БОРТОВЫЕ РАДИОЭЛЕКТРОННЫЕ СИСТЕМЫ 3 страница
Представление о степени искажения результатов расчетов при замене сферических треугольников плоскими дает теорема Лежандра, согласно которой углы плоского треугольника со сторонами, равными сторонам сферического, будут уменьшены на 1/3 сферического избытка («эксцесса») данного сферического треугольника:
где SΔ — площадь сферического или, приближенно, плоского треугольника, a R — радиус земного шара. Например, при рассмотрении правильного треугольника со сторонами D — 500 км

а при сторонах D = 1000 км — ΔА = 12'.
В основе счисления координат по формулам прямолинейной тригонометрии лежит использование упрощенной ортодромической системы координат с таким выбором главной ортодромии (оси Оу), чтобы ЛЗП на всех этапах проходила с возможно меньшими отклонениями от нее. В этих условиях точные («сферические») формулы счисления ортодромических координат при использовании ортодромического датчика курса принимают вид:
где βу — текущий условный путевой угол, βку — условный «угол карты» (заданный путевой угол главной ортодромии).
Применение в АНК упрощенных формул для счисления координат приводит к методическим ошибкам тем большим, чем больше фактические значения координаты х отличаются от нуля, т. е. при полете по маршрутам, не совпадающим с главной ортодромией. Нетрудно заметить, что при полете по ортодромическим меридианам, т. е. перпендикулярно главной ортодромии (βу — βку = 90°), методическая ошибка отсутствует (так как cos(βy — βку) = 0); наибольшей она будет при полетах с направлениями, близкими к главной ортодромии, но на некотором удалении от нее, когда угол βу — βку близок к нулю. Известны расчеты, на основании которых можно показать, что неучет сферичности Земли в полете по ЛЗП, параллельной в начальной точке главной ортодромии, приводит к относительным радиальным ошибкам счисления МС, определяемым выражением
где S — пройденный путь, х0 — начальное удаление от главной ортодромии, выраженное в радианах (долях радиуса Земли). Например, при S = 500 км = 0,079 рад и х0 = 200 км — 0,031 рад относительная ошибка МС r/S = 0,0013, а при х0 = 100 км — r/S = 0,0006.
Однако в условиях полетов гражданской авиации для конкретного заданного маршрута всегда можно выбрать такое положение главной ортодромии, чтобы полет все время проходил вблизи нее, т. е. при малых значениях х, и тем самым практически исключить ошибки счисления, связанные с применением упрощенных формул. Даже в случаях возникновения в полете необходимости резко изменить маршрут в сторону от главной ортодромии современные АНК обеспечивают возможность оперативного перехода на счисление в системе координат, связанной с новой главной ортодромией, т. е. в области малых значений координаты х.
Другая часть вычислительных операций, выполняемых АНК, представляет собой преобразования для перевода координат самолета, определенных различными независимыми методами, в координаты основной системы данного АНК, что необходимо для сравнения их со счисленными или с программными координатами.
В зависимости от применяемых средств (систем) независимого определения МС исходные координаты выражаются в разных системах: географической, биполярной (двуазимутальной), полярной сферической, гиперболической и др. При этом возможен как непосредственный переход от исходных координат к основным, так и через координаты промежуточной системы. Например, гиперболические координаты, определяющие положение МС относительно двух баз станций, могут быть предварительно пересчитаны в географические координаты или в сферические полярные относительно ведущей станции РДНС (ρ, θ), а затем уже в основную систему АНК — ортодромическую.
Применение упрощенных аналитических зависимостей (формул прямолинейной тригонометрии) при координатных преобразованиях допустимо, как правило, только при определении МС с помощью радионавигационных средств (систем) ближнего действия (БРЛС, УДНС ближней навигации), когда опорные ориентиры, используемые при определении МС, удалены от фактического места самолета и от ЛЗП не более чем на 300—350 км. В этих случаях сферические треугольники могут решаться как плоские с такими же сторонами и углами. Возможные при этом ошибки могут быть оценены с помощью теоремы Лежандра.
Вопросы студентам:
1. Каковы основные проблемы современной воздушной навигации. Как они решаются? Приведите примеры.
2. Как решаются задачи в АНК? В чем сущность метода непосредственной коррекции и метод управления навигационным режимом, чем они отличаются?
