Характеристики сил, действующих на судно при прямолинейном движении.
При прямолинейном равномерном движении на судно действуют две равные по величине и противоположно направленные силы: сила упора движителей (движущая сила) FД и сила сопротивления R.
FД = R; a= 0
При неустановившемся прямолинейном движении к этим двум силам добавляется сила инерции, компенсирующая алгебраическую разность этих сил.
При ускоренном движении судна, когда движущая сила FД больше силы R, сила инерции выступает в роли сопротивления, а при замедленном движении, когда движущая сила FД меньше силы сопротивления R, - в роли движущей силы.
FД > R ; FД < R; a  0 .
0 .
6.1.2. Характеристики сил, действующих на судно при криволинейном движении.
Криволинейное движение судна осуществляется с помощью соответствующей перекладки руля или поворотной накладки. При этом на руле возникает гидродинамическая сила руля Рр (рис. 6.1 ), которую можно разложить на продольную Рх, направленную параллельно диаметральной плоскости, и боковую (рулевую) Ру – перпендикулярную ей. Первая увеличивает силу сопротивления и тем самым уменьшает скорость движения судна, вторая – вызывает боковое перемещение судна в сторону своего действия и, кроме того, образует момент относительно центра тяжести (ЦТ), , который осуществляет первоначальный поворот судна с угловой скоростью ω1.
Мр = Ру Lк (6.1)
Рх = Рр · Cosα
Ру = Рр · Sinα
где Ру – составляющая гидродинамической силы руля по оси У;
Lк - расстояние (плечо) от ЦТ до точки приложения силы Рр;
α – угол перекладки руля.
Наличие бокового перемещения судна вызывает отклонение его вектора скорости V от ДП на угол дрейфа β (рис.6.1 ).
Угол дрейфа при криволинейном движении (β) есть угол между ДП судна и вектором линейной скорости его в данной точке криволинейного движения.
Боковое перемещение судна и поворот нарушают симметричность обтекания подводной части корпуса судна, и на нем возникает гидродинамическая сила RГ, направленная под определенным углом к диаметральной плоскости судна. Эту силу можно разложить на две составляющие: боковую RУГ (рис. 6.1 ) и
продольную RХГ . Сила RУГ направлена в сторону, обратную силе РУ, и, кроме того, создает вращающий момент относительно центра тяжести судна МГ.
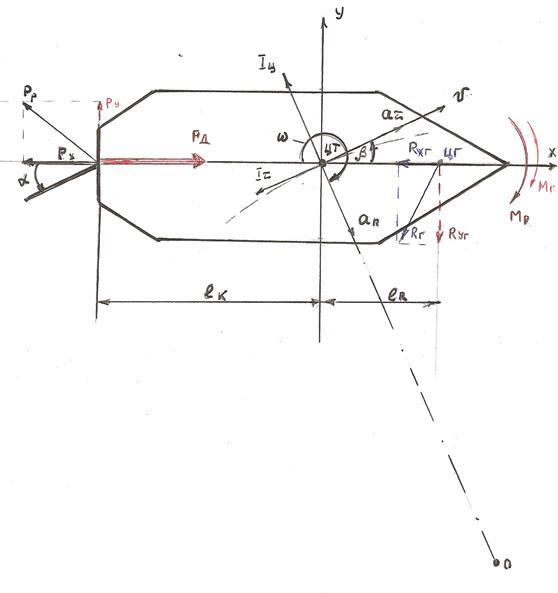
Рис.6.1 Силы, действующей на судно при криволинейном движении.
МГ = RУГ LR (6.2)
RХГ = RГ · Cosδ
RУГ = RГ · Sinδ
где RУГ – составляющая гидродинамической силы по оси У;
LR – расстояние (плечо) от центра приложения гидродинамических сил ( ЦГ) до ЦТ.
δ - угол между ДП и направлением действия гидродинамической силы РГ.
Момент МГ также осуществляет поворот судна с угловой скоростью ω2. Моменты МР и МГ в данном случае совпадают и создают суммарный поворачивающий момент МП , который будет осуществлять поворот судна с угловой скорость ω.
МП является алгебраической суммой моментов МР и МГ
МП = МР + МГ (6.3)
Составляющая RХ представляет собой силу, препятствующую движению судна.
По истечении некоторого времени после перекладки руля судно опишет криволинейную траекторию. При этом, как и у любого твердого тела, у него возникнут два ускорения: нормальное ап (центростремительное), направленное к центру кривизны траектории, и касательное аτ, совпадающее с линией вектора скорости V . При этом на судно будут действовать соответствующие силы инерции. Сила инерции IЦ (рис. 6.1 ), вызванная появлением нормального ускорения, будет пропорциональна этому ускорению и направлена в противоположную сторону. Она носит название центробежной силы инерции. Сила инерции Iτ, вызванная касательным ускорением, направлена в сторону, обратную этому ускорению.
Центробежная сила инерции IЦ будет действовать все время, пока судно движется по кривой, а сила Iτ– только при изменении скорости движения (на установившейся циркуляции, когда скорость движения постоянна этой силы не будет).
Дата добавления: 2016-03-04; просмотров: 1920;