БОРТОВЫЕ РАДИОЭЛЕКТРОННЫЕ СИСТЕМЫ 2 страница
Пилотажно-навигационное оборудование военных самолетов приобрело исключительно комплексную структуру. В число новых функций пилотажно-навигационного оборудования военных самолетов вошли: автоматическое наведение истребителя на воздушную цель с использованием бортового прицельного (радиолокационного и электронно-оптического) комплекса, автоматический полет на малых и предельно малых высотах с огибанием рельефа местности, автоматический режим выхода самолета для атаки наземной цели, автоматическое управление полетом ударного самолета при использовании высокоточного авиационного вооружения с электронно-оптическими (лазерными и телевизионными) системами наведения и другое. Дистанционное наведение истребителя в район цели стало обеспечиваться по командам не только с наземного, но и с воздушного командного пункта (самолет дальнего радиолокационного обнаружения и управления типа А-50), а также с другого однотипного истребителя (дальний истребитель-перехватчик МиГ-31).
Аналого-цифровые системы автоматического управления с цифровыми вычислителями траекторного управления (например, САУ-10 для самолета Су-27) были дополнены резервированными электрическими дистанционными системами управления (ЭДСУ) самолетов. Благодаря разработке высоконадежных ЭДСУ, в функции которых входит не только улучшение устойчивости и управляемости самолета, но и активное ограничение предельных режимов полетов, стало возможным создание высокоманевренных самолетов, не обладающих продольной статической устойчивостью по перегрузке.
Характерным для этого периода пилотажно-навигационным комплексом стал ПHK-10 самолета Су-27, состоящий из системы автоматического управления САУ-10, информационного комплекса вертикали и курса ИК-ВК на основе ИКВ типа Ц-050, информационного комплекса высотно-скоростных параметров ИК ВСП на основе цифровой системы воздушных сигналов СВС-2Ц и системы ограничительных сигналов СОС-2, навигационного комплекса на основе БЦВМ А-313 и РСБН, системы единой индикации СЕИ "Нарцисс".
На этом этапе развития пилотажно-навигационного оборудования существенно возросла точность определения координат места самолетов, расширился диапазон метеорологических условий, при которых обеспечиваются безопасные полеты.
Выдающимся достижением национального приборостроения стал полет 15 ноября 1988 года воздушно-космического самолета "Буран". Впервые в мире на всех этапах от старта, выхода на орбиту и орбитального полета, до входа в плотные слои атмосферы, предпосадочного маневрирования, захода на посадку и автоматического приземления практически функционировал пилотажно-навигационный комплекс, обеспечивший к моменту приземления боковую ошибку навигации, равную 1 м, и продольную ошибку выдерживания графика полета - около 1 секунды.
Крупным достижением стало создание ударного авиационного ракетного комплекса - стратегического бомбардировщика Tу-95MC, вооруженного крылатыми ракетами типа Х-55.
Седьмой этап - 1985-1995 - пилотажно-навигационное оборудование базируется на широком использовании цифровых вычислительных машин и созданных на их базе многомашинных вычислительных систем. Значительным достижением стало создание пилотажно-навигационного оборудования для транспортного самолета Ан-124 и сверхзвукового стратегического бомбардировщика Ту-160.
В основу авионики этого периода была положена структурная организация пилотажно-навигационного оборудования на базе вычислительных систем: вычислительной системы самолетовождения (ВСС), вычислительной системы управления полетом (ВСУП), автоматизированной системы повышения устойчивости и управляемости (автоматизированной системы штурвального управления) и других.
В качестве средств отображения пилотажно-навигационной информации в аппаратуре этого поколения используются системы единой индикации на основе цветных электронных лучевых трубок. Для оборудования гражданских и военных самолетов и вертолетов были созданы цветные системы электронной индикации. Это и другое цифровое оборудование вошло в состав комплексов стандартного цифрового пилотажно-навигационного оборудования (КСЦПНО) гражданских самолетов Ту-204, Ил-96, Ил-114 Механические и электромеханические авиационные пилотажно-навигационные приборы приобрели значение резервных приборов. Большим достижением стало создание бесплатформенных инерциальных навигационных систем (БИНС) на основе лазерных гироскопов.