3. Чем обусловливаются навигационные возможности комплекса?
4. Что такое основная система координат АНК? Какие системы координат применяются в аппаратуре, входящей в АНК? Что такое ГО и ЧО?
5. Что такое сферическая система координат? Что делается для уменьшения ошибки представления геоида в виде сферы?
6. По каким формулам производится счисление ортодромических координат?
7. Как и для чего выбирается ГО? Для чего используется ЧО?
Лекция 5.
Способы оптимизации навигационной информации
Оптимизация исходных навигационных данных (текущих координат и навигационных элементов движения) состоит в том, что из нескольких значений одной и той же величины, полученных с помощью различных датчиков, но относящихся к одному моменту времени, формируется новое, более точное значение этой величины. При этом решение вопроса о том, какое значение измеряемой величины является наиболее точным, т. е. наивероятнейшим, возможно только на основе учета вероятностных характеристик исходных сигналов.
В принципе схема наиболее полной оптимизации состоит в том, что сначала оценивается степень доверия к сигналу каждого отдельного датчика, а затем с учетом этой оценки из всех сигналов составляется такое новое значение измеряемой величины, чтобы оно удовлетворяло некоторому выбранному критерию оптимальности. Критерием оптимальности может служить, например, минимум средней квадратической ошибки искомой навигационной величины.
Сложность оценки каждого из составляющих сигналов заключается в том, что в процессе полета их вероятностные характеристики непрерывно меняются: ошибки АВК растут с увеличением времени полета, ошибки радионавигационных линий положения и МС изменяются в зависимости от удалений от наземных станций систем и других геометрических и физических факторов и т. д.
В настоящее время на основе накопленного опыта автоматизации навигации летательных аппаратов и морских судов разрабатывается общая теория оптимальной обработки навигационных сигналов, имеющая целью обеспечить рациональные алгоритмы получения наивероятнейших значений, как отдельных навигационных величин, так и текущих МС, используемых для навигационного управления самолетом.
При правильной обработке данных точность оптимизированного значения навигационной величины выше наиболее высокой точности исходных величин. Однако осуществление наилучшего способа оптимизации требует сложной бортовой аппаратуры и обеспечивается только при использовании цифровых вычислительных машин. Поэтому в наиболее распространенных в гражданской авиации АНК, имеющих вычислители аналогового типа, задачи оптимизации определения МС решаются упрощенным полуавтоматическим путем, при котором оценка достоверности информации от различных датчиков выполняется штурманом (пилотом), после чего к вычислителю АНК подключается тот датчик координат (параметров), который считается в данных условиях полета наиболее точным. Оптимизация, осуществляемая простой заменой данных менее точного датчика данными более точного, получила название коррекции навигационных данных. Примерами полуавтоматической оптимизации являются периодические коррекции показаний курсовых систем для устранения накапливающейся погрешности курса от собственного ухода гирополукомпасов (режимы «МК» и «АК») или коррекция счисленных координат МС по данным УДНС, БРЛС и других датчиков.
При коррекциях средняя точность оптимизированного результата не может превысить точность данных используемого корректирующего датчика, приближаясь к ней лишь при идеальном выполнении вычислительных операций. Это объясняется тем, что при таком способе оптимизации информация от менее точного (менее достоверного) датчика, будучи просто отброшенной, не учитывается в конечном результате и, следовательно, не используется для повышения его точности.
Устройства управления, индикации и сигнализации
Устройства управления, индикации и сигнализации (УУИС), несмотря на различия их индивидуальных функций, имеют в структуре АНК общее назначение — обеспечивать экипажу возможность активного управления процессом подготовки и выполнения полета на всех его этапах, как при использовании автоматического канала комплекса, так и при частичном или даже полном нарушении его работоспособности. В последнем случае навигация должна осуществляться неавтоматизированными способами на основе информации от отдельных датчиков комплекса или дополнительных («аварийных») навигационных приборов.
Устройства УУИС занимают в современной воздушной навигации особое место, являясь связующим звеном между человеком и автоматом, так как без специальных устройств человек не смог бы воспользоваться всей навигационной информацией, собираемой на борту самолета в результате работы многочисленных приборов.
