БОРТОВЫЕ РАДИОЭЛЕКТРОННЫЕ СИСТЕМЫ 4 страница
§ автоматический радиокомпас - АРК-11;
§ центральная гировертикаль - ЦГВ-4;
§ пилотажный прибор - ПП-1ПМ;
§ курсовая система - КС-6;
§ система посадки - СП-50;
§ бортовое оборудование системы посадки - Курс-МП;
§ усилитель - У-20Н;
§ блок коммутации - БК-5;
§ блок реле - БР-37;
§ тумблер развода стрелок – ТРС.
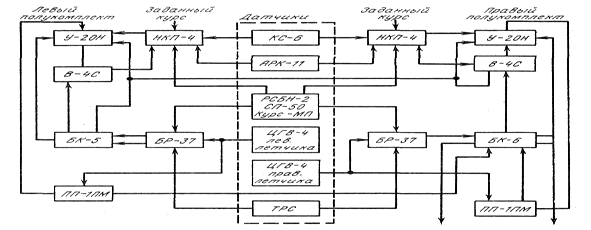 |
Рис. 9. Структурная схема пилотажно-навигационной системы Путь-4
При подготовках к полету у пилотажно-навигационной системы проверяется правильность индикации гироскопического, магнитного (истинного) и ортодромического курсов, работоспособность дистанционной передачи крена и тангажа, работоспособность командных стрелок продольного и бокового отклонений во всех режимах работы, работоспособность корректора высоты.
При периодических видах обслуживания с помощью проверочных пультов у пилотажно-навигационной системы проверяется скорость отработки и погрешность дистанционных передач курса, курсового угла радиостанции, угла сноса, крена, тангажа, заданного путевого угла, а также параметры, характеризующие работоспособность бокового и продольного каналов во всех режимах работы.
Система траекторного управления СТУ-154
 |
Система СТУ-154 предназначена для работы в составе автоматической бортовой системы управления АБСУ-154 самолетов Ту-154А и Ту-154Б.
Система служит для индикации основных пилотажно-навигационных параметров во всех режимах полета, а также для формирования и индикации команд директорного и автоматического управления и режиме захода на посадку по II категории IСАО.
Индикация пилотажно-навигационных параметров и команд управления осуществляется на показывающих навигационно-плановом приборе ПНП-1 и командно-пилотажном приборе ПКП-1. Показывающие приборы продублированы и располагаются в центральной части приборных досок левого и правого летчиков.
Формирование сигналов управления самолетом осуществляется вычислительным устройством, вырабатывающим командные сигналы для управления в боковой и продольной плоскостях.
Характерной особенностью каждого из каналов является наличие:
§ трехкратного резервирования вычислительной части,
§ непрерывного встроенного контроля работоспособности и сигнализации об исправности резервного канала,
§ тест-контроля контролирующей части канала и схемы формирования сигналов управления,
§ транзитной обработки навигационных сигналов с последующим выводом их на показывающие приборы и в систему автоматического управления (для командных сигналов).
Текущие навигационные параметры, а также сигналы управления и разовые команды для индикации и формирования законов управления поступают от точной курсовой системы ТКС-П2, малогабаритной гировертикали МГВ-1СК, доплеровского измерителя скорости и угла сноса ДИСС-ЗП, навигационно-вычислительного устройства НВУ-БЗ, автоматической бортовой системы управления АБСУ-154-2, радиотехнической системы посадки КУРС-МП-2 и автомата тяги АТ-6-2.
Параметры, индицируемые показывающими приборами системы СТУ-154:
§ крен текущий, тангаж текущий, курс текущий, заданный путевой угол, угол сноса, курс заданный (с использованием следящих систем);
§ отклонение от курсовой зоны посадочного маяка, отклонение от глиссадной зоны посадочного маяка (стрелочные указатели);
§ отклонение от заданной скорости, команда управления по тангажу, команда управления по крену (стрелочные указатели);
§ угол скольжения (указатель скольжения типа физического уровня);
§ сигнализация о связи СТУ-154 с системой посадки, радиомаяком VOR, навигационным вычислителем, системой ближней навигации (световая индикация включения режима);
§ дальность до маяка радиотехнической системы ближней навигации (цифровой указатель);
§ сигнализация о работе датчика текущего курса, глиссадного радиоприемника, курсового радиоприемника, исправность датчиков крена и тангажа, исправность бокового канала, исправность продольного канала (бленкеры отказа систем: отсутствие индикаторов в поле зрения летчика свидетельствует об исправности подсистем);
§ встроенный тест-контроль работоспособности указателя крена (контроль по показанию текущего крена после нажатия кнопки "Тест").