Вычислительные системы самолетовождения этого поколения обеспечивают решение широкого круга задач в многочисленных режимах работы, в том числе задач оптимизации режимов полета самолета. ВСС хранят в себе значительные массивы пилотажно-навигационной информации по обширным районам полетов и обеспечивают высокоточную четырехмерную навигацию.
К новым источникам навигационной информации для навигационных комплексов относятся приемники спутниковых систем навигации и бортовая аппаратура микроволновых систем посадки, обеспечивающих при заданном уровне безопасности автоматическое управление при взлете и посадке. Средства обеспечения безопасности полетов были дополнены системами предупреждения о попадании в сдвиг ветра.
Для отображения пилотажно-навигационной информации в аппаратуре этого поколения используются системы единой индикации на основе цветных электронных лучевых трубок, в создание которых внесли значительный вклад ОКБ "Электроавтоматика", НИИ АО, УПКБ и другие организации. В результате созданы цветные системы электронной индикации, нашедшие применение в составе комплексов стандартного цифрового пилотажно-навигационного оборудования (КСЦПНО) самолетов Ту-204, Ил-96, Ил-114.
Разработанные в восьмидесятых годах цифровые системы автоматического управления обеспечили не только полет в режимах сверхманевренности (САУ-10М самолета Су-35), но и первую в отечественной практике автоматическую посадку самолета Су-27К (Су-33) на палубу (САУ-10К). Тогда впервые в стране была решена проблема захода на посадку самолетов и вертолетов на авианосный корабль в штормовых условиях.
Значительный вклад в создание средств управления летательных аппаратов внесли специалисты МНПК "Авионика". В этот период были разработаны комплексные системы управления КСУ-915, КСУ-931, КСУ-515-57, КОТ-515-61, КСУ-61, КСУ-821 для самолетов-истребителей МиГ-29М, МиГ-29К, МиГ-31М, учебно-боевого самолета МиГ-АТ, а также комплексные системы автоматического управления перспективными самолетами различных классов и назначений КСУ-42М, КСУ-80, КСУ-54. КСУ-1-42, КСУ-130.
Опыт эксплуатации Су-27, МиГ-29, МиГ-31 и других самолетов, обладающих высоким боевым потенциалом, указал на проблему помощи летчику в решении сложных задач и преодолении "интеллектуального барьера", вставшего перед авиацией. В этих целях в ряде организаций (НИИ АО, ГосНИИАС и других) были созданы экспериментальные экспертные советующие системы, а в МНПК "Авионика" впервые были разработаны автоматическая система вывода самолета из штопора и комплексные системы управления маневренными самолетами.
В настоящее время разрабатывается и выпускается пилотажно-навигационное оборудование, в котором реализуется концепция интегрированных комплексов бортового оборудования, построенных на универсальных вычислительных системах с организацией обработки пилотажно-навигационной информации на нескольких последовательных уровнях.
Вопросы студентам:
1. С чего начинались навигационные комплексы?
2. Чем характеризовались комплексы перед Великой отечественной войной?
3. Приведите пример состава навигационного комплекса 50- годов.
4. Что такое пилотажно-навигационный комплекс? Приведите пример состава.
5. Какие задачи решались с помощью цифро-аналоговых пилотажно-навигационных комплексов?
6. Что такое «Полет-23»? Чем характеризуются комплексы 70-х годов?
7. Какие современные цифровые комплексы вы знаете?
Лекции 3,4
ПРИМЕНЕНИЕ АВТОМАТИЗИРОВАННЫХ НАВИГАЦИОННЫХ КОМПЛЕКСОВ
Ни одно отдельно взятое техническое средство навигации не является универсальным ни по объему решаемых задач, ни по применению в различных условиях навигационной обстановки. Поэтому практикой самолетовождения уже на первых этапах его развития был выработан основной принцип навигационной работы, заключающийся в совместном использовании различных, независимых друг от друга, навигационных средств.
