Методы уменьшения систематических погрешностей.
Для уменьшения постоянной систематической погрешности наибольшее распространение получили следующие методы: введение поправок, метод замещения, метод компенсации погрешности по знаку.
Введение поправок является широко используемым методом исключения систематических погрешностей. Поправкой называют величину, которую надо прибавить к результату измерения с целью исключения систематической погрешности.
Метод замещения (метод разновременного сравнения) является одним из наиболее распространенных методов устранения большинства систематических погрешностей и заключается в том, что воздействие на измерительный прибор измеряемой величины заменяется эквивалентным, известным воздействием на прибор регулируемой меры. Измерение осуществляется в два этапа. При сохранении условий эксперимента неизменными за результат измерения принимается значение известной величины, определяемое по указателю переменной меры. Погрешность измерения при этом будет определяться погрешностью меры и случайной погрешностью измерительного прибора, умноженной на Ö2. Метод замещения широко используется для повышения точности измерения величин, для которых существуют точные регулируемые меры (например, при измерении сопротивлений, емкостей и др.).
Метод компенсации погрешности по знаку применяется для исключения известных по природе, но неизвестных по значению погрешностей, источники которых имеют направленное действие (погрешности от влияния магнитных полей, термоЭДС и др.). Для устранения таких погрешностей измерения проводят дважды (или четное число раз) так, чтобы систематическая погрешность входила в результаты измерений с противоположными знаками. Среднее значение из двух полученных результатов является окончательным результатом измерения.
Реализация этого метода может осуществляться двумя способами:
1) Изменением знака систематической погрешности при неизменном значении измеряемой величины (например, для исключения влияния внешнего магнитного поля на показания магнитоэлектрического прибора изменение знака погрешности достигают поворотом прибора на 1800).
Х = (Y1 + Y2)/2 = (Х + DС +Х - DС), (3.7)
где Y1 = Х + DС; Y2 = Х - DС - результаты двух измерений величины Х, содержащие систематическую погрешность DС, природа которой известна.
2) Инвертированием входного сигнала при сохранении знака и значения систематической погрешности (например, при измерении постоянного напряжения для исключения погрешности от термоЭДС производится повторное измерение при одновременном изменении полярности измеряемого напряжения). При этом результаты двух измерений Y1 и -Y2, содержащих систематическую погрешность, могут быть представлены в виде
Y1 = Х + DС; -Y2 = -Х + DС, (3.8)
где Х и (-Х) - значение измеряемой величины.
Окончательный результат измерения определяется по формуле 3.7.
5. Логометры: принцип действия, примеры конструкции приборов, основные соотношения, области применения.
Логометр - механизм приборов для измерения отношения сил двух электрических токов. Принцип действия Л. основан на том, что направленные встречно вращающие моменты, возникающие вследствие воздействия на подвижную часть Л. величин, входящих в измеряемое отношение, уравновешиваются при отклонении подвижной части на некоторый угол. Например, подвижную часть магнитоэлектрического Л. образуют две скрепленные под углом рамки, токи к которым подводятся через безмоментные спирали (рис.,а). Находясь в поле постоянного магнита, рамки стремятся повернуться в направлении действия большего момента, и подвижная часть отклоняется до тех пор, пока моменты не уравновесятся. Л. широко применяются в различных схемах для измерения электрических величин: ёмкости, индуктивности, сопротивления. Например, при использовании Л. в Омметре(рис., б) угол α, на который отклоняется подвижная часть Л., зависит только от отношения сил токов I1 и I2,
 ;
;
т. e. при постоянных r0 и r1 отклонение подвижной части пропорционально измеряемому сопротивлению; шкала Л. градуируется непосредственно в омах (ом). Широко распространены также Л. электродинамических и ферродинамических систем.
