторонним штоком (рис. 10.1, б)можно записать следующим образом:
- толкающая сила гидроцилиндра
 ;
;
- тянущая сила гидроцилиндра
 ,
,
то есть толкающая сила  превышает тянущую силу
превышает тянущую силу  в количество раз, которое равняется соотношению рабочих площадей гидроцилиндра
в количество раз, которое равняется соотношению рабочих площадей гидроцилиндра  . При этом мощности гидроцилиндра как при прямом, так и при обратном ходе сохраняются неизменными
. При этом мощности гидроцилиндра как при прямом, так и при обратном ходе сохраняются неизменными
 . (10.11)
. (10.11)
Для гидроцилиндров с двусторонними штоками разного поперечного сечения (рис. 10.1, в):
- сила гидроцилиндра при подаче рабочей жидкости в штоковую полость с диаметром штока
 ;
;
- сила гидроцилиндра при подаче рабочей жидкости в штоковую полость с диаметром штока
 ;
;
- скорость гидроцилиндра при подаче рабочей жидкости в штоковую полость с диаметром штока
 ;
;
- скорость гидроцилиндра при подаче рабочей жидкости в штоковую полость с диаметром штока
 .
.
Мощность такого гидроцилиндра согласно (10.7) определяется произведением силы на скорость цилиндра для соответствующего его хода.
10.3. Сила, скорость и мощность телескопического, сдвоенного и многоскоростных гидроцилиндров
10.3.1. Телескопические гидроцилиндры
В телескопическом гидроцилиндре полный ход выходного звена равняется сумме ходов всех рабочих звеньев (поршней).
Наиболее целесообразным конструктивным решением такого гидроцилиндра является такое, при котором внутренняя полость первого поршневого штока используется в качестве цилиндр для поршня второй ступени, внутренняя полость штока поршня второго цилиндра – как цилиндр для последующей (третьей) ступени и так далее Число ступеней в телескопической схеме доходит до шести.
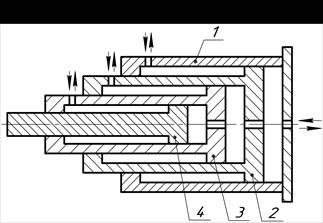
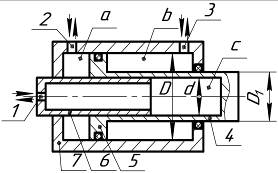
В случае двухступенчатого телескопического гидроцилиндра (гидроцилиндра двойного выдвигания) (рис. 10.2) внутренняя полость штока 3 диаметром  поршня 7 диаметром
поршня 7 диаметром  является цилиндром для поршня 6 диаметром
является цилиндром для поршня 6 диаметром 
 , шток 1 диаметром
, шток 1 диаметром  которого связан с нагрузкой.
которого связан с нагрузкой.
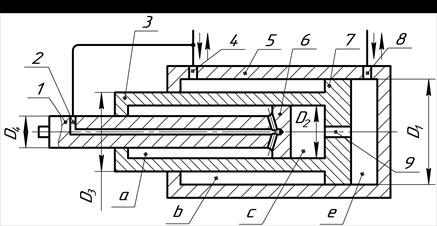
Рис. 10.2. Схема двухступенчатого (двойного выдвигания) телескопического гидроцилиндра
Для обеспечения прямого хода телескопического гидроцилиндра с толкающей силой рабочую жидкость расходом через отверстие 8 подают в бесштоковую полость  цилиндра 5 внутренним диаметром . Через отверстие 9 в донышке поршня 7 жидкость попадет также в бесштоковую полость цилиндра 3 внутренним диаметром
цилиндра 5 внутренним диаметром . Через отверстие 9 в донышке поршня 7 жидкость попадет также в бесштоковую полость цилиндра 3 внутренним диаметром  . Одновременно штоковые полости цилиндра 3 и цилиндра 5 соединяются со сливной магистралью через отверстия соответственно 2 и 4.
. Одновременно штоковые полости цилиндра 3 и цилиндра 5 соединяются со сливной магистралью через отверстия соответственно 2 и 4.
При начальном положении поршней 6 и 7, показанном на рис. 10.2, шток 3 не несет нагрузки – она прилагается к штоку 1. Поэтому после подачи рабочей жидкости через отверстие 8 поршень 7 переместится к столкновению с донышком поршня 6 вхолостую, при неподвижном поршне 6. После упора поршня 7 в поршень 6 они в дальнейшем будут перемещаться совместно.