Основная идея этого принципа — достижение наибольшей точности и надежности выполнения операций за счет компенсации недостатков одних датчиков навигационной информации преимуществами других. Например, объединение в курсовых системах магнитного, астрономического и гироскопического датчиков направления обеспечило надежное получение курса самолета практически в любых условиях полета — на прямолинейных участках ЛЗП и на разворотах, в областях нормального поля Земли и вне их, в условиях видимости небесных светил и под облаками.
Возникающие при большом объеме поступающей информации трудности ее обработки преодолеваются всесторонней автоматизацией измерительных, вычислительных и логических операций, т. е. повышением производительности умственного труда экипажей.
ОСНОВЫ АВТОМАТИЗИРОВАННОГО РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ
СОВРЕМЕННЫЕ ПРОБЛЕМЫ ВОЗДУШНОЙ НАВИГАЦИИ
Развитие гражданской авиации и расширение ее применения в различных областях народного хозяйства непрерывно изменяют и условия решения навигационных задач в полете.
Повышение интенсивности воздушного движения предъявляет новые требования к точности навигации в целях предупреждения столкновений между самолетами в воздухе при пересечениях воздушных трасс, а также для обеспечения приема прибывающих в зону аэропорта самолетов. Точная навигация является главным фактором, позволяющим повысить пропускную способность воздушных трасс за счет более плотного бокового, вертикального и продольного эшелонирования.
Для повышения экономической эффективности транспортных полетов дальние рейсы, например через океаны, организуются с выбором оптимального маршрута, учитывающего распределение ветра на трассе. Такие маршруты более сложны для навигационного обеспечения по сравнению с обычными ортодромическими трассами и требуют специальных мер для их успешного выполнения. Влияние экономики проявляется также в тенденции к сокращению летного экипажа, что требует, в частности, обеспечения командира экипажа автоматизированными бортовыми и наземными техническими средствами.
Общая логическая схема навигационного процесса, оставаясь в принципе неизменной, практически реализуется при скоростных и высотных полетах с существенными особенностями, вытекающими из требований к технике и методике навигации конкретных летательных аппаратов. Для обеспечения наибольшей надежности и точности в любых возможных условиях полета на борту современного самолета необходимо иметь несколько независимых датчиков курса и скорости полета, работающих на различных принципах действия, а определение текущих координат вести как методами независимых определений, так и методами счисления. Увеличение числа каналов сбора навигационной информации достигается также путем дублирования некоторых одинаковых датчиков.
Особенности траекторий и временных характеристик движения самолетов требуют выполнения всех вычислительных и логических операций немедленно в реальном масштабе времени или даже с упреждением (прогнозирование хода полета) и тем самым определяют необходимость высокой оперативности при сборе и обработке информации.
Повышенные требования предъявляются также и к пилотированию, которое должно обеспечить высокое качество регулирования режима полета и особенно качество переходных процессов: плавность (апериодичность), краткость (малую постоянную времени), астатизм (отсутствие систематической ошибки по окончании переходного процесса), устойчивость. Для выполнения этих задач необходимы повышение точности и оперативности выработки решений на изменение положения органов управления самолетом и его двигательной установкой.
Реализация отмеченных требований приводит к усложнению информационных процессов на борту летательного аппарата, резкому повышению их объема и темпа.
В связи с развитием средств сбора навигационной информации, усовершенствованием и созданием новых датчиков курса, высоты, скорости, угла сноса, параметров линий положения и других величин экипаж получает такой объем исходных данных, который не может быть полностью использован при решении задачи навигации «ручными» способами, когда основные вычислительные и логические операции выполняются штурманом или пилотом. Это является следствием ограниченных возможностей человека при обработке информации в процессе управления.