К группе УУИС относятся:
§ пульты управления всеми входящими в АНК датчиками навигационной информации, центральным вычислителем и индикаторами;
§ индикаторные приборы, входящие как в состав отдельных ДНИ, так и общие для всего комплекса;
§ навигационные сигнализаторы, расположенные на пультах отдельных датчиков, пультах управления АНК и на специальном табло навигационной сигнализации (ТНС).
Пульты управления (ПУ) обеспечивают включение в работу всех составных частей АНК, их предварительную и предполетную проверку, ручной ввод исходных (или текущих) данных при программировании полета на земле и в воздухе, переключение режимов работы отдельных систем комплекса и всего комплекса в целом. В современных навигационных пультах преобладают органы управления дискретного типа — селекторные переключатели и кнопки ввода цифровых параметров (вместо рукояток и плавных шкал), упрощающие работу оператора.
Индикаторные приборы (навигационные индикаторы) являются источниками всей информации, поступающей в распоряжение экипажа в полете. Особенностью требований к индикатору в составе АНК является сосредоточение всей необходимой информации на возможно меньшем количестве объектов наблюдения (шкал, счетчиков, экранов) в кабине экипажа и обеспечение оперативного (немедленного) доступа к любому потребовавшемуся элементу информации. При этом должна достигаться предельная ясность индицируемого содержания, исключающая какое-либо перекодирование данных для их осмысливания и дальнейшего использования. Для сокращения общего числа наблюдаемых приборов индикаторы в АНК выполняются совмещенными и даже многофункциональными, т. е. на одни и те же указатели (шкалы, стрелки, цифровые и знаковые указатели) вызываются в зависимости от необходимости разные параметры. На одном указателе может последовательно индицироваться до 20 различных величин. Таким образом, в течение основного времени полета на индикаторах можно иметь только те параметры, по которым непосредственно контролируется полет (например, боковое отклонение от ЛЗП, оставшееся расстояние до ППМ), а параметры, используемые периодически, вызываются на короткое время, не отвлекая внимание экипажа на протяжении всего остального полета.
Известны несколько типов многофункциональных («интегральных») навигационных индикаторов:
§ стрелочно-шкальные совмещенные указатели нескольких параметров (например, плановые навигационные приборы ПНП), на которых одновременно индицируются курс, угол сноса, заданный путевой угол, курсовые углы двух радиомаяков (радиостанций), величина отклонения от ЛЗП и некоторые сигналы;
§ цифровые индикаторы, указывающие одновременно один или два параметра, но позволяющие последовательно вызывать до 10 и более параметров (пар параметров), например цифровые указатели φ и λ, z и S и т. д.;
§ картографические индикаторы с движущейся рулонной картой;
§ проекционные индикаторы навигационной обстановки (ПИНО), позволяющие непрерывно наблюдать положение текущего МС на фоне движущегося картографического изображения местности, некоторые элементы движения самолета (β, W) и внешней обстановки, а также, по вызову,— таблицы с различными справочными данными (схемами захода на посадку, радиоданными, инструкциями по проверке аппаратуры). Этот тип индикаторов, использующих оптический или электронный проекционный экран, в настоящее время все чаще рассматривается как основное средство контроля со стороны экипажа за автоматическим полетом самолета, особенно при отсутствии на борту штурмана.
Для успешного автоматизированного управления самолетом экипаж, кроме основной навигационной информации, нуждается также в индикации ряда признаков работы самого АНК: работоспособности его датчиков и вычислителя, фактически осуществляемого этапа программы, режима работы комплекса и другой вспомогательной информации. Это связано, прежде всего, с тем, что внимание экипажа, освобожденное от непрерывного наблюдения за множеством отдельных приборов, должно своевременно привлекаться к тому из них, в работе которого возникли какие-либо ненормальности или показания которого приближаются к некоторым контрольным (или нежелательным) значениям. Кроме того, автоматика АНК в ряде случаев может решать не только чисто вычислительные задачи, связанные с измерением, оптимизацией и индикацией различных навигационных величин и команд, но и логические задачи, связанные с переходом к очередному этапу программы или с оптимальной самоорганизацией комплекса. В результате этого АНК «самостоятельно» разворачивает самолет или изменяет режим своей работы, заменяет датчики исходной информации, выдает экстренные команды на автопилот. Чтобы своевременно обратить внимание экипажа на все изменения в состоянии датчиков и вычислителя АНК и на автоматические изменения режима управления самолетом, применяются визуальные сигнализаторы, выполненные, как правило, в виде светящихся ламп с определенным текстом: «Память», «Отказ НВ», «Отказ азимута», «Проверь коорд РСБН», «Смена ЛЗП» и т. д. Основная часть сигнализаторов объединена в табло навигационных сигналов (ТНС), расположенное на видном месте в кабине. Для целей сигнализации может использоваться также экран знаковой электроннолучевой трубки, на котором появляется соответствующий информационный текст.