Толкающая сила телескопического гидроцилиндра при общем перемещении поршней 6 и 7 при условии пренебрежения силой сливного давления жидкости и инерционной составляющей и давлением цилиндра  определяется зависимостью
определяется зависимостью
где  и
и  - рабочие площади поршней соответственно 7 и 6 в бесштоковых полостях и цилиндров соответственно 5 и 3.
- рабочие площади поршней соответственно 7 и 6 в бесштоковых полостях и цилиндров соответственно 5 и 3.
Скорость гидроцилиндра при прямом общем ходе поршней 6 и 7 составляет
 .
.
После столкновения поршня 7 с левой торцевой крышкой цилиндра 5, последующий прямой ход телескопического гидроцилиндра будет обеспечиваться лишь перемещением поршня 6 в цилиндре 3. В соответствии с этим толкающая сила и скорость прямого хода гидроцилиндра скачкообразно изменятся в соответствии с величинами
 ;
;
 .
.
Для обеспечения обратного хода телескопического гидроцилиндра с тянущей силой рабочую жидкость расходом через отверстия 2 и 4 подают соответственно в штоковые полости цилиндра 3 и цилиндра 5. Бесштоковые полости соответственно цилиндра 3 и цилиндра 5 через отверстия 9 и 8 соединяют со сливной магистралью.
Считая, что поршень 6 находится в контакте с левой крышкой цилиндра 3, тянущая сила гидроцилиндра сначала будет обеспечивать его обратное движение при общем перемещении поршней 7 и 6 в цилиндре 5, а после столкновения поршня 7 с правой торцевой крышкой цилиндра 5 начнет двигаться поршень 6 относительно цилиндра 3.
Тянущая сила телескопического гидроцилиндра при общем перемещении поршней 6 и 7 при условии пренебрежения силой сливного давления жидкости и инерционной составляющей определяется зависимостью
 ,
,
где  - рабочая площадь поршня 7 в штоковой полости цилиндра 5.
- рабочая площадь поршня 7 в штоковой полости цилиндра 5.
Скорость гидроцилиндра при обратном общем ходе поршней 6 и 7 составляет
 .
.
После столкновения поршня 7 с правой торцевой крышкой цилиндра 5, последующий обратный ход телескопического гидроцилиндра будет обеспечиваться перемещением поршня 6 в цилиндре 3. В соответствии с этим тянущая сила  и скорость обратного хода гидроцилиндра скачкообразно изменятся в соответствии с величинами
и скорость обратного хода гидроцилиндра скачкообразно изменятся в соответствии с величинами
 ;
;
 ,
,
где  - рабочая площадь поршня 6 в штоковой полости цилиндра 3; при условии пренебрежения площадью поперечного сечения канала 2 и радиальных сверлений в штоке 1
- рабочая площадь поршня 6 в штоковой полости цилиндра 3; при условии пренебрежения площадью поперечного сечения канала 2 и радиальных сверлений в штоке 1  .
.
Как для прямого, так и для обратного хода телескопического гидроцилиндра его мощность  определяется произведением силы на скорость
определяется произведением силы на скорость  гидроцилиндра в соответствии с (10.11).
гидроцилиндра в соответствии с (10.11).
Принцип действия и последовательность перемещения подвижных звеньев телескопического гидроцилиндра сохранятся и при числе цилиндров, больше двух (в многоступенчатых гидроцилиндрах).
10.3.2. Сдвоенные гидроцилиндры (тандем-цилиндры)
В сдвоенных гидроцилиндрах обеспечивается (почти) двойное увеличение силы и такое же уменьшение скорости цилиндра сравнительно с традиционными гидроцилиндрами с теми же параметрами рабочей среды при сохранении геометрических размеров поперечного сечения их конструктивных элементов и увеличении продольных габаритов.
Используют тандем-цилиндры как с односторонними (рис. 10.1, ж), так и с двусторонними (рис. 10.1, з) штоками.
Толкающая сила и скорость прямого хода тандем-цилиндра с односторонним штоком (рис. 10.1, ж)при давлении гидроцилиндра и расходе рабочей жидкости соответственно составляют

 ,
,
где и  - рабочие площади поршней соответственно в бесштоковой и штоковой полостях тандем-цилиндра.
- рабочие площади поршней соответственно в бесштоковой и штоковой полостях тандем-цилиндра.