Существенным недостатком человека-оператора является также его ограниченная возможность оперировать с многозначными числами, даже при использовании средств механизации счета (линейки, номограммы и т. п.), что непосредственно сказывается на точности результатов.
Из других недостатков человека, как звена в системе управления, следует отметить утомляемость при выполнении однообразных операций, подверженность мешающему воздействию внешних факторов, малую оперативную память.
Все эти недостатки особенно сказываются на тех этапах полета, где навигационные и пилотажные задачи тесно переплетаются между собой (при сложном маневрировании на маршруте и заходе на посадку). Определение целесообразного воздействия на органы управления самолетом на основании показаний навигационных приборов требует в этих случаях быстрого и точного учета таких характеристик движения, как скорости изменения (производные) координат, без чего не обеспечиваются плавный вывод и удержание самолета на программной траектории. Выработка пилотажных решений чисто интуитивным или рефлекторным (приобретенным в процессе предыдущего опыта и тренировок) путем в условиях современных полетов уже себя не оправдывает. Так, при использовании для захода на посадку только нуль-индикаторов курса и глиссады пилот практически не в состоянии точно вести самолет по заданной программе, так как эти приборы не дают информации о скоростях изменения координат.
Применение автоматизации для совершенствования навигации и пилотирования современных самолетов основывается на ряде преимуществ вычислительных устройств по сравнению с человеком-оператором (пилотом или штурманом) при решении задач общей логической схемы навигации.
Эти преимущества следующие: высокая скорость выполнения вычислительных и простейших логических операций, высокая (при применении цифровых машин практически неограниченная) точность вычислений, большая оперативная память и малое время обращения к ней, быстрая реакция на внешние сигналы, меньшая подверженность ошибкам при выполнении многократно повторяющихся операций, отсутствие «усталости».
Однако преимущества автоматических устройств при выполнении конкретных операций навигационного процесса не умаляют ведущей роли человека на пилотируемом летательном аппарате, для которого любая машина является орудием, повышающим производительность труда. Человек обладает целым рядом психофизиологических свойств, позволяющих решать навигационные задачи, как и вообще задачи управления, в условиях, когда машина оказывается неэффективной. К таким свойствам относятся:
большой диапазон принимаемых сигналов;
способность к инициативе в случаях изменения обстановки, требующих творческого решения задачи и выработки суждений в условиях недостаточности поступающей информации;
длительная память, позволяющая учитывать накопленный опыт.
Основными задачами автоматизации навигации являются:
§ сбор первичной информации от всех применяемых в данных условиях датчиков;
§ обработка полученных данных оптимальными способами;
§ полное (по трем координатам) решение навигационной задачи с использованием точных аналитических зависимостей на основе оптимального комплексного использования различных датчиков;
§ решение всех вычислительных и логических задач в реальном масштабе времени, с наименьшим временем запаздывания;
§ обеспечение наглядной и оперативной автоматической индикации внешних условий и навигационных элементов движения самолета;
§ повышение экономичности полетов.
ПРИНЦИП И ОСНОВНЫЕ ОПЕРАЦИИ АВТОМАТИЗИРОВАННОГО НАВИГАЦИОННОГО ПРОЦЕССА
На базе современной техники можно создать автоматическую систему управления, обеспечивающую решение задач воздушной навигации без всякого участия человека. Известны образцы беспилотных самолетов и других летательных аппаратов, навигационно-пилотажное оборудование которых обеспечивает взлет, полет с необходимым маневрированием по заданной траектории и посадку. Однако надежность и стоимость этих средств далеко не соответствуют требованиям гражданской авиации. Поэтому все современные автоматизированные навигационные средства гражданских самолетов развиваются как средства автоматического выполнения возможно большей части функций общей логической схемы навигации под контролем и управлением экипажа, осуществляющего ответственные, но несложные (в основном логические) операции.