Структурная схема системы приведена на рис. 10.
Для оценки технического состояния системы выпускается штатная контрольно-проверочная аппаратура СТУ КПАП-1, позволяющая проводить проверки и регламенты, как в полевых, так и стационарных условиях авиационно-технической базы.
Для проверки входящих в систему блоков в условиях ремонтных предприятий и авиационно-технических баз выпускаются пульты-вставки ПВ-1 - ПВ-5, работающие в составе унифицированных стендов СИ-5.
В настоящее время проводится модернизация самолетов ТУ-154, на которые вместо устаревшей системы СТУ-154 устанавливается современный навигационный комплекс "Жасмин", приведенный ниже.
 |
Рис. 10. Структурная схема траекторного управления СТУ-154
Счисление и преобразование координат
В качестве основной системы координат АНК применяется упрощенная ортодромическая (плоская прямоугольная) система. При этом ось Оу этой системы (рис. 2) может совпадать или с ортодромией каждого прямолинейного участка (этапа) ЛЗП — частно-ортодромическая система, — или с ортодромией, соединяющей начало и конец всей ломаной ЛЗП — главно-ортодромическая система. Для выбора одной из систем на щитке управления НВ имеется переключатель «ГО-ЧО» (рис. 4).
Непрерывное счисление координат выполняется или непосредственным суммированием (интегрированием) линейных перемещений ΔSi самолета, получаемых подсчетом количества принятых периодов NД доплеровской частоты за время движения («Импульсное счисление»), или интегрированием путевой скорости по времени («Аналоговое счисление»).
Первый способ обеспечивает более высокую точность, так как применение импульсных счетчиков сокращает аппаратурные преобразования информации и связанные с ними погрешности (например, исключается вычисление путевой скорости). Поясним сущность импульсного счисления на очень упрощенном примере.
Предположим, что при работе ДИСС используется один луч, имеющий постоянный угол μ наклона к горизонту и расположенный в вертикальной плоскости, проходящей через вектор  (т. е. если антенная система развернута на угол сноса). При этом частотомер измеряет величину доплеровского сдвига частоты
(т. е. если антенная система развернута на угол сноса). При этом частотомер измеряет величину доплеровского сдвига частоты
где μ и λ — постоянные для данной установки ДИСС величины. Соответствующий период доплеровской частоты
Путь, проходимый самолетом за время ТД ,

т. е. не зависит от величины путевой скорости.
При движении самолета в течение времени Δt будет принято Nд = Δt/TД полных периодов и, следовательно, путь, пройденный за это время самолетом
Число Nд подсчитывается после преобразования непрерывных колебаний с частотой fд в последовательность коротких импульсов с периодом повторения Тд. Изменения W в полете вызывают изменение промежутков времени Тд между соседними импульсами, т. е. за то же время Δt будет принято новое количество периодов (импульсов) Nд'.
 |
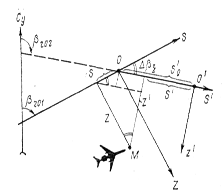
Рис. 11. Образование радиальных скоростей самолета Wp
В реальных ДИСС с четырехлучевой неподвижной антенной системой лучи расположены симметрично относительно продольной оси самолета и наклонены к плоскости горизонта под одинаковым углом μ (рис. 11). Разностные сигналы лучей 1 и 3, 2 и 4 дают доплеровские частоты fД1 и fД2, соответствующие лучам 1 и 2. Значения этих частот зависят только от радиальных скоростей сближения самолета с отражающими элементами s1 и s2 земной поверхности, т. е. от проекций путевой скорости самолета W на эти лучи — Wp1 и Wp2,
Fд1=2Wp1/l и Fд2=2Wp2/l,
где λ — длина волны передатчика ДИСС. Но так как
Wp1=Wcos(ψл+a)cosm;
Wp2=Wcos(ψл-a)cosm,
то
где  — постоянная для данной установки ДИСС величина.