Тянущая сила и скорость обратного хода тандем-цилиндра с односторонним штоком соответственно составляют

 ,
,
где и  - рабочие площади поршней в штоковых полостях соответственно и тандемного цилиндра.
- рабочие площади поршней в штоковых полостях соответственно и тандемного цилиндра.
Так как в тандем-цилиндрах с двухсторонним штоком (рис. 10.1, з) рабочие площади поршней во всех штоковых полостях , , и равны между собой = = = = ,то соответственно равны между собой толкающая и тянущая силы  и скорости прямого и обратного хода
и скорости прямого и обратного хода  и составляют
и составляют
 ;
;
 .
.
Как и в предыдущих случаях, мощность тандем-цилиндра определяется по зависимости (10.11) как произведение силы на скорость гидроцилиндра.
Тандем-цилиндры также распространены в гидроусилителях систем путейного управления машин (самолетов и др.), где нужно дублирование систем. Для обеспечения надежности работы гидросистем каждый из цилиндров имеет автономное питание рабочей жидкостью и управление.
10.3.3. Многоскоростные гидроцилиндры (со ступенчатым поршнем)
В гидроцилиндре со ступенчатым поршнем (рис. 10.1, к) возможно обеспечить три разных скорости и три разных толкающие силы при прямом ходе цилиндра и одну постоянную скорость и одну постоянную тянущую силу на обратном ходе.
В неподвижном корпусе 7 гидроцилиндра с неподвижным патрубком 6 размещен подвижной ступенчатый поршень 5 со штоком 4. Диаметр собственно поршня 5 составляет величину , штока 4 - , а поршня, образованного проточкой внутри штока 4 - . Отличием этого гидроцилиндра является наличие трех рабочих полостей , и и трех каналов 1, 2 и 3 для питания гидродвигателя рабочей жидкостью вместо двух, что имеет место в других рассмотренных конструкциях цилиндров.
При подаче рабочей жидкости в количестве только через канал 1 в полость скорость прямого хода гидроцилиндра имеет максимальное значение
 ,
,
где  - рабочая площадь поршня, образованного проточкой внутри штока 4, в полости ,
- рабочая площадь поршня, образованного проточкой внутри штока 4, в полости ,  .
.
Толкающая сила гидроцилиндра в этом случае минимально возможна и при давлении цилиндра составляет
 .
.
При подаче рабочей жидкости в количестве только через канал 2 в полость скорость прямого хода гидроцилиндра имеет среднее значение
 ,
,
где - рабочая площадь собственно поршня 5 в полости ,  .
.
Также среднее, из возможных, значение при такой схеме питания имеет толкающая сила гидроцилиндра
 .
.
При подаче рабочей жидкости в количестве одновременно через каналы 1 и 2 в полости и скорость прямого хода гидроцилиндра имеет минимальное значение
 ,
,
а толкающая сила гидроцилиндра – максимальное значение
 .
.
Обратное движение гидроцилиндра обеспечивается подачей жидкости через канал 3 в полость . При расходе жидкости скорость обратного хода
 ,
,
где - рабочая площадь собственно поршня 5 в полости ,  .
.
Тянущая сила гидроцилиндра при этом равняется
 .
.
Следует отметить, что для всех вариантов питания и хода гидроцилиндра его мощность остается неизменной и определяется зависимостью (10.11).
Многоскоростные гидроцилиндры используются преимущественно в металлообрабатывающих станках и прессах, где нужно обеспечить ускоренное подведение и отведение режущего инструмента, и медленный рабочий его ход.
10.3.4. Гидроцилиндры с увеличенной скоростью прямого хода
В случае необходимости увеличения скорости гидроцилиндра при его прямом ходе обеспечивается постоянное соединение штоковой полости с рабочей магистралью жидкости с давлением , а бесштоковую полость при этом попеременно соединяют с рабочей магистралью с давлением и сливной магистралью жидкости с давлением (как и выше, принимаем  ) (рис. 10.3).
) (рис. 10.3).
Для обеспечения обратного хода гидроцилиндра рабочую жидкость через распределитель 4 в количестве подают в штоковую полость цилиндра 2, а бесштоковую полость соединяют со сливной магистралью (рис. 10.3, а). Поршень 1 диаметром со штоком 3 диаметром двигаются влево.