ХАРАКТЕРИСТИКА ТИПОВОГО АВТОМАТИЗИРОВАННОГО НАВИГАЦИОННОГО КОМПЛЕКСА С АНАЛОГОВЫМ ВЫЧИСЛИТЕЛЕМ
Автоматизированные навигационные комплексы с аналоговыми вычислителями созданы на базе автоматических вычислителей координат с доплеровскими датчиками скорости и имеют более широкие возможности программирования полета.
Состав комплекса
В АНК с помощью вычислителя объединяются несколько датчиков навигационной информации (рис. 3): точная курсовая система (ТКС), доплеровский измеритель скорости и угла сноса (ДИСС), система воздушных сигналов (СВС), бортовая радиолокационная станция типа МНРЛС, бортовая аппаратура угломерно-дальномерной системы ближней навигации и посадки (РСБН).
В состав центрального устройства комплекса — навигационного вычислителя (НВ) — входят следующие основные блоки:
1) электронные и электромеханические блоки, предназначенные для счисления, преобразований и коррекции координат, вычисления параметров ветра и решения других частных задач;
2) пульты управления вычислителем: пульт режимов работы НВ (рис. 4); задатчики-индикаторы ортодромических координат (рис. 5) самолета 1 и 2, ППМ 3 и наземных средств коррекции 4; задатчики-индикаторы заданных ортодромических путевых углов участков маршрута 5; задатчик путевых углов ЛЗП («ИЗПУ») относительно меридиана радиомаяка 6, используемого для коррекции координат; задатчик-индикатор параметров ветра (рис. 6); механизм управления перекрестием (МУП) на экране БРЛС (рис. 7, г);
3) индикаторы номеров ППМ и ТПМ (точек посадочного маневра) и индикаторы корректирующих поправок ΔZ и ΔS (рис. 7, б, а).
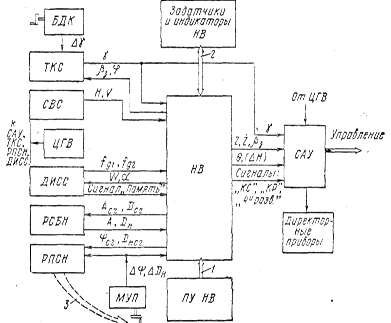
Рис. 3. Обобщенная блок-схема АНК с аналоговым вычислителем:
1—управление режимами НВ и АНК; 2 —обмен программными и текущими данными; 3 — данные наблюдения за экраном БРЛС (МНРЛС)
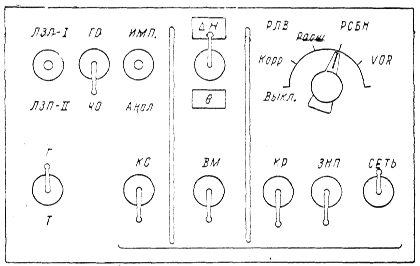 |
Рис. 4. Пульт управления навигационным вычислителем (пульт режимов работы)
Кроме того, для индикации режимов и признаков работы всего АНК имеется блок световых табло, управляемых также от НВ (рис. 7, в).
На общей блок-схеме АНК (см. рис. 3) показаны главные информационные связи датчиков, вычислителя, индикаторов и САУ, осуществляемые в различных вариантах в зависимости от конкретной, выполняемой в данный момент (период времени), функции НВ и конкретного режима управления самолетом.
