Механические и электромеханические характеристики асинхронного двигателя.
В настоящее время большое распространение получил электропривод переменного тока на базе простой по устройству и надежной в эксплуатации асинхронной машины.
Асинхронные двигатели получили большое распространение благодаря следующим своим качествам:
- своей дешевизне двигателя,
- простоте конструкции,
- достаточной высокой надежности,
- относительно высокого КПД,
- меньшего расхода цветных металлов на единицу мощности в 1,5-2 раза, чем для двигателя постоянного тока.
К недостаткам асинхронного двигателя следует отнести:
1. Квадратичная зависимость момента от напряжения, т.е. при падении напряжении в сети значительно уменьшится пусковой и максимальный момент.
 ; Хк=Х+Х'2.
; Хк=Х+Х'2.
2. Опасность перегрева статора особенно при повышенном напряжении,
3. Малый воздушный зазор, который несколько понижает надежность двигателя.
Наибольшее распространение среди асинхронных двигателей получил двигатель с короткозамкнутым ротором. Асинхронные двигатели с короткозамкнутым ротором применяются для механизмов с длительным режимом работы и не требующих регулирования скорости: в доменных цехах, используют для электропуска на электроприводе нагрузки кокса, для транспорта, в прокатных цехах, для тракторов и т.д.
Асинхронный двигатель с короткозамкнутым ротором применяют для тельферов, кран-балок, тихоходных мостовых кранов и пока широко применяют для электроприводов насосов малой мощности, транспортеров. В настоящее время наблюдается тенденция для использования двигателя с короткозамкнутым ротором в системах ПЧ-АД (преобразователя частоты в асинхронных двигателях).
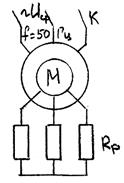
Применение двигателя с фазным ротором оправдывается в следующих случаях:
1. Для мостовых кранов, нормальных и быстроходных, где требуется регулирование скорости на приводе моста, тележки и подъема груза.
2. Для маховичных приводов типа ножницы, прессы, главные приводы станков.
3. Для приводов, работающих с большой частотой включения, где асинхронный двигатель с короткозамкнутым ротором не проходит по нагреву или не дает требуемых динамических характеристик для торможения.
Ер=ЕрнS;  ; S – скольжение.
; S – скольжение.
f2=f1-S; f1 – частота сети, f2 – частота ротора.
 ; р – число пар полюсов.
; р – число пар полюсов.
 ; n – обороты ротора.
; n – обороты ротора.
w=w0(1-S); n=n0(1-S);
М=КФI2cosy; y - угол между ЭДС и током ротора.
Дата добавления: 2016-02-09; просмотров: 1575;