а) б)
Рис. 10.3. Гидроцилиндр с увеличенной скоростью прямого хода
Скорость обратного хода и тянущая сила гидроцилиндра при этом определяются соответственно зависимостями
 ;
;
 ,
,
где  - рабочая площадь поршня 1 в штоковой полости цилиндра 2.
- рабочая площадь поршня 1 в штоковой полости цилиндра 2.
Для обеспечения прямого хода гидроцилиндра штоковую и бесштоковую полости цилиндра 2 через распределитель 4 соединяют между собой и с рабочей магистралью (рис. 10.3, б). Сливная магистраль отсекается от гидроцилиндра.
Так как рабочая площадь  поршня 1 в бесштоковой полости цилиндра 2 превышает рабочую площадь поршня 1 в штоковой полости цилиндра 2 на величину
поршня 1 в бесштоковой полости цилиндра 2 превышает рабочую площадь поршня 1 в штоковой полости цилиндра 2 на величину
 ,
,
то при равенстве давлений в бесштоковой и штоковой полостях в гидроцилиндре возникнет толкающая сила, которая равняется
 .
.
При этом поршень 1 со штоком 3 двигаются вправо.
Очевидно, что при прямом ходе в бесштоковой полости гидроцилиндра 2 расход рабочей жидкости составит  (
(  - расход жидкости из штоковой полости). Поэтому скорость прямого хода гидроцилиндра равняется
- расход жидкости из штоковой полости). Поэтому скорость прямого хода гидроцилиндра равняется
 . (10.12)
. (10.12)
Решив уравнение (10.12) относительно скорости прямого движения и приняв во внимание, что в этом случае внутренние перетекания жидкости отсутствуют и объемные потери гидроцилиндра определяются только внешними утечками, что позволяет принять допущение  , получим
, получим
 . (10.13)
. (10.13)
Таким образом, скорость прямого хода гидроцилиндра при рассмотренной схеме питания в  превышает аналогичную скорость цилиндра при традиционной схеме питания. Физически это объясняется при перемещении поршня 1 вправо тем, что жидкость с расходом , поступая в бесштоковую полость, занимает объем площадью поперечного сечения . Для рабочей жидкости расходом в бесштоковой полости „остается” объем площадью поперечного сечения
превышает аналогичную скорость цилиндра при традиционной схеме питания. Физически это объясняется при перемещении поршня 1 вправо тем, что жидкость с расходом , поступая в бесштоковую полость, занимает объем площадью поперечного сечения . Для рабочей жидкости расходом в бесштоковой полости „остается” объем площадью поперечного сечения  , что и обусловливает скорость прямого движения гидроцилиндра согласно выражению (10.13).
, что и обусловливает скорость прямого движения гидроцилиндра согласно выражению (10.13).
И в этом случае, при условии приемлемости допущения  и равенства объемных КПД
и равенства объемных КПД  гидроцилиндра при прямом и обратном ходах, мощность цилиндра, не зависимо от направления перемещения поршня, остается постоянной и определяется согласно (10.11).
гидроцилиндра при прямом и обратном ходах, мощность цилиндра, не зависимо от направления перемещения поршня, остается постоянной и определяется согласно (10.11).
Соответствующим подбором величин диаметров поршня и штока можно получить необходимые соотношения сил и скоростей движения гидроцилиндра. В частности, если площадь поршня в бесштоковой полости цилиндра  вдвое больше площади штока
вдвое больше площади штока  , то есть
, то есть  , что отвечает
, что отвечает  , то толкающая и тянущаясилы и скорости прямого и обратного ходов гидроцилиндра будут соответственно равны между собой.
, то толкающая и тянущаясилы и скорости прямого и обратного ходов гидроцилиндра будут соответственно равны между собой.
10.4. Отдельные конструктивные особенности гидроцилиндров
10.4.1. Гидроцилиндр с торможением
Возвратно-поступательные перемещения гидроцилиндрами деталей значительного веса, особенно в горизонтальной плоскости, сопровождаются ощутимыми силами инерции подвижных масс. Для избежания жесткого удара в конце хода цилиндра необходимо или ограничивать конечную скорость поршня (величинами, как правило, 0,1 м/с), или применять тормозные устройства для поглощения (демпфирования) кинетической энергии подвижной массы.