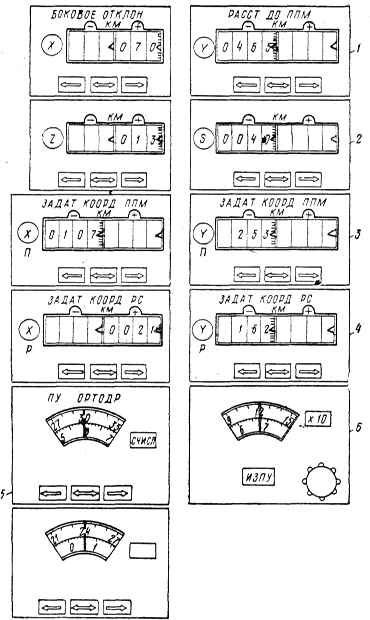
Рис. 5. Задатчики-индикаторы типового навигационного вычислителя:
1 и 2 — задатчики-индикаторы (счетчики) текущих (счисленных или преобразованных) координат самолета; 3 — задатчики координат ППМ; 4 — задатчики координат наземных средств коррекции; 5 — задатчики-индикаторы ОЗПУ; 6 — задатчик НЭПУ ЛЗП относительно меридиана радиомаяка
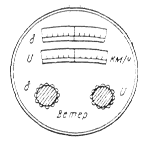
Рис. 6. Задатчик-индикатор параметров ветра
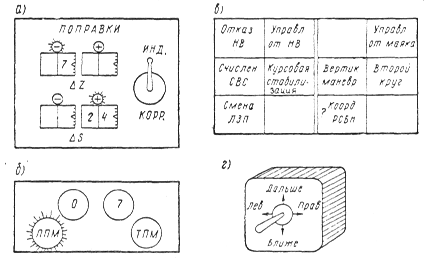
Рис. 7. Индикатор корректирующих поправок (а), табло номеров ППМ и ТМП (б), табло навигационной сигнализации (в), МУП (г)
Точная курсовая система (ТКС) постоянно выдает в НВ текущий условный курс γу самолета, отсчитанный от выбранного условного меридиана, и при необходимости магнитный или астрономический курс. В то же время в ТКС из НВ поступают заданный путевой угол, индицируемый на подвижном треугольном индексе указателя УШ-3, и широта МС, которая автоматически вводится в механизм азимутальной коррекции гироагрегатов.
Система воздушных сигналов (СВС) непрерывно выдает в НВ истинную воздушную скорость V для вычисления параметров δ и U ветра, счисления координат при отсутствии доплеровской информации, выработки расчетных угла сноса и путевой скорости, а также барометрическую высоту полета для выработки необходимых параметров в режимах коррекции и вертикального маневра.
Доплеровский измеритель скорости и угла сноса (ДИСС) выдает в НВ: в режиме «Импульсное счисление» — две доплеровские частоты fд1 и fд2, в режиме «Аналоговое счисление» — угол сноса а и путевую скорость W. В режиме «Память» («Счисление по СВС») в ДИСС из НВ поступают значения α и W, используемые для индикации при отсутствии доплеровской информации.
Угломерно - дальномерная система ближней навигации и посадки (РСБН) выдает в НВ азимут АС и наклонную дальность DH самолета относительно наземного радиомаяка, которые используются для определения точных (радиотехнических) координат в основной системе АНК, необходимых для коррекции счисленных координат.
Самолетная бортовая радиолокационная станция (например, МНРЛС типа «Гроза») обеспечивает измерение курсового угла и наклонной дальности до опознанного радиолокационного ориентира, по которым рассчитываются мгновенные координаты самолета в ЧО-системе, используемые далее для коррекции счисленных координат. Кроме того, БРЛС в сочетании с НВ позволяет определять ЧО-координаты наблюдаемого на экране неизвестного радиолокационного объекта, т. е. обеспечивает его «расшифровку».
Центральная гировертикаль (ЦГВ) связана непосредственно с некоторыми датчиками навигационной информации (ТКС, ДИСС, антенная система МНРЛС), обеспечивая их сигналами отклонения «самолетной вертикали» от вертикали истинной.
Система автоматического управления самолетом (САУ) служит для преобразования выходной навигационной информации, вырабатываемой НВ, в сигналы управления самолетом по крену и тангажу. В САУ из НВ поступают сигналы перехода на определенные режимы управления, информационные сигналы работоспособности схем НВ, боковое уклонение Z самолета от ЛЗП (по счислению) и его производная Ž по времени, заданный путевой угол для выхода в очередную запрограммированную точку, угол θ наклона траектории при выполнении вертикального маневра. Примерами систем автоматического управления первого поколения являются АБСУ-134А, КА-142, Путь-4, СТУ-154
Вопросы студентам:
1. Какие способы оптимизации навигационной информации Вы знате?