— постоянная для данной установки ДИСС величина.
Иначе
откуда

где Wnp = Wcosα и W6 = Wsinα — продольная (по оси самолета и боковая составляющие путевой скорости. Тогда
Найдем зависимость проекций Ws и Wz путевой скорости на оси ЧО-системы координат от принимаемых доплеровских частот fДl и fД2 (рис. 12):
 |
Рис. 12. Разложение скоростей при счислении координат

Подставив сюда выражения для Wnp и W6 через fД1 и fД2, получим:

За конечный малый промежуток времени τ (например, 0,1 сек) приращения координат по осям S и Z составят:

Произведения типа fд1τ и fд2τ представляют собой числа N1 и N2 периодов доплеровской частоты, принимаемые по лучам 1 и 2 (рис. 8) за промежуток времени τ, т. е. с учетом умножения на соответствующие тригонометрические множители и на общий постоянный коэффициент за скобками дают некоторые части приращений координат ΔSi и ΔZi за этот промежуток времени.
Решение формул в навигационном вычислителе ведется циклами продолжительностью tЦ ≈ 0,4 сек. В течение одного цикла параллельно определяются приращения ΔS и ΔZ координат.
Цикл состоит из четырех тактов (I, II, III и IV) по 0,1 сек. В течение каждого такта формируется по одному из четырех членов каждой формулы, т. е. какая-то часть приращений координат ΔSI и ΔZI ΔSII и ΔZII и т. д. Таким образом, за один цикл (четыре такта) подсчитывается примерно 1/4 расстояния, пройденного самолетом по осям S и Z. Это учитывается при дальнейшем прохождении информации в вычислителе.
Упрощенная схема решения задачи счисления импульсным методом представлена на рис. 13.

Рис. 13. Блок-схема (упрощенная) счисления координат импульсным методом
По сигналам синхронизирующего устройства вычислителя с ДИСС на вход измерительной схемы через переключатель П1 поочередно подаются частоты fД1 (в тактах II и IV) и fД2 (в тактах I и III) в виде последовательностей стандартных импульсов.
В результате в тактах I и III (за 0,1 сек) в схему поступит определенное число импульсов — N2 = fД2τ, а в тактах II и IV — N1 = fД1τ.
В такте I со схемы «Формирование временного строба» в устройство «Умножение на строб» подается сигнал, представляющий собой временной строб продолжительностью τ cos (γ — βЗ), ограничивающий время подсчета импульсов fД2 частью промежутка τ, в результате чего на выходе схемы получается величина fД2 τ cos(γ — β3). Эта величина через переключатель П3 поступает на реверсивный счетчик импульсов канала S, где преобразуется в последовательность импульсов, управляющих шаговым двигателем ШДS.
Ось шагового двигателя поворачивается на угол, соответствующий величине принятого сигнала; угол поворота оси двигателя через сельсинную следящую систему передается на счетчик индикатора координаты S.
Одновременно в такте I число импульсов N2 cos(γ — β3) со схемы «Умножение на строб» поступает в схему «Умножение на ctg ψЛ», откуда число импульсов N2cos(γ — β ) ctg ψЛ подается на реверсивный счетчик канала Z и далее, преобразуясь в шаговом двигателе в приращение координаты Z, через вторую сельсинную передачу — на счетчик индикатора координаты Z. Так формируется первый член формулы для ΔZ.
В такте II переключается П1, в результате чего из ДИСС поступает число импульсов N1 =fД1τ, которые далее проходят через схему так же, как и N2 в такте I (так как переключатель П3 положения не изменил). В этом такте подсчитываются вторые члены формул.
В такте III переключатель П1 возвращается в положение такта I, а переключатели П2 и П3 переходят в положения III, IV. При этом из схемы «Формирование временного строба» поступает временной строб τ sin(γ — β3) и умножение на ctg ψЛ производится в канале 5. В такте III формируются третьи члены формул.
В такте IV переключается только П1 и формируются четвертые члены.
Итак, в течение tЦ каждого цикла на счетчиках S и Z обновляется информация о текущих координатах самолета.