Автоматизированным навигационным комплексом (АНК) называется совокупность конструктивно связанных между собой бортовых навигационных средств, обеспечивающих решение экипажем навигационной задачи при совместном использовании нескольких (бортовых, наземных, спутниковых) датчиков исходной информации и автоматическом выполнении вычислительных и части логических операций.
В состав АНК входят следующие характерные группы бортовых средств:
§ датчики навигационной информации (ДНИ);
§ один или два навигационных вычислителя (НВ);
§ устройства управления, индикации и сигнализации (УУИС);
§ вспомогательные устройства (блоки коммутации, специальные источники электропитания и др.).
Решение навигационной задачи заканчивается выработкой сигналов отклонения самолета от заданной пространственно-временной траектории (программы) полета и выбором алгоритма (метода) устранения отклонений с определением регулируемых параметров (z, ż, Δβ, ΔH и т. д.).
Непосредственное управление самолетом осуществляется группой бортовых устройств, составляющих автоматизированный пилотажный комплекс (АПК). Взаимодействие АНК и АПК состоит в том, что АПК, приняв навигационную информацию от АНК, формирует на ее основе командные пилотажные сигналы по крену, тангажу и воздушной скорости и реализует их через автопилот или командно-пилотажные (директорные) приборы. Тесно связанные между собой АНК и АПК составляют в совокупности навигационно-пилотажный комплекс самолета (НПК).
Общая схема работы АНК
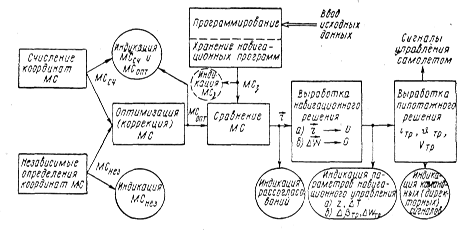 |
Рис. 1. Общая схема решения навигационной задачи в АНК
Общая схема работы АНК (рис. 1) складывается из выполнения следующих основных операций.
Перед полетом производится навигационное программирование, заключающееся в формировании и вводе в память НВ информации, характеризующей заданный пространственно-временной график движения и параметры наземных средств коррекции.
Наиболее совершенные АНК с цифровыми вычислителями требуют ввода только географических координат, высот, времен прохода всех ППМ и координат средств коррекции. Преобразование этих данных в параметры, непосредственно используемые при решении навигационных задач, выполняется в НВ автоматически. В другие АНК (как правило, с аналоговыми НВ) вводятся уже готовые программные данные для каждого этапа полета (путевые углы, расстояния, ортодромические координаты средств коррекции), расчет которых по исходным данным должен выполняться вне АНК при подготовке к полету.
В полете по данным автономных датчиков (доплеровских, инерциальных, аэродинамических) ведется непрерывное счисление текущих координат места самолета (МССЧ). Периодически или непрерывно производится определение координат независимыми методами (МСНЕЗ) с помощью автономных средств (БРЛС, астроориентатора, визуально) или радионавигационных систем (УДНС, РДНС). По результатам независимых определений производится оптимизация текущих координат, определяемых комплексом, которая может выполняться автоматически, полуавтоматически или вручную.
Полученные оптимизированные координаты МС0ПТ сравниваются с программными (заданными) координатами МСЗ, в результате чего определяется вектор рассогласования r или его составляющие — боковое отклонение z самолета от ЛЗП и ошибка ΔS по дальности в текущий момент времени. На основании данных о векторе рассогласования вырабатывается навигационное решение: во-первых, выбирается метод навигации («непосредственная коррекция» или «управление навигационным режимом») и, во-вторых, определяются регулируемые параметры принятого метода.
При методе непосредственной коррекции регулируемыми параметрами, приводимыми к нулевым значениям, являются отклонения текущих координат самолета от их программных значений в данный момент времени: линейное боковое отклонение Z от ЛЗП (ошибка боковой координаты) и расчетное значение ошибки ΔT времени прибытия в контрольную точку (являющееся следствием ошибки ΔS продольной координаты) или угловое уклонение ΔАС самолета от ЛЗП, заданной как ЛРПС относительно УДНС (РСБН или VOR/DME), а также ошибка ΔT времени прибытия.