В одном из возможных конструктивных решений демпферного устройства гидроцилиндра (рис. 10.4) поршень 1 из одной или из обеих его сторон оснащается цилиндрическим выступом 2. При обратном (в соответствии с приведенной схемой, рис. 10.4) ходе гидроцилиндра цилиндрический выступ 2 достаточно герметично входит в камеру 5, перекрывая центральный сливной канал 7 и запирая перед концом хода цилиндра в сливной бесштоковой полости 3 некоторый объем жидкости. Скорость последующего движения поршня 1 до его полной остановки ограничена, поскольку опорожнение сливной бесштоковой полости 3 происходит через дроссель 6 и через радиальную щель (зазор) между боковыми стенками цилиндрического выступа 2 и камеры 5. В результате в сливной полости 3 повышается давление жидкости, которая тормозит движение поршня 1. Дроссель 6 предназначен для регулирования сопротивления проходного сливного канала 4, а, следовательно, и эффективности торможения подвижных элементов гидроцилиндра.
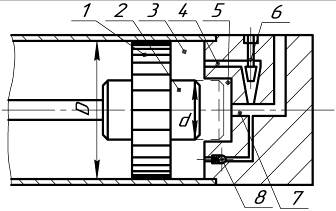
Рис. 10.4. Гидроцилиндр с торможением
В начале прямого хода гидроцилиндра, до выходу цилиндрического выступа 2 из камеры 5, рабочая жидкость подается в бесштоковую полость 3 по закону параллельных трубопроводов через обратный клапан 8 и дроссель 6. То есть на скорость прямого хода цилиндра дроссель 6 не влияет. После выхода цилиндрического выступа 2 из камеры 5 подача рабочей жидкости в бесштоковую полость 3 гидроцилиндра обеспечивается через центральный канал 7.
Длина пути торможения определяется, при прочих равных условиях, зависимостью изменения сопротивления дросселя 6 от расхода сливной жидкости.
Надежнее в работе гидроцилиндра является схема демпферного устройства, в котором радиальный зазор между боковыми стенками цилиндрического выступа 2 и камеры 5 полностью устранен применением уплотняющих элементов.
10.4.2. Гидроцилиндры с фальшивыми штоками
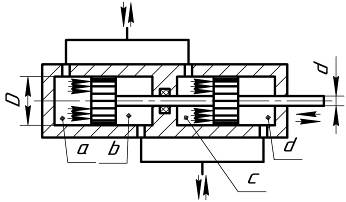
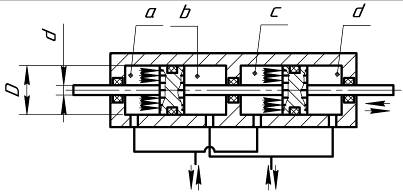
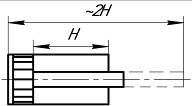
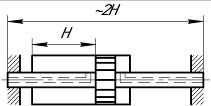
Если при работе гидроцилиндра двухстороннего действия с односторонним штоком необходимо иметь одинаковые толкающую и тянущую силы при неизменном давлении рабочей жидкости, или одинаковые скорости прямого и обратного хода при постоянном расходе жидкости, цилиндр оснащается вторым фальшивым, противоположно расположенным, штоком того же диаметра, что и силовой шток. Но такое техническое решение увеличивает продольные габариты гидроцилиндра, поскольку подвижные штоки выходят по обе стороны от неподвижного корпуса цилиндра (рис. 10.5)
Если для работы цилиндра с односторонним штоком при ходе  нужно пространство длиной
нужно пространство длиной  (рис. 10.5, а), то для цилиндра с двухсторонним штоком, хотя с одной стороны он фальшив, эта длина при тех же условиях будет равняться
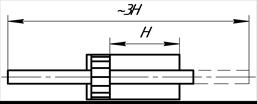
(рис. 10.5, а), то для цилиндра с двухсторонним штоком, хотя с одной стороны он фальшив, эта длина при тех же условиях будет равняться  (рис. 10.5, б). Однако, если в гидроцилиндре с двухсторонним штоком подвижным выполнить цилиндр, а неподвижным – поршень (рис. 10.5, в), то необходимая длина рабочего пространства будет равняться его длине при условии цилиндра с односторонним штоком, то есть .
(рис. 10.5, б). Однако, если в гидроцилиндре с двухсторонним штоком подвижным выполнить цилиндр, а неподвижным – поршень (рис. 10.5, в), то необходимая длина рабочего пространства будет равняться его длине при условии цилиндра с односторонним штоком, то есть .
а) б)
в)
Рис. 10.5. Схемы к определению габаритов гидроцилиндров
Дата добавления: 2016-04-14; просмотров: 6067;