Необходимая для получения временных стробов величина γ — β3 вырабатывается по текущему курсу у, поступающему из ТКС, и путевому углу β3 ортодромического участка ЛЗП, вводимому вручную в задатчик-индикатор путевого угла (рис. 5).
Аналоговый метод счисления координат в АНК — вспомогательный, применяется при отказах доплеровского датчика для продолжения счисления координат по воздушной скорости (от СВС) и запомненному или введенному вручную ветру.
Счисление координат в главно-ортодромической системе выполняется на тех же элементах АНК аналогично счислению в частно-ортодромических координатах.
Как при импульсном, так и при аналоговом счислении положение продольной оси Оу системы координат (при счислении в ГО) или оси S (при счислении в ЧО) задается установкой на одном из задатчиков путевых углов 5 (рис.5) ортодромического путевого угла, соответствующего выбранному опорному меридиану (относительно которого отсчитывается курс, и на счетчиках координат самолета (1 или 2) — фактических координат х0 и у0 (или Z0 и S0) самолета в момент включения счисления.
На сигнальных лампочках счетчиков верхней пары в зависимости от выбранной системы координат (ГО или ЧО) подсвечиваются буквенные обозначения х и у (или Z и S).
Одновременно с основным счислением текущих координат самолета в ГО- или ЧО-системе навигационный вычислитель обеспечивает их преобразование.
 |
Рис. 14. Преобразование ГО-координат самолета в ЧО-координаты
Для преобразования главно-ортодромических координат х и у в частно-ортодромические Z и S относительно отрезка O'S ЛЗП, по которому летит самолет (текущий участок ломаной ЛЗП), необходимо задать параметры новой системы относительно исходной: координаты х0' и y0' - начала (очередного ППМ ломаной ЛЗП) и заданный путевой угол βЧО оси O'S (рис. 14). Связь между новыми («преобразованными») и исходными («счисленными») координатами устанавливается из рис. 14, если учесть, что продольные координаты у, у0' и S находятся в области отрицательных значений, а ΔβЗ = βЧО— βГО:
-S=-(y-yO’)cosΔβЗ+(xO’-x)sinΔβЗ,
или
S=(y-yO’)cosΔβЗ+(x-xO’)sinΔβЗ;
Z=-(y-yO’)sinΔβЗ+(x-xO’)cosΔβЗ.
Преобразованные координаты Z и S используются для управления самолетом по текущему боковому уклонению самолета от ЛЗП и для определения момента подхода к ППМ.
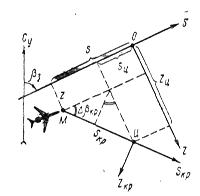
Преобразование частно-ортодромических координат Z и S в частно-ортодромические координаты Z' и S' следующего участка ЛЗП выполняются по формулам, получаемым на основании рис. 15:
-S’=-S’O-[ZsinΔβЗ-(-ScosΔβЗ)];
S’=S’O+ZsinΔβЗ-ScosΔβЗ;
Z’=-SsinΔβЗ+ZcosΔβЗ.
Как видно из последней формулы, для определения преобразованной координаты Z' по счислимым Z и S достаточно ввести в НВ только величину ΔβЗ.. Для определения же преобразованной координаты S' (оставшегося расстояния до следующего ППМ) необходимо, дополнительно задать S'о — длину следующего этапа пути. Постоянное наличие преобразованных координат Z' и S' позволяет в любой момент перейти от стабилизации самолета на текущем участке ЛЗП к выходу на последующий и стабилизации самолета на нем. Переход к полету к следующему участку ЛЗП, включая определение момента начала разворота (на удалении SУP от ППМ), выполняется автоматически.
Текущие координаты самолета преобразуются также с целью выработки параметров навигационного режима для полета по кратчайшему расстоянию в заданную точку — требуемого путевого угла βкр и кратчайшего расстояния Sкр.
| 
|
| Рис. 15. Преобразование ЧО-координат в ЧО-координаты другого этапа ЛЗП | Рис. 16. Схема решения задачи «КР» при счислении в ЧО координатах |
Формулы преобразования в случае счисления в ГО-системе координат получаются, если положить:
xO'=xЦ, yO’=yЦ, Z=0, Δβ3=ΔβКР;
SКР=(y-yЦ)cosΔβКР+(x-xЦ)sinΔβКР;
0=-(y-yЦ)sinΔβКР+(x-xЦ)cosΔβКР.