Если применяется метод управления навигационным режимом, регулируемыми будут параметры вектора путевой скорости — путевой угол β (или его поправка Δβ) и величина путевой скорости W (или поправка ΔW).
Получаемые текущие значения регулируемых параметров, а часто и их производные (также формируемые в АНК), передаются в пилотажный комплекс для выработки сигналов управления самолетом.
В процессе автоматизированного решения навигационных задач управляющая роль экипажа обеспечивается работой устройств управления, индикации и сигнализации (УУИС), которые позволяют постоянно или периодически (по вызову) получать информацию о текущих координатах, элементах движения, параметрах вектора рассогласования, состоянии основных частей комплекса. На основе этой информации экипаж следит за автоматическим процессом навигации, но при необходимости вмешивается в его ход, используя пульты управления для реализации навигационных решений, выходящих за рамки возможностей автоматики.
Основу АНК и АПК, обеспечивающую им качественно новые возможности по сравнению с другими навигационными средствами, составляют вычислительные устройства, используемые на всех этапах обработки информации. Центральный вычислитель может выполнять не только операции собственно навигационной задачи, но и вычислительную обработку в целях оптимизации первичных измерений (например, курса, путевой скорости), а также автоматический контроль работы датчиков и своих собственных вычислительных схем. Характеристиками вычислительного устройства, примененного в данном АНК, во многом обусловливаются навигационные возможности комплекса в целом.
Переход к автоматизированному решению навигационных задач при использовании многих источников информации требует решения ряда принципиальных вопросов, связанных с выбором основной системы координат АНК, вида аналитических зависимостей для решения навигационных задач, способов отыскания оптимальных значений навигационных параметров и координат МС при наличии избыточной информации, объема и вида необходимой индикации различных навигационных величин, способов управления автоматическими устройствами со стороны экипажа.
Основная система координат АНК
Основной системой координат автоматизированного навигационного комплекса называется система, применяемая в нем для вычислительных операций при счислении координат самолета, их сравнении, коррекциях и выработке управляющих сигналов.
Проблема основной системы координат и связанное с ней навигационное программирование возникли в связи с необходимостью применения аналитических методов обработки информации о координатах самолета, получаемых от нескольких разнородных датчиков — АВК, БРЛС, астроориентаторов, УДНС, РНДС и др. Каждый из этих датчиков выдает координаты в своей специфической системе: АВК и астроориентатор — в географической (геосферической) и ортодромической; БРЛС и УДНС—в полярной относительно различных наземных точек; РДНС — в криволинейной (гиперболической) относительно двух баз наземных станций. При использовании полетной карты была возможность наносить МС в любой системе координат, для чего на ней, кроме географической, строились вспомогательные координатные сетки: биполярная — для УНС; азимутально-дальномерная — для УДНС; гиперболическая — для РДНС; ортодромическая — для АВК ортодромической системы координат и т. д. Тем самым взаимное положение нескольких МС, относящихся к одному времени, но полученных разными путями, было видно непосредственно на карте, их расхождения измерялись линейкой, и для каждого МС легко определялось отклонение от заданной программы, также нанесенной на карту в виде маршрута полета. Однако такой прием совместной обработки информации от различных датчиков не может быть основой автоматического решения навигационных задач главным образом из-за неточности графических построений.
В качестве основной системы координат АНК, как правило, применяется ортодромическая система, связанная либо с ортодромией каждого участка маршрута («частные ортодромии»), либо с одной ортодромией для района полета («главная ортодромия»). На рис. 2 показано расположение на сфере осей главно-ортодромической (Ох и Оу) и частно-ортодромической (OZ и OS) систем координат для одного и того же маршрута. Отсчет продольной координаты (у — в ГО-системе и S — в ЧО-системе) производится от конца этапа, т. е. эта координата имеет отрицательные значения и достигает нуля только в ППМ (КПМ) каждого участка.