2. Какие устройства входят в УУИС?
3. Что такое интегральный навигационный индикатор?
4. Что входит в АНК с аналоговым вычислителем? Где применяются такие АНК?
5. Для чего в АНК применяется задатчик – индикатор НВ?
6. Для чего в АНК используются ТКС, СВС, ДИСС, РСБН, МНРЛС, ЦГВ, САУ? В каких системах счисления они работтают7 Что и как корректируют или коректируются?
Лекции 6, 7, 8
Автоматическая бортовая система управления АБСУ-134А
Система предназначена для установки на пассажирские самолеты Ту-134А для автоматизации управления самолетом на всех этапах полета: начиная с высоты 200 м на взлете и завершая заходом на посадку в автоматическом или директорном режимах до высоты 30 м и уходом на второй круг в автоматическом или директорном режиме.
АБСУ-134А обеспечивает автоматическое выполнение следующих функций:
§ стабилизация углов крена, тангажа, курса и заданной барометрической высоты;
§ управление по крену и тангажу от рукояток управления;
§ управление заданным курсом при ручной выставке;
§ автоматическое и директорное управление самолетом при заходе на посадку и уходе на второй круг в соответствии с нормами метеоминимума II категории;
§ управление самолетом и боковой плоскости при полете по радиомаякам VOR;
§ выполнение предпосадочного маневра (выполнение четвертого разворота по команде летчика и захват глиссады);
§ стабилизация и управление приборной скоростью полета с помощью автомата тяги:
§ стабилизация линии заданного пути по сигналам доплеровской навигационной системы;
§ триммирование и индикация усилий в системе управления рулем высоты при полете с включенным каналом тангажа автопилота;
§ индикация основных пилотажно-навигационных параметров и предупредительно-командная сигнализация;
§ предполетный и полетный контроль с указанием отказавшего режима, подканала, а также переключение на резервный режим работы.
АБСУ-134А сертифицирована в соответствии с нормами ЕНЛГС в составе самолета Ту-134А.
Комплекс автоматов КА-142
Комплекс КА-142 предназначен для обеспечения необходимых характеристик устойчивости и управляемости полета самолетов типа Ту-95 и Ту-142 в диапазоне высот до 15000 м и диапазоне скоростей до 960 км/час.
Комплекс повышает собственное демпфирование колебаний объекта, улучшает управляемость при ручном управлении, а также компенсирует момент при отказе одного из крайних двигателей на излете при положении указателя положения рычагов тяги (УПРТ) от 85 до 108 градусов.
Демпфирование короткопериодических колебаний самолета с помощью КА-142 основано на измерении угловых скоростей самолета относительно осей ОХ, ОУ, OZ и преобразовании измеренных величин в пропорциональное отклонение элеронов, руля направления и руля высоты.
Улучшение управляемости при ручном управлении осуществляется за счет введения в КА-142 сигналов отклонения штурвала и колонки.
Компенсация момента при отказе одного из крайних двигателей на взлете осуществляется электромеханизмом МП-АФ по сигналу соответствующего автофлюгера.
Комплекс КА-142 имеет шесть автономных каналов: каналы направления I и II; каналы крена I и II; каналы тангажа I и II.
Для повышения надежности каналы крена-тангажа дублированы и обеспечивают по каждому каналу половину передаточного числа.
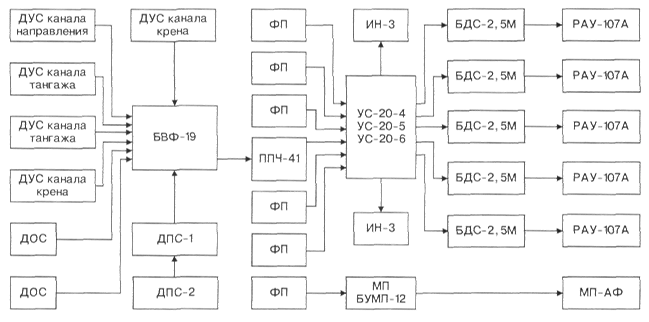
Состав комплекса (рис. 8):
§ датчик угловой скорости (ДУС) канала направления - для получения электрических сигналов, пропорциональных угловой скорости самолета относительно вертикальной оси.