При включенном режиме «КР» (рис. 4) по этим формулам непосредственно получаются текущие значения SКР и ΔβКР, где ΔβКР — необходимая поправка к программному значению путевого угла βЗ для получения βКР. Величина βКР=β3 + ΔβКР автоматически отрабатывается на «свободном» (т. е. неиспользуемом в данный момент для счисления) задатчике-индикаторе ПУ 5 (рис. 5), а величина SКР—на «свободном» счетчике координаты S самолета (1 или 2).
При счислении в ГО-системе βКР используется для автоматического полета методом управления навигационным режимом с определением (в данном случае) рассогласования между требуемым βКР и фактическим путевым углом β = γ + α, которое затем приводится к нулю. Величина SКР используется для контроля пути по дальности и регулирования скорости полета в соответствии с располагаемым временем tрасп.
Если счисление ведется в ЧО-системе координат, то значения ΔβКР и SKP получаются на основании рис. 16:
SКР=(S-SЦ)cosΔβКР+(Z-ZЦ)sinΔβКР;
0=-(S-SЦ)sinΔβКР+(Z-ZЦ)cosΔβКР.
Соотношения по структуре одинаковы с предыдущими выражениями, поэтому решаются с помощью тех же вычислительных устройств, а результаты выдаются также на задатчике-индикаторе ПУ и счетчике координаты S.
По этим βКР и SKР строится новый ЧО-участок ЛЗП, на него принудительно переводится счисление и затем выполняется полет методом непосредственной коррекции координаты Z.
Навигационный вычислитель АНК обеспечивает также преобразование высоты полета в параметры управления движением самолета в вертикальной плоскости — разность фактической H и программной H3 высот или угол θ снижения, определяемый соотношением
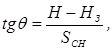
где Н — текущая высота, Н3 — конечная высота, на которую необходимо выйти с расстояния SCH. Эти параметры могут быть использованы в САУ для выработки пилотажных команд, индицируемых на позиционных или директорных приборах.
Оптимизация (коррекция) счисленных координат
В АНК с аналоговым вычислителем применяется, как правило, простейший способ оптимизации координат самолета — автоматизированная коррекция с использованием РСБН (неавтономная коррекция) или МНРЛС (автономная коррекция).
При ручной (неавтоматизированной) коррекции значения координат МС, полученные любым способом (от наземной РЛС, визуальным наблюдением и др.), предварительно переводятся в основную систему координат АНК, в которой ведется счисление — х и у или Z и S, а затем вручную устанавливаются на «рабочих» счетчиках.
При автоматизированной коррекции сравниваются полученное независимым методом МСнез и счисленное МССЧ, вырабатываются и индицируются рассогласования ΔZ = ZНЕЗ — ZCЧ и ΔS = SНЕЗ — SCЧ (или ΔХ и ΔY) между их координатами, по полученным данным принимается решение о целесообразности коррекции и корректирующие поправки ΔZ, ΔS (или ΔХ, ΔY) передаются на рабочие счетчики. Определение корректирующих поправок, их наглядная индикация, а также ввод (после принятия решения) в счетчики осуществляются автоматически. Логическая часть задачи выполняется экипажем, принимающим решение о возможности коррекции в зависимости от степени доверия к координатам, полученным независимым методом, по сравнению со счисленными.
Принцип коррекции ЧО-координат при использовании системы РСБН (или зарубежных маяков VOR/DME) рассмотрим по рис. 16.
 |
Рис. 17. Коррекция координат по данным РСБН
Исходными данными для решения задачи коррекции являются: ЧО-координаты Sp и Zp радиомаяка, подготовленные при программировании полета; заданный путевой угол βИЗ ЛЗП относительно истинного меридиана радиомаяка, также определяемый при программировании; измеренные системой РСБН во время полета истинный пеленг АC и наклонная дальность DH самолета относительно радиомаяка; текущая барометрическая высота полета H, поступающая от СВС и принимаемая приближенно отнесенной к уровню радиомаяка. Связь между этими величинами и текущими точными ЧО-координатами S и Z самолета устанавливается по рис. 17, а с учетом соотношения между DH, H и μ согласно рис. 17, б:
S-SP=-DH cosm cosAPS;
Z-ZP=-DH cosm sinAPS,
или
(S-SP) secm=-DH cosAPS;
(Z-ZP) secm=-DH sinAPS,
где АPS = АC + 180° — βИЗ — условный пеленг радиомаяка относительно частно-ортодромической оси S, принимаемой за условный меридиан. Инструментовка этих формул производится при помощи нескольких электромеханических (аналоговых) следящих систем, связывающих выходную схему РСБН (АC, DH), ручные задатчики ИЗПУ (βИЗ) и ЧО-координат радиомаяка (Sp, Zp), датчик высоты СВС (H), а также специальную схему отработки угла μ, по измеренным текущим DH и H.