Выбор ортодромической системы в качестве основной объясняется тем, что в ней благодаря применению формул плоской тригонометрии проще всего реализуется непрерывное определение текущих координат МС. Кроме того, в этой системе довольно просто обеспечиваются сравнение координат при коррекциях МС по данным радионавигационных средств и выработка навигационных и пилотажных решений, так как одна частно-ортодромическая координата (Z) непосредственно представляет собой боковое отклонение от ЛЗП, а другая (S) — оставшееся расстояние до контрольной точки (ППМ). Наконец, ортодромическая система координат наиболее удобна при использовании навигационного гирополукомпаса (НГПК) — основного курсового прибора современных самолетов гражданской авиации.
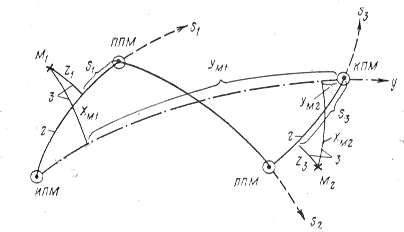
Рис. 2. Главно-ортодромическая (ГО) и частно-ортодромическая (ЧО) системы координат на сфере
Аналитические зависимости для решения задач в АНК
Современная вычислительная техника, особенно цифровая, позволяет реализовать сложные математические зависимости сфероидической геометрии и решать по ним навигационные задачи с любой необходимой степенью точности. Однако невысокая точность исходных данных (особенно при использовании курсовых приборов) позволяет для решения задач воздушной навигации считать поверхность Земли сферической и применять математический аппарат сферической тригонометрии. Этому соответствует и применение в АНК ортодромической системы координат в качестве основной. В то же время все исходные координаты точек на земной поверхности известны только в географической системе, т. е. на эллипсоиде.
В зависимости от требуемой точности замена эллипсоида шаром выполняется различными методами.
В простейшем случае Земля принимается за шар с радиусом R = 6371 км, а геосферические координаты φ и λ считаются равными географическим φгеогр и λгеогр; такое упрощение приводит к максимальным ошибкам в расстояниях до 0,5% и в углах — до 0,4°.
В другом случае исходные географические координаты φгеогр и λгеогр предварительно с помощью метода проф. В. В. Каврайского переводятся в геосферические по формулам:

а Земля считается шаром с радиусом R=a(1-c/4)=6372,9 км,
где а = 6378245 м — большая полуось эллипсоида Красовского,
с=(a-b)/a » 1/300 — его сжатие,
b = 6356863 м — малая полуось.
Этот прием обеспечивает уменьшение максимальных ошибок до 0,08% в расстояниях и до 6' — в углах.
Наконец, пересчет географических координат в геосферические можно выполнять по тем же формулам, но радиус Земли выбрать таким, чтобы вдоль заданной ортодромии частный масштаб отображения эллипсоида на сфере был равен единице:
где φ и β — геосферическая широта и путевой угол в любой, в том числе и начальной, точке заданной ортодромии (так как вдоль ортодромии произведение sinβ×cosφ=const). При этом методе достигается точность отображения расстояний до 0,001%.
Однако и сферические зависимости используются часто только для подготовки исходных данных, вводимых в АНК, а само решение навигационных задач ведется по еще более простым зависимостям—формулам прямолинейной тригонометрии. Это обеспечивает значительное упрощение аппаратуры навигационных вычислителей, сохраняя в то же время при определенных условиях вполне удовлетворительную точность результатов.
Возможность применения плоской тригонометрии в навигационных задачах зависит от величин рассматриваемых расстояний, которые лишь в отдельных случаях достигают нескольких тысяч километров (при счислении координат над океаном между коррекциями и при использовании систем дальней радионавигации). При применении же БРЛС, большей части УНС и УДНС ближней навигации расстояния не превосходят 400—500 км.
Дата добавления: 2016-02-09; просмотров: 2358;