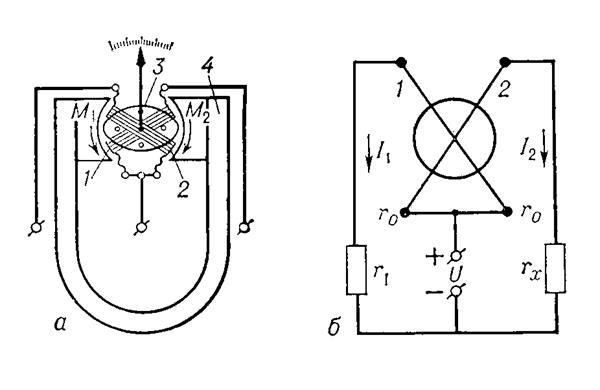
Устройство магнитоэлектрического логометра (а) и схема омметра с магнитоэлектрическим логометром (б): M1, M2 — вращающие моменты; l1, I2 — токи в цепях омметра; U — источник питания; r0 — сопротивление рамок логометра; r1 — омическое сопротивление; rx — измеряемое сопротивление; 1, 2 — рамки логометра; 3 — сердечник; 4 — постоянный магнит.
6. Цифровой вольтметр частотно-импульсного преобразования: принцип действия, структурная схема, основные соотношения, источник погрешности.
В этих вольтметрах измеряемая величина  предварительно преобразуется в пропорциональное ей значение частоты
предварительно преобразуется в пропорциональное ей значение частоты  . Затем частота непосредственно преобразуется в цифровой код. Таким образом, эти ЦВ относятся к вольтметрам прямого преобразования. Однако поскольку измерение частоты всегда производится за определенный интервал времени (
. Затем частота непосредственно преобразуется в цифровой код. Таким образом, эти ЦВ относятся к вольтметрам прямого преобразования. Однако поскольку измерение частоты всегда производится за определенный интервал времени (  ), эти вольтметры всегда являются интегрирующими. Интегрирование в них является аналоговым, а при необходимости аналоговый интегрирующий ЦВ может быть дополнен устройством усреднения.
), эти вольтметры всегда являются интегрирующими. Интегрирование в них является аналоговым, а при необходимости аналоговый интегрирующий ЦВ может быть дополнен устройством усреднения.
Обобщенная структурная схема ИЦВ реализующего частотно-импульсный метод преобразования имеет следующий вид:

Как видно из этой схемы, основными функциональными узлами ИЦВ являются преобразователь напряжение-частота (ПН-Ч) и цифровой частотомер. В ПН-Ч измеряемое напряжение преобразуется в частоту, причем
 ,
,
где  – коэффициент преобразования. Затем измеряется цифровым частотомером за время
– коэффициент преобразования. Затем измеряется цифровым частотомером за время  и его показания будут
и его показания будут
 .
.
При  показания частотомера N пропорциональны и получаем прямоотсчетный вольтметр.
показания частотомера N пропорциональны и получаем прямоотсчетный вольтметр.
В настоящее время известно большое число схем ПН-Ч. В зависимости от метода преобразования в все схемы подразделяются на две группы: с непосредственным преобразованием и с косвенным преобразованием. В пределах каждой группы могут быть реализованы схемы с разомкнутым и замкнутым контурами, а при необходимости расширения диапазона может быть применено преобразование частоты.
В ПН-Ч первой группы само непосредственно используется для формирования выходного сигнала частоты . Характерными представителями таких ПН-Ч являются преобразователи с циклическим интегрированием. В ПН-Ч второй группы влияет на параметр, определяющий частоту генератора с самовозбуждением (гармонического или релаксационного). Эти ПН-Ч имеют относительно невысокие метрологические характеристики. Поэтому основное применение получили ПН-Ч на основе интегрирующих звеньев с замкнутым контуром.
Причины погрешности:
-неидеальность интегратора
-порог чувствительности СУ
-нестабильность Uо
-нестабильность Ти
-стандартная погрешность дискретности
Дата добавления: 2016-04-06; просмотров: 2849;