§ датчики угловой скорости (ДУС) каналов тангажа (2 шт.) - для получения электрических сигналов, пропорциональных угловой скорости самолета относительно вертикальной оси.
§ датчики угловой скорости (ДУС) канала крена (2 шт.) - для получения электрических сигналов, пропорциональных угловой скорости самолета относительно вертикальной оси.
§ блоки добавочного сопротивления БДС-2,5М (5 шт.) - для включения в цепь якоря электродвигателя рулевого агрегата РАУ-107А с целью ограничения тока при повышенных нагрузках на штоке РАУ-107А.
§ датчик положения строенный ДПС-1 - измеряет перемещения штока механизма триммирования и преобразует эти перемещения в электрические сигналы.
§ датчик положения строенный ДПС-2 - измеряет перемещения штоков пружинного загружателя рычагов управления и преобразует их и электрические сигналы.
§ усилители сервопривода канала тангажа УС-20-4 (2 шт.) - суммируют управляющие сигналы по угловой скорости, отклонения колонки и штурвала и жесткой обратной связи на входе магнитного усилителя, а также усиления по мощности.
§ усилители сервопривода канала крена УС-20-5 (2 шт.) - суммируют управляющие сигналы по угловой скорости, отклонения колонки и штурвала и жесткой обратной связи на входе магнитного усилителя, а также усиления по мощности.
§ усилитель сервопривода канала направления УС-20-6 - суммирует управляющие сигналы по угловой скорости, отклонения колонки и штурвала и жесткой обратной связи на входе магнитного усилителя, а также усиления по мощности.
§ блок выпрямителей фазочувствительных БВФ-19 - для получения сигналов напряжения постоянного тока, полярность которого зависит от фазы входных сигналов.
§ блок управления МП БУМП-12 - управляет электромеханизмом МП-АФ по сигналу автофлюгера левого или правого крайнего двигателя самолета и возвращает шток МП-АФ в исходное положение по сигналу от кнопки.
§ пульт передаточных чисел ППЧ-41 - изменяет передаточные числа по сигналам угловых скоростей, сигналам отклонения колонки и штурвала самолета.
§ датчики обратной связи ДОС (2 шт.) - для получения электрических сигналов, пропорциональных углу поворота штурвала.
§ фильтры помех ФП (6 шт.) - снижают по цепи питания уровень помех радиоприему.
§ электромеханизм МП-АФ - для быстрого автоматического отклонения через необратимый гидроусилитель руля направления.
§ рулевые агрегаты управления РАУ-107А (5 шт.) - силовые исполнительные механизмы для управления золотником гидравлического усилителя самолета.
§ индикаторы нулевые ИН-3 (2 шт.) - индицируют положения штоков исполнительных механизмов относительно нейтрального положения.
§ кронштейн установочный КУ - для установки и закрепления усилителей сервоприводов каналов тангажа, крена и направления.
Рис. 8. Функциональная схема комплекса автоматов КА-142
 |
Командная пилотажно-навигационная система ПУТЬ-4
Командная пилотажно-навигационная система Путь-4 с помощью вычислительного устройства В-4С обеспечивают логическую и математическую обработку сигналов навигационных датчиков и формирование результирующего командного сигнала, выдаваемого на показывающий прибор ПП-1ПМ.
Пилотажно-навигационная система Путь-4 выполняет следующие функции:
§ полет по маршруту;
§ привод к аэродрому;
§ полет на заданной высоте и по заданному курсу;
§ пробивание облачности;
§ заход на посадку;
§ построение коробочки;
§ выдачу информации о неисправности системы и датчиков сигналов;
§ индикацию следующих параметров положения и движения ЛА:
- крена γ;
- команды по крену δЭ;
- тангажа ν;
- команды по тангажу δB;
- отклонения от глиссады ξ;
- курса ψ;
- заданного курса ψЗ;
- курсового угла радиостанции φКУР;
- отклонения от заданной линии пути ε;
- отклонения от заданного курса ΔψЗ;
- пеленга радиостанции φМП;
- скольжения β и др.
В систему входят (рис. 9):
§ вычислитель - В-4С;
§ навигационно-курсовой прибор - НКП-4;
§ радиосистема ближней навигации и посадки - РСБН-2;
Дата добавления: 2016-02-09; просмотров: 2099;