Расхождения между счисленными (ZCЧ, SCЧ) и полученными согласно формуле точными (радиотехническими) координатами Z и S для наглядности индицируются на специальном индикаторе (рис. 7, а), если переключатель находится в положении «Индикация»:
ΔZ=Z-ZСЧ;
ΔS=S-SСЧ,
После принятия решения на коррекцию установкой переключателя в положение «Коррекция» поправки ΔZ, ΔS вводятся на рабочие счетчики текущих координат самолета и приводят их показания к точным (корректированным) значениям. Изменения показаний счетчиков вызывают управляющее воздействие на самолет со стороны САУ, приводящее к маневру самолета до достижения нулевого показания Z.
При режиме счисления в ГО-системе координат процесс коррекции аналогичен изложенному, но в НВ вводятся не SP и ZP, а ГО-координаты yP и хP радиомаяка, а на индикаторе поправок отрабатываются значения Δу и Δх, по которым экипаж может судить о возможности выполнения коррекции.
При коррекции с помощью БРЛС используется радиолокационный ориентир (РЛО) с точно определенными при программировании ЧО-координатами. Для наглядного сравнения МСНЕЗ с МССЧ из НВ в БРЛС поступают текущие значения курсового угла ψCЧ и наклонной дальности DНCЧ ориентира, вычисленные по текущим счисленным координатам самолета и запрограммированным координатам РЛО. По ψCЧ и DHCЧ на экране индикатора БРЛС строится электронное перекрестие. Несовпадение изображения РЛО с перекрестием означает расхождение между МСНЕЗ и МССЧ. Ручное наложение перекрестия на изображение РЛО с помощью механизма управления перекрестием (рис. 7, г) позволяет определить поправки к ψCЧ и DHCЧ, а следовательно, и их исправленные значения ψРЛО и DНРЛО, по которым сначала вычисляется условный пеленг РЛО (относительно ЛЗП)
AРЛО S=ψРЛО+γ-βИЗ, а затем определяются и корректированные координаты S и Z самолета. Как и при использовании РСБН, величины корректирующих поправок ΔS и ΔZ индицируются на индикаторе поправок.
Кроме оптимизации координат, АНК позволяет при обнаружении систематических боковых ошибок счисления осуществить также коррекцию курсовой системы, для чего используется «блок дискретных поправок» (БДК).
Вопросы студентам:
1. Какие системы САУ работают с аналоговым АНК?
2. Чем отличаются САУ: АБСУ-134А, КА-142, СТУ-154?
3. Какие задачи решает комплекс Путь-4?
4. Какие виды счисления применяются в аналоговых АНК? Какие точнее?
5. Объясните сущность применения ДИСС при счислении.
6. Как вычисляются радиальные скорости самолета?
7. Опишите работу блок – схемы счисления координат импульсным методом.
8. Как преобразуются ГО в ЧО координаты?
9. Как решается задача полета по КР при счислении в ЧО-координатах?
10. Какие виды коррекции применяются в аналоговых АНК? Сравните их точности.
Лекции 9,10,11,12,13.
Режимы управления самолетом
При реализации навигационных решений в полете с АНК возможно несколько режимов управления самолетом: в горизонтальной плоскости — «Основной», «Кратчайшее расстояние», «Курсовая стабилизация» и управление по курсовой зоне посадочного радиомаяка; в вертикальной плоскости — «Вертикальный маневр» и режим управления по радиоглиссаде.
В зависимости от конкретной навигационной обстановки различные сочетания этих режимов позволяют выполнять необходимые маневры.
Дата добавления: 2016-02-09; просмотров: 1619;